一种光脉冲调制引导的舰载飞机近场视觉导航方法
本发明涉及计算机视觉领域,更具体地说,涉及一种光脉冲调制引导的舰载飞机近场视觉导航方法。
背景技术:
1、舰载型无人机可执行综合侦察、辅助探潜、通信中继、电磁对抗、应急保障等任务,具有低成本、长续航、用途广的优势,在海军作战体系中扮演越来越重要的角色。受海上环境和舰船自身运动的影响,舰载型无人机着舰阶段事故率最高,因此舰载飞机着舰技术的发展非常关键。
2、目前国内外常用的无人机导航方式有:惯性导航系统(ins)、全球定位系统(gps)、ins/gps 组合导航系统、视觉导航系统。惯性导航系统的误差随时间积累,gps抗干扰能力差,均不能满足复杂作战环境中舰载型无人机自主着舰的需求,而视觉导航系统能够自主输出无人机速度和航向的控制量,能耗低、抗干扰能力强、精确度高,与其他导航系统相比更适合舰载型无人机完成自主着舰任务。
3、基于计算机视觉的无人机视觉导航技术可被定义为:无人机在飞行过程中以电荷耦合组件ccd摄像机获取图像,使其具备与外界环境交互的能力,并对图像加以处理,进而获得无人机的位置和姿态等导航信息。基于位置的伺服控制技术和基于图像的伺服控制技术是常用的无人机视觉导航技术。基于位置伺服的方法是根据相机解算出无人机与合作标志的相对位置,再根据相对位置控制无人机的航向和速度,实现自主着舰。而基于图像伺服的方法则是根据视觉辅助装置采集合作标志的图像特征直接得到无人机的航向和速度控制量,提高了控制的时效性和准确度。
4、目前广泛应用的无人机视觉导航技术测距距离较小,在抗干扰能力、稳定性和定位精度方面都有待提升和突破。
技术实现思路
1、为解决上述技术问题,本发明提供一种光脉冲调制引导的舰载飞机近场视觉导航方法,利用无线紫外光通信技术实现舰载飞机与地面信号发射端的通信保持以及移动定位功能,利用rssi测距技术实现无线紫外光测距,保证舰载飞机在降落过程中能够实现精确、稳定的定位。
2、为达到上述目的,本发明采用的技术方案为:
3、一种光脉冲调制引导的舰载飞机近场视觉导航方法,包括以下步骤:
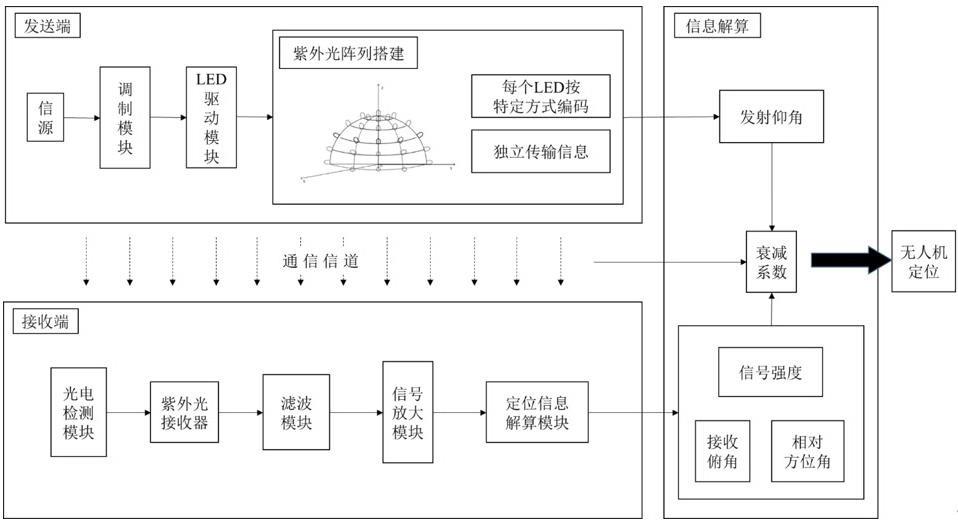
4、步骤1、搭建地面的发送端,所述发送端包括用于信号调制的微控制器、调节led发光强度的led驱动模块以及紫外光led阵列;
5、步骤2、按半球经纬线的方式排列紫外光led阵列并对每个led进行独立编码,使得每个led独立发送带有区分性的光信号;
6、步骤3、搭建机载紫外光的接收端,所述接收端包括保证紫外光直视通信的光电检测模块、紫外光接收器、处理信号的滤波、放大模块以及接收信息处理端口;当发送端的led传送信息后,光电检测模块通过实时搜索信号最高强度的方向,从而驱动紫外光的接收端向发送端对准,保证无线紫外光直视通信,从而接收光信号;
7、步骤4、将接收的光信号转换为可利用的电信号;
8、步骤5、综合发送端和接收端解算的发射仰角、接收信号强度、接收俯角、相对方位角以及大气信道衰减系数,得到无人机的具体定位,利用通信链路的长度来表示距离:
