一种车载角毫米波雷达位置标定装置及方法与流程
本发明属于雷达位置标定,具体涉及到一种车载角毫米波雷达位置标定装置及方法。
背景技术:
1、在自动驾驶车辆的行驶过程中,角毫米波雷达作为智能驾驶系统中重要的传感器之一,提供了车辆在行驶过程中,感知目标物的速度、距离等信息。
2、目前,智能重卡车辆的角毫米波雷达普遍安装在前后保的四个角位置,由于不同的角毫米波雷达具有不同的安装角度要求,现有的大型毫米波雷达标定设备,只能针对前向毫米波雷达进行水平、俯仰、横摆角位置的相关标定。在角毫米波雷达安装过程中,受到零部件尺寸链(雷达本体、安装支架、前后保险杠等以及安装误差)的影响,对目标物的感知距离、感知范围会产生较大的差异。以角毫米波雷达的有效感知距离100米为例,水平角误差每偏差1°,感知中心点距离实际目标点的偏差达到1.75米左右,同时也影响到了实际的感知区域,对于智能重卡的感知、规划及控制都不是很友好。因此在角毫米波雷达安装以及维修更换过程中,对于角毫米波雷达的系统化标定显得尤为重要,为智能重卡的行驶安全性提供有力的保障。
3、在智能驾驶重卡车辆用毫米波雷达的主要功能是给行驶过程中的重卡提供中远距离的周围环境的感知,包括运动中的车辆、行人、障碍物等距离、速度、位置等信息。
4、目前,不同智能驾驶等级(l2、l3、l4)的重卡车辆上,普遍安装3d毫米波雷达或者4d毫米波雷达,主要的安装位置处于车辆前后方保险杠的中间位置及左右两侧。其中,位于车辆左右两侧的毫米波雷达即角毫米波雷达,由于智能重卡车型及毫米波雷达型号的差异,对于角毫米波雷达达到的水平及垂直方向的视场角(fov)也存在一定的区别。因此,安装后角毫米波雷达的横摆角、水平角、俯仰角存在一定的要求;如果角毫米波雷达的横摆角存在偏差,会导致水平方向的fov相应的偏差,探测范围也会变化;如果角毫米波雷达的俯仰角存在偏差,会影响垂直方向fov,整个雷达的探测距离就会缩短,最终会影响整个智能重卡车辆对于周围环境的感知能力。因此对于角毫米波雷达位置的高精度标定、高质量检测显得尤为重要,可以保证智能重卡车辆智能驾驶感知水平的同时,更能够提高运行过程中的智能驾驶重卡车辆的安全系数。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种车载角毫米波雷达位置标定装置及方法,采用新型的标定装置进行角毫米波雷达的安装位置的标定,解决不同形状、不同类型的角毫米波雷达的标定的问题。
2、为了实现上述目的本发明采用如下技术方案:
3、一种车载角毫米波雷达位置标定装置,用于辅助测量车载角毫米波雷达的距离信息,并根据测量数值,调整待测角毫米波雷达的横摆角、俯仰角到车辆所需的位置,该标定装置包括轮毂固定装置、水平仪和激光测距仪组合;
4、所述的轮毂固定装置,安装固定在车辆一侧的车轮上,并通过水平仪调整至水平状态;
5、所述的激光测距仪组合,设置在轮毂固定装置的前端,与车辆该侧前部的角毫米波雷达建立坐标基准关系。
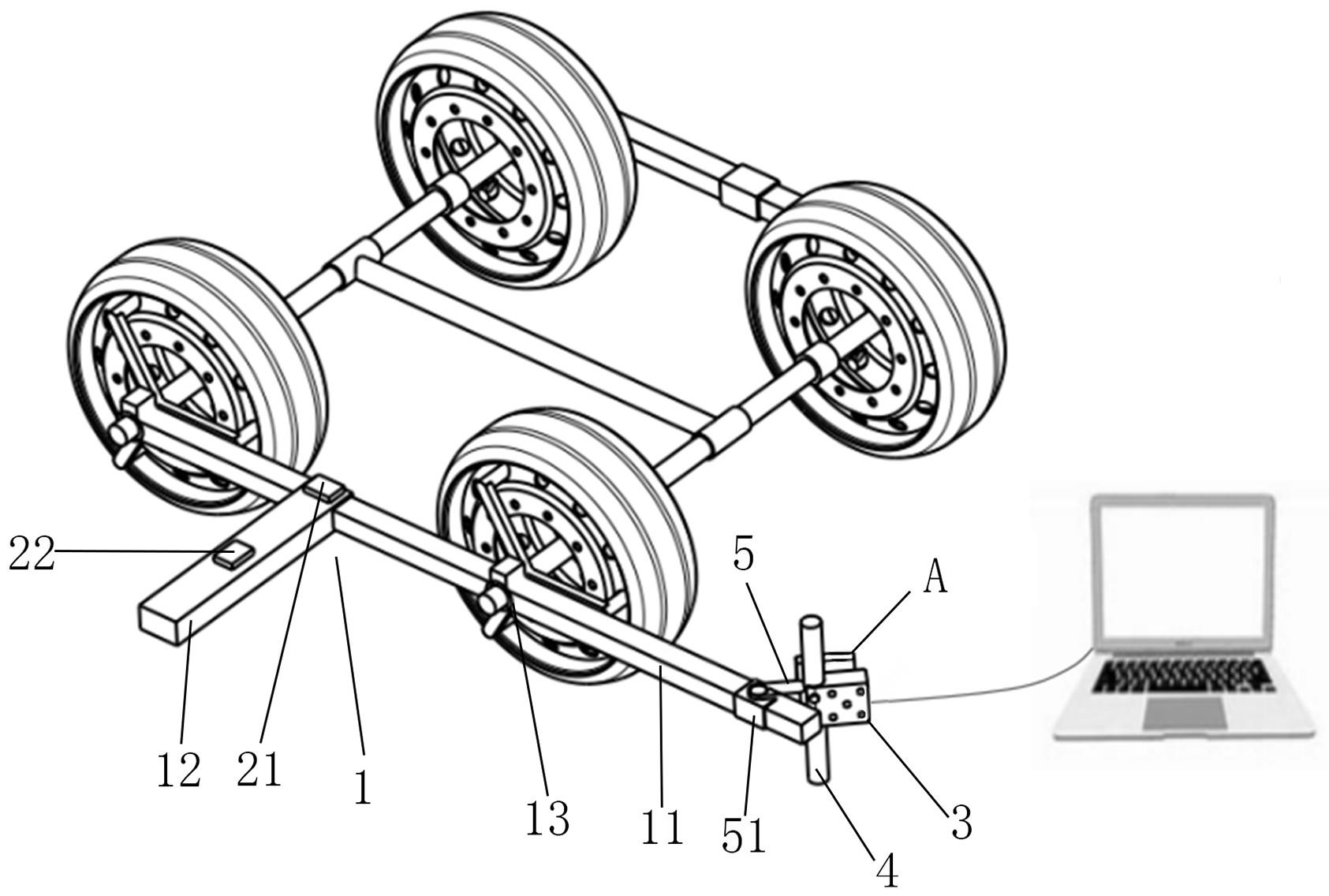
