一种目标点精确定位和大型工件测量装置及其测量方法
本发明属于测量,具体涉及一种目标点精确定位和大型工件测量装置及其测量方法。
背景技术:
1、现有的定位方法可以分为两大类:相对定位和绝对定位方法。相对定位系统是通过测量运动体相对于初始位置的方法来实现定位的,其特点是长时间定位累计的误差大,不适于精确定位。绝对定位系统则通过运动体的绝对位置来实现定位,主要是依靠声纳、视觉传感器等。绝对定位精度较高,也可以用来修正相对定位系统的误差,它的主要缺点是实现相对较为复杂。当前常见的空间定位技术有机械定位技术、红外(光学)定位技术、电磁定位技术、超声波定位技术、基于视觉传感器的定位技术和混合惯性定位技术等。其中应用较为广泛的是:
2、1.机械定位:机械定位方法是利用各种机械设备和传感器来获取被测物体的位置和转角的,是一种相对定位方法。机械定位无需特别计算就可以知道摄像机的位置,跟踪数据几乎没有延时;摄像机的位置参数非常精确;无需额外的工作站处理跟踪信息等。缺点是:可使用的摄像机的种类及数量受到限制,不能使用手持式摄像机;需要为每一台摄像机安装传感器,安装成本较大且不太方便;摄像机的机械跟踪系统部分过于庞大、笨重,因此增加了参与者灵活使用的难度;机械跟踪需要对摄像机的镜头进行精确的测量,校正困难;在拍摄之前,需要一个非常耗时的过程来获得摄像机的初始位置和方向。
3、2.红外定位:红外定位需要在世界坐标系中安装一套可以发射和接收红外线的红外摄像机对准靶标,摄像机顶部还需安装红外线反射球。通过对反射回摄像机的红外线进行图像处理,以确定摄像机的位置和方位,是一种绝对定位方法。红外定位的优点是:红外线的传播速度快,因此具有较高的更新率和较低的延时,有较大的工作范围,受光照影响小。缺点有:红外定位方式是基于三角测量的,所以要求靶标和反射球之间不能有遮挡。
4、3.基于视觉传感器的定位:基于视觉传感器的定位方法利用摄像机图像像素位置与场景点位置之间的关系,根据摄像机模型,由已知特征点的图像坐标和世界坐标求解摄像机在世界坐标系中的位置;或者对图像进行一系列的几何或者其它运算,得出摄像机的三维位置信息,是一种绝对定位方法。基于视觉传感器的定位方法的优点是:简单实用、适用范围广,安装比较方便;可直接使用便携式摄像机;摄像机可以不用轨道进行运动。但这种技术也有一定的缺点:计算机需要完成模板上点阵的物理坐标和模板图像之间对应点的匹配,因此数据处理时间长,定位有一定的延时;摄像机必须拍摄到模板图像,因此在定位过程中,模板不能被全部挡住,并且必须准确知道参考点的坐标;图像的清晰度较低,因此这种摄像机定位方式的定位精度不是特别高;在模板内标记参考点也不是一件容易的事情。
