一种基于线加速度计的望远镜俯仰轴角度实时解算方法
本发明涉及地基式望远镜跟踪控制,具体涉及一种基于线加速度计的望远镜俯仰轴角度实时解算方法。
背景技术:
1、在地基式望远镜精密跟踪控制系统中,出于系统设计的需要,编码器采集板卡无法保存零位修正值,另外软件自启后通过网口发送零位修正指令时,由于使用的是具有三层协议功能的交换机,比操作软件启动时间要慢。这样,有时就会出现无法正常进行零位修正的现象,望远镜就无法正常工作,这不仅给操作人员带来麻烦,也给跟踪控制带来了困难。
2、目前在进行正倒镜修误差前的方法时:操作人员步行至设备旁,先观察俯仰轴所处的位置,然后将设备转动为正镜的水平位置,最后步行到操作台,将此时俯仰轴编码器角度修为0度,再拍正倒镜进行误差修正。
3、由于此方法要在需要操作人员步行至设备旁,在实际工作中增加操作人员的工作量,使工作效率非常低;同时在实际工作中,在将设备转动为正镜的水平位置,还需要操作人员具有对设备正倒镜的识别能力,需要进行相关培训,同时耗费大量的人力以及宝贵的时间,无法实现自动化处理。
4、随着在跟踪控制的技术发展,对设备的自动化流程要求日益苛刻,因此对零位修正提出了更高的要求;同时对于试验期间的系统,每次执行任务前,都需要在外场通过拍正倒镜进行误差修正,从而保证任务顺利执行。因此需要一种适应能力强,对环境和辅助条件要求低的自动化处理的解算方法。现有的方法在效率和自动化两方面都难以满足要求。
技术实现思路
1、本发明的目的在于提供一种基于线加速度计的望远镜俯仰轴角度实时解算方法,用于望远镜俯仰轴编码器数据有误时及时告警,并给出望远镜大致的角度信息。
2、本发明采用的技术方案为:一种基于线加速度计的望远镜俯仰轴角度实时解算方法,具有以下步骤:
3、步骤(1)、第一加速度计100-a、第二加速度计100-b对称安装在望远镜转台101上面,与转台固联,两个加速度计离旋转中心的距离相同、敏感方向相同,敏感方向为转台旋转的切线方向;
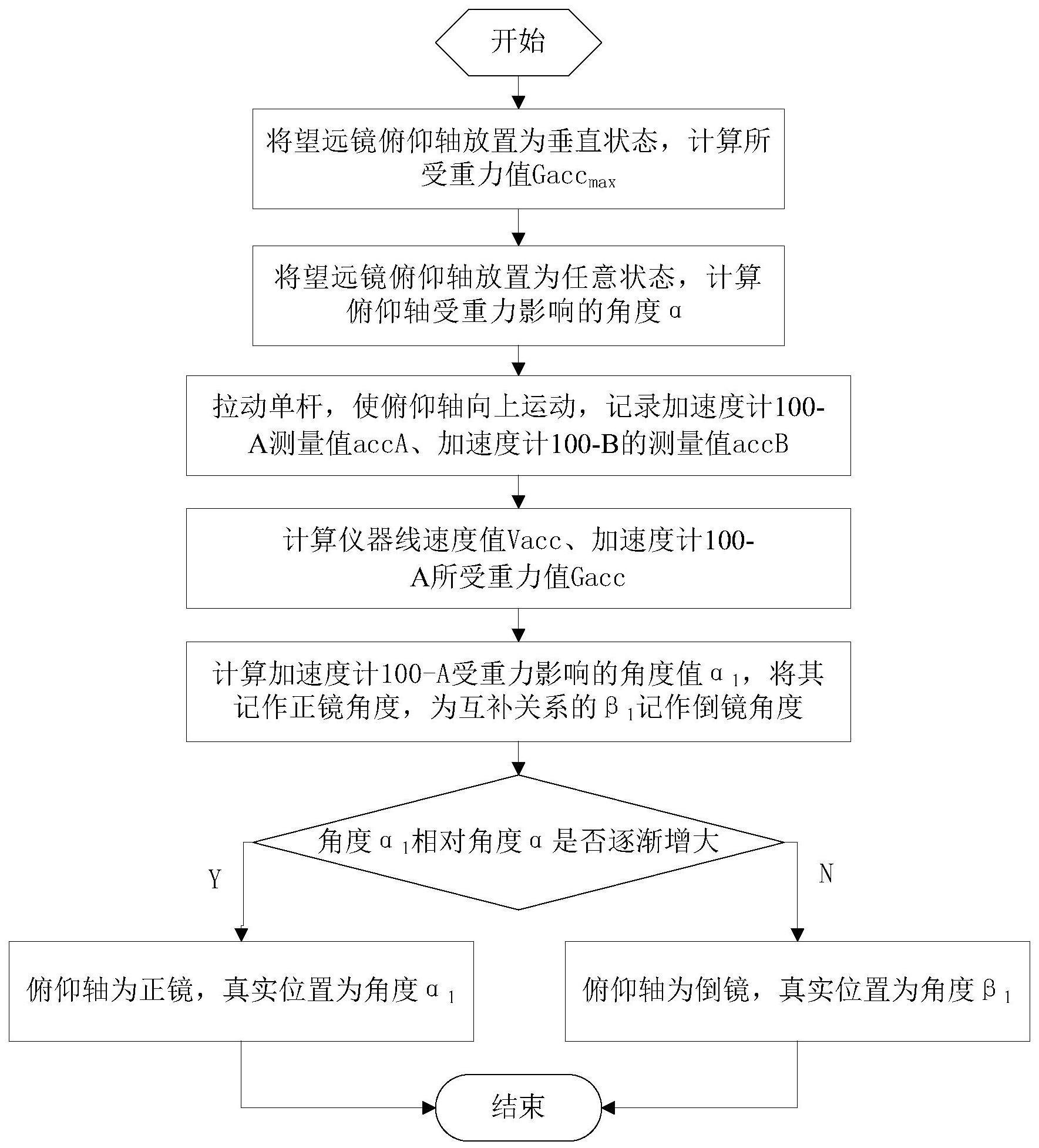
4、步骤(2)、将望远镜俯仰轴放置为垂直状态,记录第一加速度计100-a测量值accamax,将其作为所受重力值gaccmax;
5、步骤(3)、将望远镜俯仰轴放置为任意状态,记录第一加速度计100-a测量值acca,用所述重力值计算俯仰轴受重力影响的角度α;
6、步骤(4)、拉动单杆,使俯仰轴向上运动,记录第一加速度计100-a测量值acca、第二加速度计100-b的测量值accb,计算仪器线速度值vacc、第一加速度计100-a所受重力值gacc;
7、步骤(5)、利用所述第一加速度计100-a所受重力值gacc、gaccmax之间的反正弦关系计算第一加速度计100-a受重力影响的角度值α1;
8、步骤(6)、望远镜俯仰轴存在正倒镜情况,将所述角度值α1记作正镜角度,为互补关系的β1记作倒镜角度;
9、步骤(7)、若所述角度值α1相对角度α逐渐增大,则设备为正镜,俯仰轴真实角度为α1,否者设备为倒镜,俯仰轴真实角度为β1。
10、进一步地,步骤(2)中,当望远镜俯仰轴放置垂直状态时,第一加速度计100-a受到的重力为最大重力,其重力值与测量值相等,此状态仅标定一次即可。
11、进一步地,步骤(3)中,当设备处于静止状态时,第一加速度计100-a测量值acca为所受最大重力在敏感方向上的投影,利用反正弦函数可以解得受重力影响的角度。
12、进一步地,步骤(4)中,当设备处于运动状态时,先将设备的线速度剥离出来,再计算加速度计所受重力值。
