一种移动式遥操作超声探伤系统及其使用方法
本发明属于工业在役设备远程运维巡检超声探伤,具体涉及一种移动式遥操作超声探伤系统及其使用方法。
背景技术:
1、随着工业的发展,一些重要领域如交通、航空航天、核能等对使用的工件在强度和使用年限上都有一定的要求,为保证运行安全,对工件进行无损检测已成为工业领域不可缺少的重要技术。超声无损检测技术具有检测精度高、检测深度大、检测成本低以及在检测过程中不会对设备造成二次伤害的优点,已广泛应用于现代工业的探伤领域。目前,超声无损检测方法有传统手工超声无损检测、机器人超声无损检测两种方法。
2、传统手工超声无损检测方法需要操作人员在构件表面移动超声探头进行检测,这种扫查方式具有一定的灵活性,操作人员可以根据扫查工件的形状来规划各类扫查路线,尤其在复杂工件的超声无损检测方面,传统手工超声无损检测具有无可替代的优势,目前在对复杂工件的超声扫查中,传统手工检测方法占据重要地位。但在环境恶劣危及操作人员安全的工作场景下,如核工厂、化工厂中工件的无损检测,传统手工检测就无法使用。
3、机器人超声无损检测方法是在机械臂的末端安装超声探头扫查工件表面,可以在环境危险,操作人员无法现场检测的场景下使用。这种扫查方式可以使用程序来规划扫查轨迹,稳定可靠,但由于工作环境复杂和机器人规划算法的制约,目前只能在环境简单、形状相同的流水线工件上扫查使用。操作人员也可以通过控制机械臂示教器来控制机械臂运动,这种方式避免了机器人在扫查复杂工件时受规划算法制约的缺点,但是目前机械臂示教器仅具有沿x、y、z方向平移和绕x、y、z方向旋转的功能,不能在空间中灵活的控制机械臂沿着工件表面运动,增加了操作人员的操作难度。而且机械臂物理结构的约束,导致机械臂的扫查范围有限,当目标工件为大型复杂构件时,机械臂面临无法覆盖工件探伤范围的问题。
4、随着智能化技术的不断发展,遥操作技术可以将人类智能与机器人精准操作相结合,为远程操作领域提供了新思路。
技术实现思路
1、为了解决背景技术中在环境恶劣危及操作人员安全的工作场景下操作人员控制机械臂沿工件表面扫查困难和扫查范围有限的问题,本发明提供了一种移动式遥操作超声探伤系统及其使用方法,既实现了在复杂危险环境下远程操作机器人进行大范围的探伤运动,又保证了探伤过程中对机械臂的精准操作,简单高效。