6、作为本发明的进一步描述,所述的轮毂固定装置包括x方向固定杆、y方向固定杆和设置在x方向固定杆上的轮毂夹具;
7、所述的轮毂夹具固定连接车轮的轮毂法兰,所述的x方向固定杆与所述的y方向固定杆之间垂直连接。
8、作为本发明的进一步描述,所述的水平仪包括x方向水平仪和y方向水平仪;所述的x方向水平仪设置在所述x方向固定杆与所述y方向固定杆的连接处,所述的y方向水平仪设置在所述y方向固定杆上。
9、作为本发明的进一步描述,所述x方向固定杆的前端还包括移动导轨,所述的激光测距仪组合设置在移动导轨上,并通过移动导轨进行调整。
10、作为本发明的进一步描述,所述的移动导轨包括上下移动导轨和横向移动导轨,所述的横向移动导轨一端通过滑动框与所述x方向固定杆配合,另一端连接所述上下移动导轨,所述的激光测距仪组合沿所述上下移动导轨上下滑动。
11、作为本发明的进一步描述,所述的滑动框套设在所述x方向固定杆的外周,且所述滑动框的外侧设置铰轴,所述的横向移动导轨通过铰轴与滑动框进行配合。
12、更进一步的,本发明的技术方案还包括一种车载角毫米波雷达位置标定方法,该方法基于上述的车载角毫米波雷达位置标定装置,具体包括如下步骤:
13、步骤1:将轮毂固定装置固定在车辆上;
14、步骤2:针对激光测距仪组合的位置进行调整;
15、步骤3:通过激光测距仪组合对车载角毫米波雷达的距离信息进行测量;
16、步骤4:根据激光测距仪组合的实测数值,调整车载角毫米波雷达的横摆角、俯仰角到所需的位置。
17、作为本发明的进一步描述,步骤1中,轮毂固定装置的具体固定方式包括如下步骤:
18、步骤1.1:轮毂固定装置的轮毂夹具,预固定在车轮的轮毂法兰;
19、步骤1.2:通过x方向水平仪和y方向水平仪,调整轮毂固定装置到水平位置,使得轮毂夹具与车辆一侧处于同一个坐标系中。
20、作为本发明的进一步描述,步骤2中,激光测距仪组合的位置调整为:通过横向移动导轨与上下移动导轨,针对激光测距仪组合进行调整,使激光测距仪组合位于车载角毫米波雷达的正前方。
21、作为本发明的进一步描述,步骤3中,激光测距仪组合对车载角毫米波雷达的距离信息进行测量,包括如下步骤:
22、步骤3.1:根据角毫米波雷达安装角度要求,通过角度测量仪设置激光测距仪组合的横摆角,使激光测距仪组合与待测角毫米波雷达处于同一安装角度;
23、步骤3.2:打开外部处理器和激光测距仪组合,通过激光测距仪发射的激光光速到角毫米波雷达表面,对被测角毫米波雷达的距离信息进行测量。
24、相对于现有技术,本发明的技术效果为:
25、本发明提供了一种车载角毫米波雷达位置标定装置及方法,主要作用是检测及调整智能驾驶重卡角毫米波雷达在安装过程中的位置、角度,以满足需求;该装置包括轮毂固定装置、水平仪和激光测距仪组合,具体是通过x方向水平仪和y方向水平仪便于针对轮毂固定装置到水平位置的调整,减少激光测距仪组合的安装角度误差,并使得轮毂夹具与车辆一侧处于同一坐标系中,便于激光测距仪组合与车辆这一侧前部的角毫米波雷达建立坐标基准关系,另外,结合上下移动导轨与横向移动导轨,调整激光测距仪组合的位置关系,便于获取角毫米波雷达的距离等空间位置信息,结构简单且易于实现,具有较强的实用价值,同时,该装置和方法可以适用于智能驾驶重卡车辆上不同形状、不同类型的角毫米雷达的标定需求。
