自主驾驶传感器模拟的制作方法
本公开涉及自主驾驶模拟技术的领域,特别涉及提供能够针对非自主车辆角色(actor)相对地定义自主车辆的行动的模拟脚本的装置和方法。
背景技术:
1、自主驾驶车辆包括为了提供自主实时控制必须相互动作的大量的系统。在这些系统中,有被用于感知车辆的周围的对象物的传感器,根据该传感器,执行各种辨识以及意思决定任务。例如,传感器能够感知可能妨碍车辆的路径的对象物(如行人或者自行车等),能够生成针对该对象物的感知数据。感知数据被输入到自主驾驶车辆堆栈(autonomousdriving vehicle stack),自主驾驶软件能够检测并且追踪对象物,能够以避开障碍物的方式进行决定,能够影响控制。
2、自主驾驶模拟系统被用于开发自主驾驶应用并将其在自主软件堆栈中安全地展开。自主驾驶模拟系统包括为了提供用于测试开发中的应用的模拟而相互动作的工具或者模型的3个类别。
3、核心模拟器是制作、编辑、以及执行使模拟进行运转的脚本的主要模拟工具。能够经过核心模拟,与角色以及角色的活动一起,定义虚拟世界自身。例如,脚本为了测试自主车辆在这样的脚本中出现怎样的举动,能够包括在特别的轨道上以特别的速度移动的行人和非自主车辆。
4、车辆模拟器对自主车辆进行模拟。车辆模拟器包括(a)模拟出车辆的物理性的活动的车辆动力学模拟、(b)模拟出车辆的各种单元(如引擎、电池、空调机等)的车辆控制器或者单元模拟、以及(c)模拟出车辆主体的构成要素(如车灯、车门、警告灯等)的车辆主体模拟。
5、传感器模拟器模拟如照相机、激光雷达(lidar)传感器、雷达等那样的自主车辆的各种传感器。传感器模拟器例如输出被模拟的照相机图像。
6、如激光雷达传感器等那样的在自主驾驶系统中实现的主动式传感器通过发送光或者波(例如激光束)并接收在目标对象物的表面反射的该发送的光的反射来生成传感器数据。换言之,发送的光在对象物的表面反射,通过传感器接收,为了决定直至目标对象物的距离,测定在此期间花费的时间(time of flight)。
7、反射而返回到传感器的光线或者波是随机的,在目标对象物的表面具有大量的角度,由于凹凸、隆起等而复杂时特别显著。例如,行驶中的摩托车或者自行车的车轮包括具有圆筒形的表面的旋转着的辐条(或者金属线),其表面根据反射被发送的光的辐条的表面的点随机地反射出光。这提示着将传感器进行模拟时以及生成传感器数据时的问题。即,在制作模拟时,为了模拟各辐条中的所有多边形、以及被其反射的所有光或者波,需要大量的时间和运算的复杂性。高精度地实现这样的模拟时,大幅削减模拟速度和/或增加用于计算来自表面的各多边形的各反射的运算以及处理请求。
技术实现思路