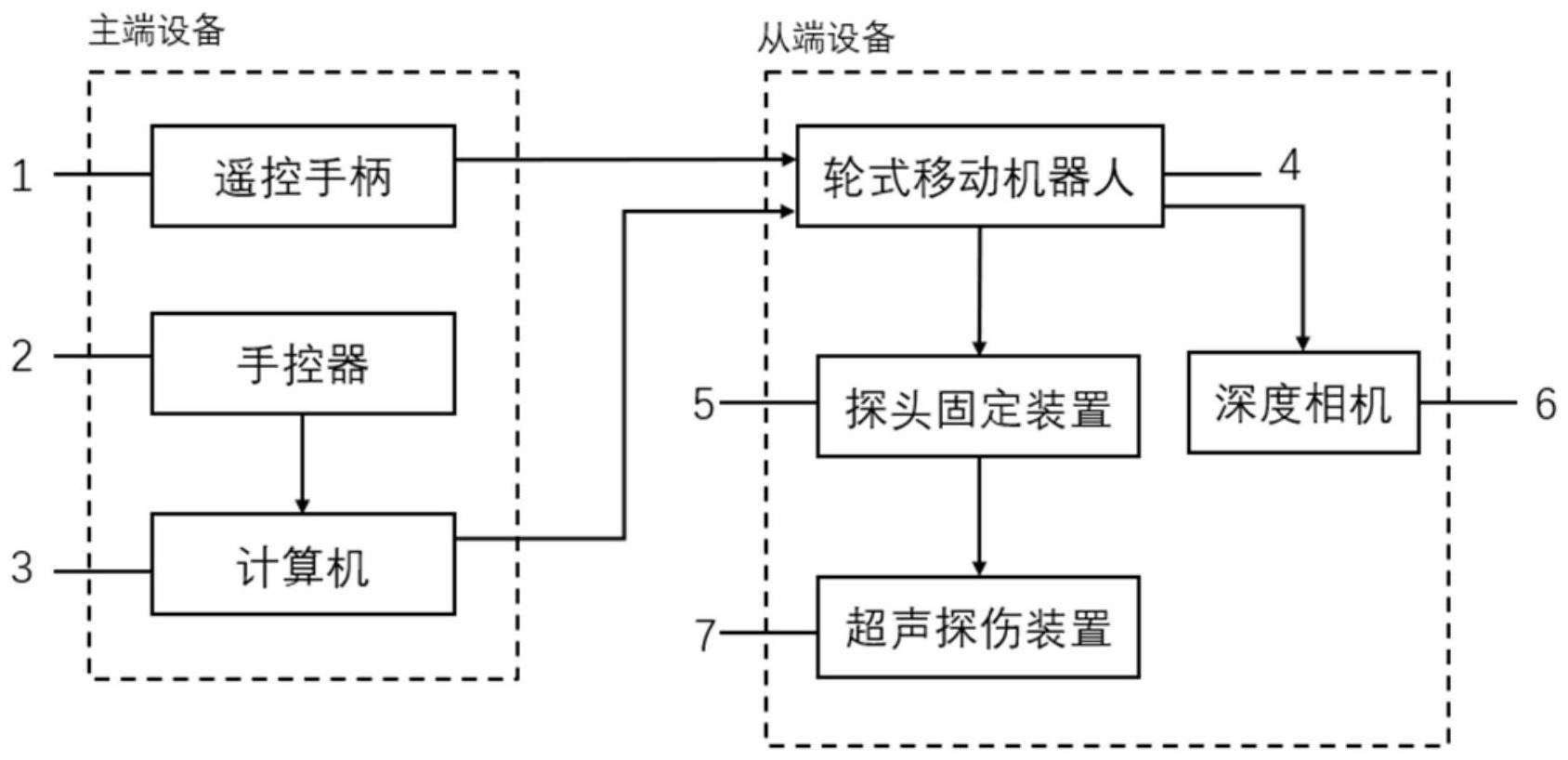
2、本发明采用如下技术方案:一种移动式遥操作超声探伤系统,包括主端设备和从端设备;
3、所述从端设备包括轮式移动机器人、探头固定装置、深度相机以及超声探伤设备;所述轮式移动机器人包括轮子、蓄电池、充当上位机的工控机、与工控机相连并控制轮子运动的下位机、机械臂以及控制机械臂运动的控制器;所述工控机接收主端设备的控制指令并将其发送给下位机;所述控制器接收主端设备的运动指令;所述探头固定装置安装于机械臂的末端,探头固定装置下部用于安装固定超声探伤设备,使得超声探伤设备固定在机械臂上用于对工件进行探伤;探头固定装置上还安装有深度相机,所述深度相机用于采集目标工件的三维点云信息;
4、所述主端设备包括遥控手柄、手控器、与手控器连接的计算机;所述遥控手柄与工控机进行无线通讯并发送控制指令控制轮式移动机器人移动;所述手控器与计算机相连接并将手控器在空间中的运动信息发送给计算机;所述计算机与轮式移动机器人进行通讯连接,计算机将手控器的运动信息进行解析,并将解析后的信息转换为运动指令发送给控制器;计算机还与超声探伤设备连接,用于接收并分析超声探伤设备采集到的超声信号。
5、作为本发明的优选方案,所述超声探伤设备为安装在探头固定装置上的超声探头。
6、作为本发明的优选方案,所述蓄电池将为轮式移动机器人整体提供电力。
7、作为本发明的优选方案,所述工控机根据接收到的遥控手柄的控制指令,工控机将控制指令转换为下位机能解析的信号并发送给下位机;下位机获取工控机发送的信号后控制轮式移动机器人的轮子运动。
8、作为本发明的优选方案,所述手控器通过usb与计算机相连接,手控器将其在空间中运动的运动信息发送给计算机,手控器的运动信息包括在三维工作空间中的位置信息和姿态信息;计算机解析得到机械臂要运动到的位置信息和姿态信息并生成运动指令,计算机将运动指令发送到轮式移动机器人的控制器,进而控制机械臂的末端运动调整到相应的位置和姿态。
9、作为本发明的优选方案,所述深度相机与探头固定装置相连接,在机械臂运动过程中获得目标工件的三维点云图像,计算机通过usb接口获取的三维点云图像后进行目标工件的三维重建,得到机械臂和目标工件间的相对位置关系,并通过计算机上的三维可视化平台展示机械臂和目标工件的位置,满足操作者视觉临场感的体验。
