一种自动驾驶车辆的车道线实时地图生成方法及装置与流程
本发明涉及自动驾驶领域,尤其涉及一种自动驾驶车辆的车道线实时地图生成方法及装置。
背景技术:
1、随着自动驾驶技术在全球的迅速兴起,如何提升自动驾驶中的用户体验成为研究热点。在一些自动驾驶的应用场景中,虽然城市道路具有车道级导航,然而缺少高精度地图的全面覆盖,车辆车道级的行驶是根据由摄像头和激光雷达等传感器提供的道路车道线信息和周围的障碍物信息进行判断选择的。其中,车道线信息一般三次方程的形式接收,据以生成的地图是实时更新的,当车辆驶离当前地图范围时该地图信息就会被丢弃,下一帧的地图生成会依据历史地图信息进行实时地调整更新,车辆根据该更新地图进行实时的自动驾驶控制。
2、现有技术中自动驾驶的车辆选择一般是根据车道线的实际信息构建地图,或者是延伸某一侧的车道进行地图的拼接,然而,该些方案容易在车辆行驶过程中出现下面两类问题,一是车辆无法很快地选择驶入哪个车道,而在选择车道时又可能会发生压线或者可能与后车发生碰撞事故,另一方面,在选择车道的瞬间可能会因为车道的突变引起车辆方向盘的猛打现象,影响到车上乘客的用车体验。
3、为了克服现有技术存在的上述缺陷,本领域亟需一种自动驾驶车辆的车道线实时地图生成方法及装置,用于自动驾驶场景中的车道选择,在构建实时地图时增设了道路选择策略,再根据该策略选择行驶道路,同时对可能突变的车道线信息进行滤波处理后再构建实时地图,避免了车道中心线的突变,提升了用户的驾车体验。
技术实现思路
1、以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
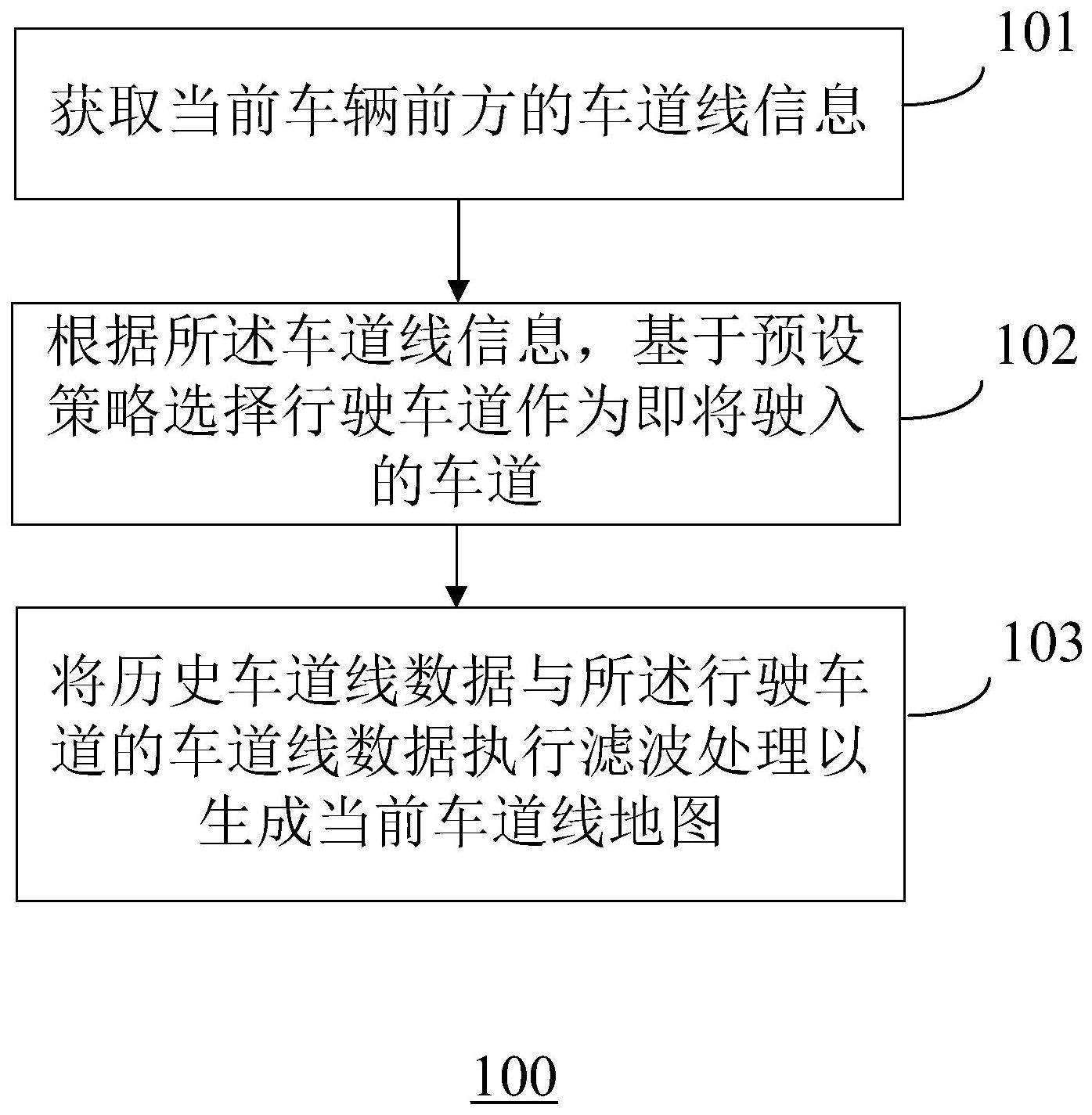
2、为了克服现有技术存在的上述缺陷,本发明提供了一种自动驾驶车辆的车道线实时地图生成方法,包括:获取当前车辆前方的车道线信息;根据该车道线信息,基于预设策略选择行驶车道作为即将驶入的车道;以及将历史车道线数据与该行驶车道的车道线数据执行滤波处理以生成当前车道线地图。
3、在一实施例中,优选地,该车道线信息包括车道线质量、当前车辆至该车道线的距离以及该车道线上前后方的障碍物信息,该基于预设策略选择行驶车道作为即将驶入的车道,包括:对多个该车道线信息加权以分别求取当前车辆前方每一条车道的权重值;以及基于该权重值选择该行驶车道。
4、在一实施例中,优选地,该获取当前车辆前方的车道线信息包括:获取当前车辆前方的左右两条车道的车道线信息;该对多个该车道线信息加权以分别求取当前车辆前方每一条车道的权重值,包括:基于以下公式分别计算前方左右两条车道的权重值:
5、wl=ql·w1+dl·w2+tlf·w3+tlb·w4
6、wr=qr·w1+dr·w2+trf·w3+trb·w4