1、与发明的概念匹配的装置和方法在提供精度依然良好的传感器模拟的同时,提供简化目标对象物的定义的模拟工具。即,模拟环境中的对象物通过其形状、尺寸、以及反射信息来定义。反射信息通过材质(例如定义光被如何反射)和纹理(例如颜色信息)定义。进而,反射率表格被用于将多个单纯对象物的定义与针对该对象物的反射率对应起来。
2、例如,在自行车的车轮的情况下,在模拟中使用的对象物的定义包括车轮的金属线或者辐条的数量、车轮的速度、以及自主车辆(或者其传感器)与车轮之间的角度。针对这些3个项目的值被输入到动态反射率表格,该表格提供这些值向动态反射率的三维对应。动态反射率表示传感器接收到的被反射的光线的率。根据实时测试数据样本来提供或者预先决定反射率表格。
3、根据作为例子的实施方式,根据反射信息(例如材质和/或纹理)准备多个不同的动态反射率表格。换言之,根据来自实际的测试的样本数据来准备各表格,该实际的测试是关于具有不同的反射信息的对象物被执行的。因此,本实施方式所涉及的传感器模拟器使用与针对对象物设定的反射材料质对应的动态反射率表格。
4、而且,从反射率表格输出的反射率被用于计算针对该目标对象物的点群(pointcloud)、例如激光雷达点群。根据实施方式,反射率和入射光线的数量被输入给计算光线点的随机点函数(例如3个反射或者入射的光线和反射率10%)。进而,使用用于生成点群的各种公知技术中的任意技术来计算或者决定各光线点的矢量和强度。
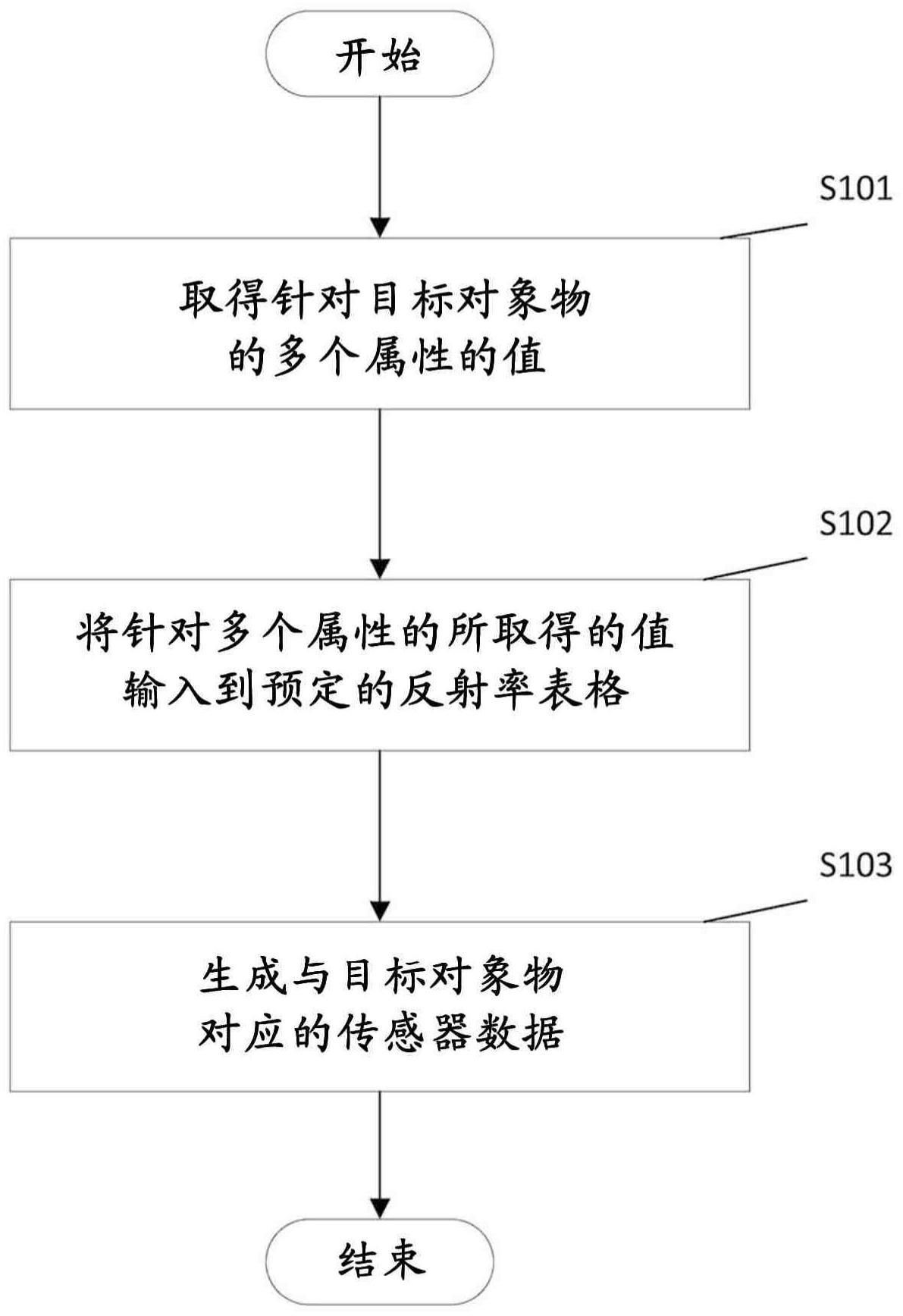
5、根据作为本公开的例子的实施方式,自主驾驶模拟器中的将传感器进行模拟的方法包括:在自主驾驶模拟中,取得通过传感器模拟器感知的针对目标对象物的多个属性的值,该传感器模拟器模拟向对象物输出光线并接收来自该对象物的光线的反射的主动式传感器;为了取得与取得的值对应起来的反射率,将针对多个属性的取得的值输入到预定的反射率表格;以及根据取得的反射率,生成与目标对象物对应的传感器数据,在此,目标对象物是车轮,多个属性具备自主驾驶模拟中的车轮辐条的数量、车轮的速度、以及车轮与自主车辆之间的角度。
6、作为例子的实施方式所涉及的方法还能够包括取得针对目标对象物定义的反射信息。反射信息能够包括目标对象物的反射表面的纹理和材质。
7、追加地,作为例子的实施方式所涉及的方法能够包括:将针对多个属性的值输入到预定的反射率表格;以及从与分别不同的反射信息对应的多个预定的反射率表格选择与取得的反射信息对应的预定的反射率表格。在预定的反射率表格中,能够根据用于与动态反射率对应起来的现实世界的反射率测试,预先决定针对目标对象物的多个属性的值。追加地,根据作为本公开的例子的实施方式,生成的传感器数据具备针对目标对象物的点群。