5、综上所述,机械定位法设备复杂,初始标定困难。基于视觉传感器的方法精度不够高。
技术实现思路
1、本发明提供一种目标点精确定位和大型工件测量装置及其测量方法,用以解决现有技术中初始标定困难且精度不高的问题。
2、本发明通过以下技术方案实现:
3、一种目标点精确定位和大型工件测量装置,所述测量装置包括运动范围调整部、角度调整部、竖向位移调整部和横向位移调整部;
4、所述运动范围调整部,用于大范围调整测量点的位置,控制测量装置移动,使其到达适合相机组作业的大概方位;
5、所述角度调整部,用于360度调整装置的工作视角;
6、所述竖向位移调整部,用于对不同高度的目标点进行标定;
7、所述横向位移调整部,用于控制相机组的移动范围,使其提高测量精度。
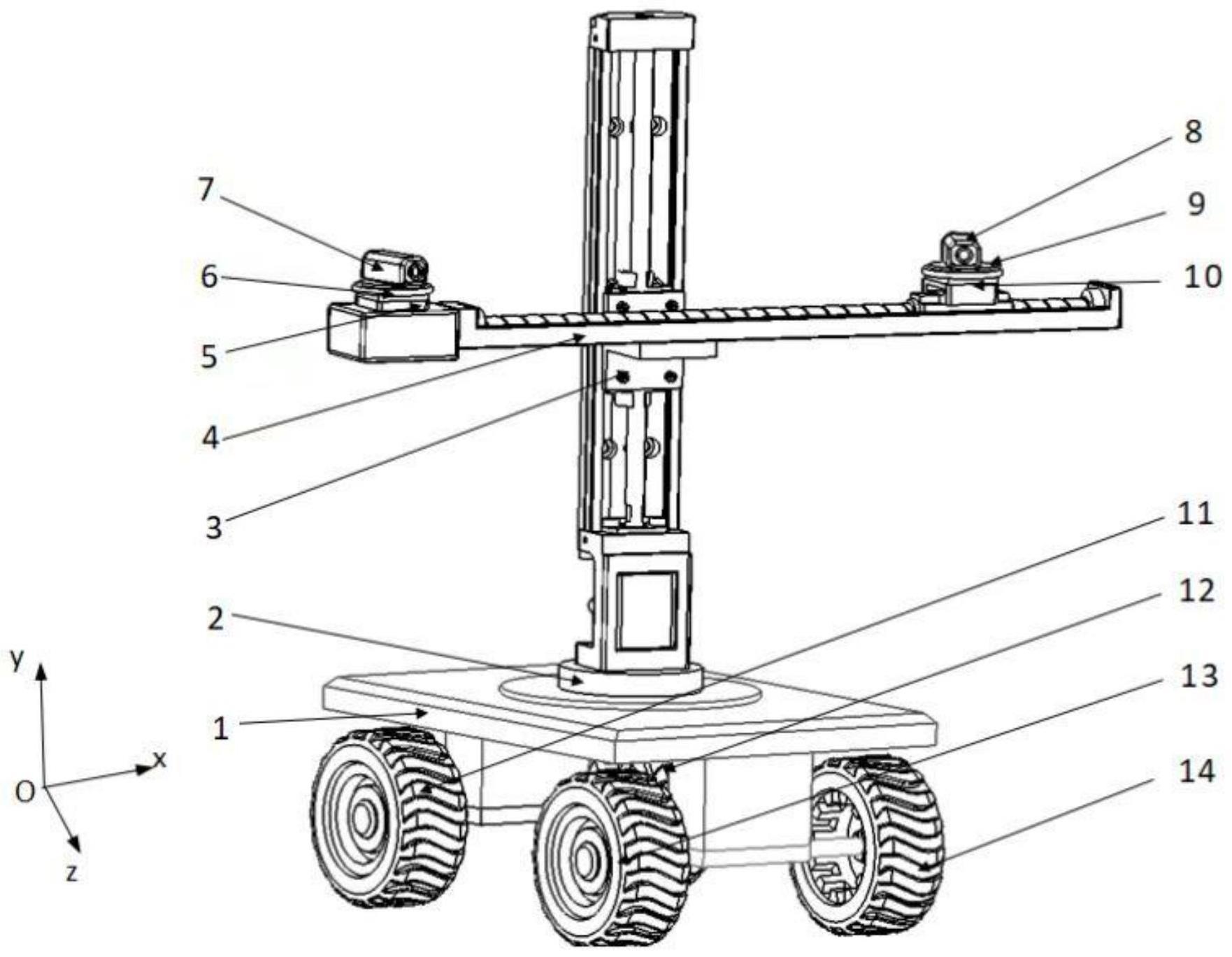
8、一种目标点精确定位和大型工件测量装置,所述运动范围调整部的上表面设置角度调整部,所述角度调整部的顶端设置竖向位移调整部,所述竖向位移调整部上设置横向位移调整部,通过横向位移调整部的相机(7)与相机(8)对目标点进行精确定位。
9、一种目标点精确定位和大型工件测量装置,所述运动范围调整部包括车载工作平台1,所述角度调整部包括回转平台2,所述竖向位移调整部包括升降机构3,
10、所述车载工作平台1的顶端设置回转平台2,所述回转平台2的中心设置升降机构3。
11、一种目标点精确定位和大型工件测量装置,所述横向位移调整部包括水平移动机构4、固定支架5、相机转台6、相机7、相机8、相机转台9和移动支架10;
12、所述水平移动机构4的一端设置固定支架5,所述固定支架5的上端设置相机转台ⅰ6,所述相机转台ⅰ6的上端设置相机ⅰ7;
13、所述水平移动机构4上滑动连接移动支架10,所述移动支架10上设置相机转台ⅱ9,所述相机转台ⅱ9的上端设置相机ⅱ8。
14、一种目标点精确定位和大型工件测量装置,所述升降机构3的底端设置升降电机,用于控制与横向位移调整部中的水平移动机构4的升降。
15、一种目标点精确定位和大型工件测量装置的测量方法,所述测量方法包括以下步骤:
16、步骤1:将如权利要求1的测量装置进行组装;
17、步骤2:确定测量目标点的位置,并控制运动范围调整部到目标点附近,即适合相机组作业的大概方位;