9、,
10、其中为地面的发射端在单个led上分配的发射光功率,为无人机挂载的紫外光的接收端的接收孔径面积,是无人机降落过程中与地面建立通信时大气信道中的衰减系数,表示无线紫外光通信系统从发射端到接收端之间的直线距离,为接收端接收到的功率,lambertw为朗伯w函数。
11、进一步地,所述发送端对原始数据进行调制处理,并经过光电转换模块输出到led驱动模块、将调制信号加载到led上,使led通过变化发光强度、闪烁频率向外传递信息;所述led为紫外光led。
12、进一步地,所述步骤4具体包括:
13、(1)通过光电转换模块将光信号转换为电信号;
14、(2)通过带通滤波模块和跨阻放大模块对信号进行处理;
15、(3)通过微控制器对信号进行解调处理;
16、(4)对解调后的信号进行分析,得到可利用的定位解算信息。
17、本发明与现有技术相比所具有的有益效果:
18、(1)提供舰载飞机降落过程中的定位精度。太阳光辐射波长为200nm~280nm的紫外线传播到地面的过程中,受到地球表面的大气层的吸收散射作用,能够到达近地面地区的太阳光紫外线非常少,几乎可以忽略不计,紫外光通信通常采用该波段紫外光作为载体,进行数据信息的传输,进而降低环境噪声对无线紫外光通信的影响。
19、(2)提高舰载飞机在复杂环境中的通信稳定性。大气环境下,空气中的微小粒子对紫外线又强烈的吸收和散射作用,无线紫外光通信技术能够在复杂大气条件、强电磁干扰、无线电静默等环境下实现通信。
20、(3)提高舰载飞机近场视觉导航测距距离。紫外光通信可用于1~2km的非视距通信,如果采用聚光方式,定向视距通信距离可达5~10km,远远大于目前无人机视觉导航的普遍测距距离。
技术特征:
1.一种光脉冲调制引导的舰载飞机近场视觉导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种光脉冲调制引导的舰载飞机近场视觉导航方法,其特征在于: 所述发送端对原始数据进行调制处理,并经过光电转换模块输出到led驱动模块、将调制信号加载到led上,使led通过变化发光强度、闪烁频率向外传递信息;所述led为紫外光led。
3.根据权利要求2所述的一种光脉冲调制引导的舰载飞机近场视觉导航方法,其特征在于:所述步骤4具体包括:
技术总结
本发明提供一种光脉冲调制引导的舰载飞机近场视觉导航方法,其用于舰载飞机降落过程中,针对现有视觉导航算法测距距离小、通信稳定性弱和定位精度低的问题,本发明采用光脉冲调制的方法进行飞行定位,具体采用无线紫外光通信技术实现舰载飞机与地面信号发射端的通信保持以及移动定位功能,利用RSSI测距技术实现无线紫外光测距,保证舰载飞机在降落过程中能够实现精确、稳定的定位。
技术研发人员:罗晓燕,李亚玲,史晓锋,刘博,万寒
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!