13、进一步地,步骤(5)中,当设备处于运动状态时,同步骤(2)实时解得加速度计在不同位置受重力影响的角度值。
14、进一步地,步骤(6)中,由于望远镜俯仰轴存在正倒镜的情况,所以计算得到的角度可能为正镜,也可能为倒镜,正镜与倒镜的角度为互补关系。
15、进一步地,步骤(7)中,这里拉动单杆使俯仰轴向上抬起,若望远镜处于正镜位置,角度逐渐增大;若望远镜处于倒镜位置,角度逐渐减小。由此得到望远镜正倒镜信息,从而得到真实的俯仰轴角度。
16、本发明与现有技术相比的优点在于:
17、(1)本发明根据加速度计的测量值解算得到望远镜俯仰轴实时角度,避免了与望远镜编码器产生关联,计算过程简单且易于实现。
18、(2)本发明可以解决之前操作人员到设备旁边观察和手工操作的耗时耗力问题,使工作流程自动化、简捷化。
19、(3)本发明可以在望远镜任意方位对俯仰轴角度进行实时解算,所需条件限制少、适应性强、解算速度快。
技术特征:
1.一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:该方法具有以下步骤:
2.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(2)中,当望远镜俯仰轴放置垂直状态时,第一加速度计(100-a)受到的重力为最大重力,其重力值与测量值相等,此状态仅标定一次即可。
3.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(3)中,当设备处于静止状态时,第一加速度计(100-a)测量值acca为所受最大重力在敏感方向上的投影,利用反正弦函数可以解得受重力影响的角度值。
4.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(4)中,当设备处于运动状态时,先将设备的线速度剥离出来,再计算加速度计所受重力值。
5.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(5)中,当设备处于运动状态时,同步骤(2)实时解得加速度计在不同位置受重力影响的角度值。
6.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(6)中,由于望远镜俯仰轴存在正倒镜的情况,所以计算得到的角度可能为正镜,也可能为倒镜,正镜与倒镜的角度为互补关系。
7.根据权利要求1所述的一种基于线加速度计的望远镜俯仰轴角度实时解算方法,其特征在于:步骤(7)中,这里拉动单杆使俯仰轴向上抬起,若望远镜处于正镜位置,角度逐渐增大;若望远镜处于倒镜位置,角度逐渐减小,由此得到望远镜正倒镜信息,从而得到真实的俯仰轴角度。
技术总结
本发明公开了一种基于线加速度计的望远镜俯仰轴角度实时解算方法。具体步骤为:首先将望远镜俯仰轴放置为垂直状态和其它任意状态,分别记录线加速度计测量值并计算所受重力值;然后利用所受重力值之间的反正弦关系得到受重力影响的角度值,由于实际系统存在正倒镜情况,所以通过向正方向拉动单杆,对比所受重力影响的角度值确定望远镜正倒镜状态,从而得到俯仰轴真实角度。本发明的方法计算速度快、易于实现、性能稳定,能够在望远镜俯仰轴编码器数据有误时及时告警,并给出望远镜大致的角度信息。
技术研发人员:王愿康,张桐,邓舒蔚,彭超,黄永梅,刘翔
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!