18、步骤3:控制角度调整部确定相机ⅰ7和相机ⅱ8正对被测目标;
19、步骤4:控制竖向位移调整部将相机ⅰ7和相机ⅱ8调整至与被测目标在同一高度;
20、步骤5:控制横向调整部中相机ⅰ7和相机ⅱ8的角度及位置,确定与被测目标点在一个水平面上;
21、步骤6:基于步骤5调整的水平面,建立坐标系,得到测量装置与目标点的相对位置关系,实现大型工件测量。
22、一种目标点精确定位和大型工件测量装置的测量方法,所述步骤2具体为,通过控制回转平台2旋转一定的角度,使得相机的镜头朝向目标点方向,通过绝对编码器可得到回转平台回转的角度;
23、所述步骤3具体为,控制升降机构3将水平移动机构4上的相机上升到与目标点相同的高度,通过绝对编码器可得水平移动机构4的高度;
24、所述步骤4具体为,再通过水平移动机构4移动相机8的位置,从而可以调整两个相机之间的距离,通过绝对编码器可得到相机7和相机8之间的距离。
25、一种目标点精确定位和大型工件测量装置的测量方法,所述步骤5具体为,通过绝对编码器可得到旋转的角度:控制相机转台9进行旋转,使得目标点成像在相机8的中心点上,即可得到相机8的中心线与水平移动机构4的夹角;同理,控制相机转台6进行旋转,使得目标点成像在相机7的中心点上,即可得到相机7的中心线与水平移动机构4的夹角。
26、一种目标点精确定位和大型工件测量装置的测量方法,所述步骤6具体为,相机7和相机8的中心点与目标点在同一个水平面,并且构成一个三角形,根据测量原理,求得目标点距离水平移动机构4的距离;
27、确定出目标点在大型工件测量装置坐标系下的坐标;
28、得到机器人与工件之间的相对位置关系,实现了对目标点的精确定位。
29、一种目标点精确定位和大型工件测量装置的测量方法,所述测量原理为目标点为p,o1为相机1的光心点,o2为相机2的光心点。o1p与相机1镜头所处的平面垂直,o2p与相机2镜头所处的平面垂直,已知两相机镜头所在的基线o1o2的长度为l,并且o1p与o1o2的夹角为α,o2p与o1o2的夹角为β,目标点p与o1o2的距离为h;
30、则目标点与基线的距离h与基线长度l之间的关系为:
31、l=h(ctgα+ctgβ)
32、根据上式即可求得目标点p与o1o2的距离h。
33、本发明的有益效果是:
34、本发明具有简便快捷且精度高的优点。
35、本发明不仅克服了相机远距离测量精度无法保障的困难,并且该测量设备可移动并具有很高的测量精度,节省效率,生产效率可得到提高。
- 还没有人留言评论。精彩留言会获得点赞!