一种半球谐振陀螺谐振子与平面电极基座装配方法及装置
本发明涉及惯性传感器,具体涉及一种半球谐振陀螺谐振子与平面电极装配方法及装置。
背景技术:
1、半球谐振陀螺是一种基于哥式效应的固体波动陀螺,它具有高精度、高可靠、结构简单,体积小、质量轻等综合优势,在深空探测、卫星稳定控制、航天器导航、石油钻探、航海等领域具有广阔的应用前景。目前,在卡西尼号土星探测器、深度撞击号彗星探测器等多种航天器中,都有半球谐振陀螺的应用,并且取得了巨大的成功。
2、半球谐振陀螺有三件套结构和两件套结构。在三件套结构hrg中,陀螺表头有内外两个基座,安装时容易带来装配误差,该误差极大的限制了陀螺的良品率和产量,使得hrg很难进行批量生产和应用。两件套结构hrg的表头只有一个基座,最大限度减少了装配过程中可能出现的误差,提高了陀螺的精度。此外,在两件套结构的hrg中又分为球面电极构型和平面电极构型。平面电极hrg相比球面电极hrg的结构更简单、更紧凑,制造和装配难度降低,具有更广泛的发展前景。
3、谐振子和读出基座装配误差直接影响hrg的工作精度。在理想状态下,谐振子的支撑杆应该与读出基座同轴,此时谐振子下表面距离基座上任一平板电极的距离均相同且正对面积相同,不会产生任何误差。然而,当谐振子相对读出基座朝某一方向移动或者略微倾斜时,谐振子会相对读出基座有小位移旋量。减少谐振子装配时的小位移旋量是保证半球谐振陀螺仪高精度性能的关键技术,直接影响了hrg的品质因数以及驱动和检测精度等。所以,对陀螺仪表头的装配小位移旋量进行分析,确定其大小是十分必要的。当确定谐振子和平面电极的小位移旋量后,利用高精密多自由度位移台调整谐振子至标准位置,可提高半球谐振陀螺装配精度。综上所述,开展谐振子和平面电极之间的小位移旋量的确定方法,以及基于该方法研制半球谐振陀螺的装配装置,对推动我国高精度半球谐振陀螺的研究具有重要意义。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种实现平面电极结构半球谐振陀螺与电极基座之间位置偏移和倾斜的高精度计算方法与调整装置。能够实现半球谐振陀螺与电极基座之间位置偏移和倾斜的高精度计算与调整,满足高精度半球谐振陀螺研制要求。
2、本发明解决其技术问题是采取以下技术方案实现的:
3、一种半球谐振陀螺谐振子与平面电极基座装配方法,包括:
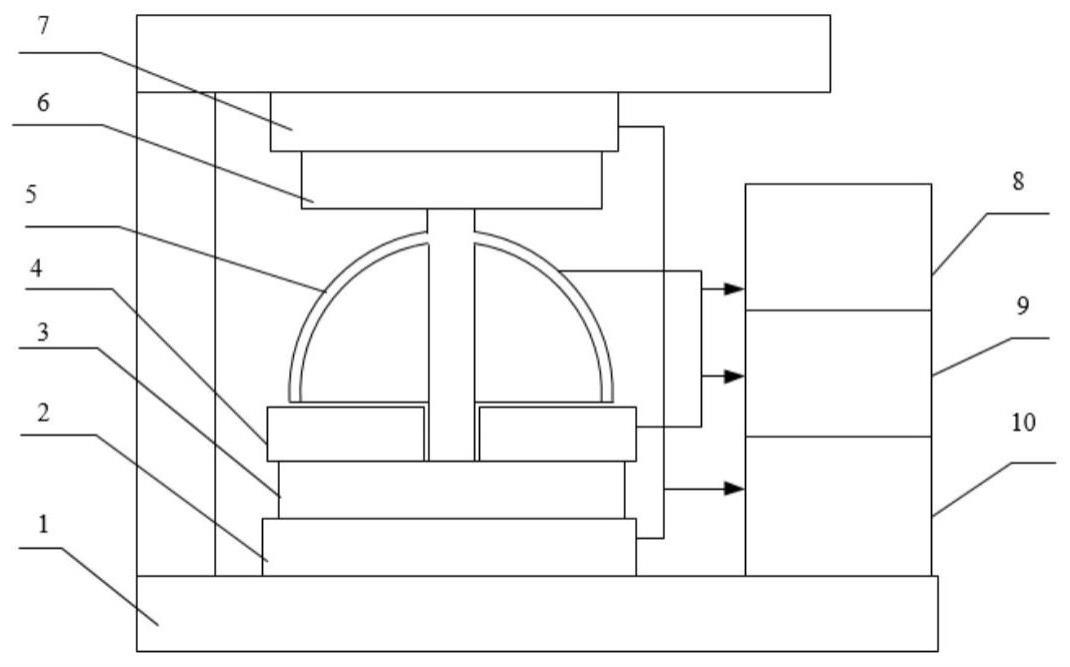
4、平面电极式半球谐振陀螺精密装配装置,其特征在于:包括谐振子固定装置、读出基座固定装置、差分式电容检测装置、高精密多自由度位移台、大理石平台、控制机、小位移旋量计算装置。
5、所述高精密多自由度位移台的定位精度优于0.1微米,调整分辨率优于0.1微米。
6、所述差分式电容检测装置的测量精度为飞法级。
7、谐振子固定装置、电极基座固定装置是用于安装和加持谐振子和读出基座。
8、上下两个高精密多自由度位移台用于调整谐振子和电极基座的位置。
9、差分式电容检测装置用于实时测量谐振子和电极基座之间的电容,并作为调平的依据。
10、小位移旋量计算装置用于计算谐振子位姿误差。
11、控制机,与所述差分式电容检测装置和所述小位移旋量计算装置以及所述高精密多自由度位移台连接。
12、在调整阶段,所述小位移旋量计算装置根据所述差分式电容检测装置测量的各个电容值计算出半球谐振陀螺的装配位姿误差。