10、作为本发明的优选方案,所述超声探伤设备在贴合目标工件表面进行超声探伤的过程中,将超声探伤设备采集到的超声信号数据经usb接口传给计算机进行保存,探伤过程完成后,通过对超声探伤设备采集的数据进行分析来判断工件扫查区域是否有伤。
11、本发明还提供了一种所述的移动式遥操作超声探伤系统的使用方法,包括以下步骤:
12、1)根据工件形状和探伤区域大小以及机械臂的扫查范围,确定多个工件扫查位置;
13、2)控制遥控手柄发送控制指令到工控机,工控机接收到控制指令后将控制指令转换为下位机能解析的信号并发送给下位机,下位机获取信号后控制轮式移动机器人的轮子运动,使得轮式移动机器人移动到工件扫查位置,待轮式移动机器人移动到位后锁定轮式移动机器人的轮子;
14、3)轮式移动机器人移动到工件扫查位置后操纵手控器,手控器在空间中运动并将其在空间中运动的运动信息发送给计算机,计算机通过运行主从控制遥操作算法将手控器的运动信息进行解析,计算机将解析后的信息转换为运动指令发送给轮式移动机器人的控制器,进而控制机械臂运动;
15、4)在机械臂的运动过程中,深度相机采集目标工件三维点云信息并将信息发送给计算机,计算机利用采集到的点云信息进行目标工件的三维重建,并在计算机上的三维可视化平台中可视化展示机械臂和目标工件的相对位置关系;
16、5)操作手控器时观察计算机上的三维可视化平台,直至超声探伤设备贴合工件表面,继续移动手控器,完成机械臂可扫查范围内工件区域的探伤;
17、6)重复步骤2)~5)的操作对下一个工件扫查位置进行探伤,直至完成工件扫查位置的所有扫查。
18、与现有系统相比,本发明的有益效果是:
19、1)本发明将遥操作技术应用到工业在役设备远程运维巡检超声探伤技术领域,操作人员可以利用手控器控制机械臂同时进行多个方向的移动和旋转,使超声探头更容易沿着工件表面运动,简化了操作难度。
20、2)本发明根据工件的形状和大小确定多个扫查位置后,控制从端的轮式移动机器人逐一运动到各扫查位置,完成工件的大范围扫查探伤工作。同时在软件中可视化展示机械臂和目标工件的相对位置关系,满足操作者视觉临场感的体验。
21、3)本发明实施方便,实现了在复杂危险环境下远程操作机器人的大范围探伤运动,保证了探伤过程中对机械臂的精准操作,操作人员具有一定的操控舒适感。
- 还没有人留言评论。精彩留言会获得点赞!