7、其中,wl、wr分别为左右车道的该权重值,ql、qr分别为左右车道的该车道线质量,w1为该车道线质量的加权系数,dl、dr分别为当前车辆至左右车道上车道线的距离值,w2为该当前车辆至该车道上车道线的距离的加权系数,tlf、trf分别表征左右车道上前方的障碍物信息,w3为车道前方障碍物信息的加权系数,tlb、trb分别表征左右车道上后方的障碍物信息,w4为车道后方障碍物信息的加权系数。
8、在一实施例中,优选地,该车道线质量包括车道线清晰度和车道线在前后帧的连续度,该左右车道的该车道线质量ql、qr为分别在左右车道上对各自清晰度和连续度先进行加权计算而得的综合质量取值。
9、在一实施例中,优选地,该障碍物信息包括在对应车道上前后方的预设距离内分别是否存在障碍物,该预设距离基于当前车速与预设规划时间确定;基于以下公式分别计算前方左右两条车道的权重值,还包括:响应于对应车道上车辆前方的该预设距离内存在障碍物,该车道前方障碍物信息的加权系数取1,否则取0;以及响应于对应车道上车辆后方的该预设距离内存在障碍物,该车道后方障碍物信息的加权系数取-1,否则取0。
10、在一实施例中,优选地,该将历史车道线数据与该行驶车道的车道线数据执行滤波处理以生成当前车道线地图,包括:基于当前车速确定车道有效长度,在该车道有效长度内对车道线进行采样以获得车体坐标系下的车道线采样点的坐标值;以及基于以下公式执行该滤波处理:
11、y=y1·k+y2·(1-k)
12、其中,y为滤波处理后所生成的当前车道线采样点的纵坐标值,y1为该行驶车道的车道线采样点的纵坐标,y2为该历史车道线的采样点的纵坐标,k为滤波系数。
13、在一实施例中,优选地,该基于以下公式执行该滤波处理,还包括:基于该车道有效长度、当前该采样点横坐标与该车道有效长度的差值,以及当前车辆至该行驶车道的中心线的距离确定每个采样点的该滤波系数。
14、在一实施例中,优选地,该基于以下公式执行该滤波处理,还包括:基于以下公式确定每个车道线采样点的该滤波系数:
15、k=k1·k2·k3
16、其中,k1根据以下表格确定取值,l为该车道有效长度:
17、 l(m) 0 10 20 30 40 50 60 <![cdata[k<sub>1</sub>]]> 0.0 0.1 0.3 0.5 0.7 0.9 1.0
18、k2根据以下表格确定取值,δl为该当前该采样点横坐标与该车道有效长度的差值:
19、 δl(m) 0 10 20 30 40 50 60 <![cdata[k<sub>2</sub>]]> 1.0 0.9 0.7 0.5 0.3 0.1 0.0
20、本发明的另一方面还提供了一种自动驾驶车辆的车道线实时地图生成装置,包括:存储器;以及与该存储器耦接的处理器,该处理器配置用于执行上文中任一项所描述的自动驾驶车辆的车道线实时地图生成方法。
21、本发明还提供了一种计算机可读介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上文中任一项所描述的自动驾驶车辆的车道线实时地图生成方法。
- 还没有人留言评论。精彩留言会获得点赞!