13、进一步的,所述控制机根据小位移旋量计算出的半球谐振陀螺位姿误差调整所述的高精密多自由度位移台。
14、构建平面电极结构半球谐振陀螺的空间方程;所述空间方程包括有小位移旋量的谐振子空间平面方程和标准电极基座空间平面方程;
15、对标准状态下平面电极式半球谐振陀螺中谐振子空间平面方程进行平移和旋转,得到有小位移旋量的谐振子空间方程;
16、根据有小位移旋量的谐振子空间平面方程和标准电极基座空间平面方程计算不同误差状态下谐振子和平面电极基座之间的电容。
17、平面电极式半球谐振陀螺在标准状态下的谐振子空间平面方程为:
18、z=0(r2≤x2+y2≤r2);
19、平面电极式半球谐振陀螺在标准状态下的平面电极基座空间平面方程为:
20、z=-0.1(r2≤x2+y2≤r2);
21、其中,r为唇沿内圆半径、r为唇沿外圆半径。
22、标准状态下谐振子下边缘平面的某一法向量上的点a的坐标,对该点进行齐次变换:a'=h·a=t(δx,δy,δz)·rot(x,δα)·rot(y,δβ)·rot(z,δγ)·a
23、变换后a’(m,n,p)即为坐标变换后,a点在参考坐标系下的坐标。坐标变换后谐振子下边缘平面的法向量为(m-δx,n-δy,p-δz),且该平面过定点(δx,δy,δz),因此可得有位姿误差的谐振子下边缘平面方程为:
24、(m-δx)·(x-δx)+(n-δy)·(y-δy)+(p-δz)·(z-δz)=0(r2≤x'2+y'2≤r2)
25、其中,x,y的范围在o’x’y’z’坐标系中约束。
26、根据有小位移旋量状态下的谐振子空间平面方程和标准状态下平面电极基座平面方程计算误差状态下谐振子与平面电极基座之间的电容,
27、确定任一小位移旋量状态为当前小位移旋量状态
28、根据当前小位移旋量状态谐振子空间平面方程和标准状态下平面电极基座空间平面方程,利用公式确定谐振子与平面电极之间的有效面积。
29、根据所述有效面积和公式确定当前小位移旋量状态下谐振子与平面电极基座之间的电容;
30、其中,s表示有效面积,dxy为谐振子唇沿在xoy平面上的投影,c为电容,ε为介电常数。
31、根据当前小位移旋量状态谐振子和标准状态下平面电极基座所计算出的电容模型,可计算出任一小位移旋量状态谐振子和标准状态下平面电极基座之间的电容。
32、以多个误差状态的电容为输入,多个误差状态的谐振子的小位移旋量为输出,对基于遗传算法的bp神经网络模型进行训练,得到当前谐振子的小位移旋量。
33、将当前谐振子的小位移旋量值取相反数,可得到谐振子调整到标准状态的调整值。
34、较现有技术相比,本发明具有以下的优点:
35、1.本发明提供的半球谐振陀螺谐振子与平面电极基座装配方法及装置,通过建立半球谐振陀螺的小位移旋量和各个电容之间的数学模型,得到任一小位移旋量和各个电容之间的对应关系。基于遗传算法的bp神经网络模型以多组电容值为输入,多组小位移旋量为输出建立各个电容和小位移旋量之间的映射关系。将粗装配时差分式电容检测装置测得的一组电容值输入小位移旋量计算装置即可得出谐振子的调整量,利用控制机控制高精密多自由度位移台调整谐振子的小位移旋量,由此可实现两件套结构半球谐振陀螺的精密装配。
36、2.本发明提供的半球谐振陀螺谐振子与平面电极基座装配方法及装置,可以解决传统半球谐振陀螺主要依靠工人的装配方式,实现了半球谐振陀螺的自动化装配,降低工作人员操作水平,提高装配效率和精度。
- 还没有人留言评论。精彩留言会获得点赞!