技术特征:
1.一种车载角毫米波雷达位置标定装置,用于辅助测量车载角毫米波雷达的距离信息,并根据测量数值,调整待测角毫米波雷达的横摆角、俯仰角到车辆所需的位置,其特征在于:该标定装置包括轮毂固定装置、水平仪和激光测距仪组合;
2.根据权利要求1所述的一种车载角毫米波雷达位置标定装置,其特征在于:所述的轮毂固定装置包括x方向固定杆、y方向固定杆和设置在x方向固定杆上的轮毂夹具;
3.根据权利要求2所述的一种车载角毫米波雷达位置标定装置,其特征在于:所述的水平仪包括x方向水平仪和y方向水平仪;所述的x方向水平仪设置在所述x方向固定杆与所述y方向固定杆的连接处,所述的y方向水平仪设置在所述y方向固定杆上。
4.根据权利要求2所述的一种车载角毫米波雷达位置标定装置,其特征在于:所述x方向固定杆的前端还包括移动导轨,所述的激光测距仪组合设置在移动导轨上,并通过移动导轨进行调整。
5.根据权利要求4所述的一种车载角毫米波雷达位置标定装置,其特征在于:所述的移动导轨包括上下移动导轨和横向移动导轨,所述的横向移动导轨一端通过滑动框与所述x方向固定杆配合,另一端连接所述上下移动导轨,所述的激光测距仪组合沿所述上下移动导轨上下滑动。
6.根据权利要求5所述的一种车载角毫米波雷达位置标定装置,其特征在于:所述的滑动框套设在所述x方向固定杆的外周,且所述滑动框的外侧设置铰轴,所述的横向移动导轨通过铰轴与滑动框进行配合。
7.一种车载角毫米波雷达位置标定方法,其特征在于:该方法基于权利要求1-6任一项所述的车载角毫米波雷达位置标定装置,具体包括如下步骤:
8.根据权利要求7所述的一种车载角毫米波雷达位置标定方法,其特征在于:步骤1中,轮毂固定装置的具体固定方式包括如下步骤:
9.根据权利要求7所述的一种车载角毫米波雷达位置标定方法,其特征在于:步骤2中,激光测距仪组合的位置调整为:通过横向移动导轨与上下移动导轨,针对激光测距仪组合进行调整,使激光测距仪组合位于车载角毫米波雷达的正前方。
10.根据权利要求7所述的一种车载角毫米波雷达位置标定方法,其特征在于:步骤3中,激光测距仪组合对车载角毫米波雷达的距离信息进行测量,包括如下步骤:
技术总结
本发明公开一种车载角毫米波雷达位置标定装置及方法,该装置包括轮毂固定装置、水平仪和激光测距仪组合,轮毂固定装置通过X方向水平仪和Y方向水平仪的设置,便于调整到水平位置,减少激光测距仪组合的安装角度误差,并使得轮毂夹具与车辆一侧处于同一坐标系中,便于激光测距仪组合与车辆这一侧前部的角毫米波雷达建立坐标基准关系,另外,轮毂固定装置的X方向固定杆、轮毂夹具结合上下移动导轨与横向移动导轨,便于调整激光测距仪组合的位置关系,以此获取角毫米波雷达的距离等空间位置信息,该装置和方法可以适用于智能驾驶重卡车辆上不同形状、不同类型的角毫米雷达的标定需求。
技术研发人员:徐毅,孙浩,王帅
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!