8、根据作为本公开的又一其他例的实施方式,生成传感器数据包括:为了计算光线点将取得的反射率以及入射的被反射的光线的数量输入到随机点函数;以及计算各光线点的矢量和强度。
9、根据作为本公开的其他例的实施方式,非临时性的计算机可读取的储存介质存储有为了执行方法而可由至少一个处理器执行的命令,方法包括:在自主驾驶模拟中,取得通过传感器模拟器感知的针对目标对象物的多个属性的值,该传感器模拟器模拟向对象物输出光线并接收来自该对象物的光线的反射的主动式传感器;为了取得与取得的值对应起来的反射率,将针对多个属性的取得的值输入到预定的反射率表格;以及根据取得的反射率,生成与目标对象物对应的传感器数据。目标对象物是车轮,多个属性是自主驾驶模拟中的车轮辐条的数量、车轮的速度、以及车轮与自主车辆之间的角度。
技术特征:
1.一种在自主驾驶模拟中对传感器进行模拟的方法,其特征在于,具备:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求2或者3所述的方法,其特征在于,
5.根据权利要求1~4中的任意一项所述的方法,其特征在于,
6.根据权利要求1~5中的任意一项所述的方法,其特征在于,
7.根据权利要求1~6中的任意一项所述的方法,其特征在于,
8.一种自主驾驶模拟器,其特征在于,具备:
9.根据权利要求8所述的自主驾驶模拟器,其特征在于,
10.根据权利要求9所述的自主驾驶模拟器,其特征在于,
11.根据权利要求9或者10所述的自主驾驶模拟器,其特征在于,
12.根据权利要求8~11中的任意一项所述的自主驾驶模拟器,其特征在于,
13.根据权利要求8~12中的任意一项所述的自主驾驶模拟器,其特征在于,
14.根据权利要求13所述的自主驾驶模拟器,其特征在于,
15.一种非临时性的计算机可读取的储存介质,为了执行方法而储存有可由至少一个处理器执行的命令,所述储存介质的特征在于,
技术总结
提供一种自主驾驶传感器模拟。在自主驾驶模拟中将传感器进行模拟的方法包括取得在自主驾驶模拟中通过传感器模拟器感知的针对目标对象物的多个属性的值。传感器模拟器能够模拟向对象物输出光线并接收来自该对象物的光线的反射的主动式传感器。方法还包括:为了取得与取得的值对应起来的反射率,将针对多个属性的取得的值输入到预定的反射率表格;以及根据取得的反射率,生成与目标对象物对应的传感器数据。
技术研发人员:孙林钰
受保护的技术使用者:织望丰田股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!