自动驾驶车辆的融合定位方法、装置及电子设备与流程
本技术涉及自动驾驶,尤其涉及一种自动驾驶车辆的融合定位方法、装置及电子设备。
背景技术:
1、自动驾驶场景下,需要实现自动驾驶车辆的高精度定位,目前通常采用多传感器融合定位的方式,即通过卡尔曼滤波器融合多个传感器采集的定位信息,从而实现车辆的高精度定位。例如,现有技术中的一种融合定位方案是基于imu(inertial measurementunit,惯性测量单元)和rtk(real-time kinematic,实时差分定位)实现的融合定位方案。
2、但此种方案在自动驾驶车辆遇到城市、峡谷、隧道等场景时,rtk会受到干扰或者无信号导致无法工作,尤其是在长隧道工况,无法得到高精度的定位信息。
3、常用的解决方案是加入激光slam(simultaneous localization and mapping,同步定位与建图)的定位结果进行融合定位,但激光slam自身输出的定位结果通常存在一定程度的延迟,直接以此进行融合将可能导致定位异常,系统报警,进而增加了人工接管率。
技术实现思路
1、本技术实施例提供了一种自动驾驶车辆的融合定位方法、装置及电子设备,以提高自动驾驶车辆的定位稳定性和定位精度。
2、本技术实施例采用下述技术方案:
3、第一方面,本技术实施例提供一种自动驾驶车辆的融合定位方法,其中,所述方法包括:
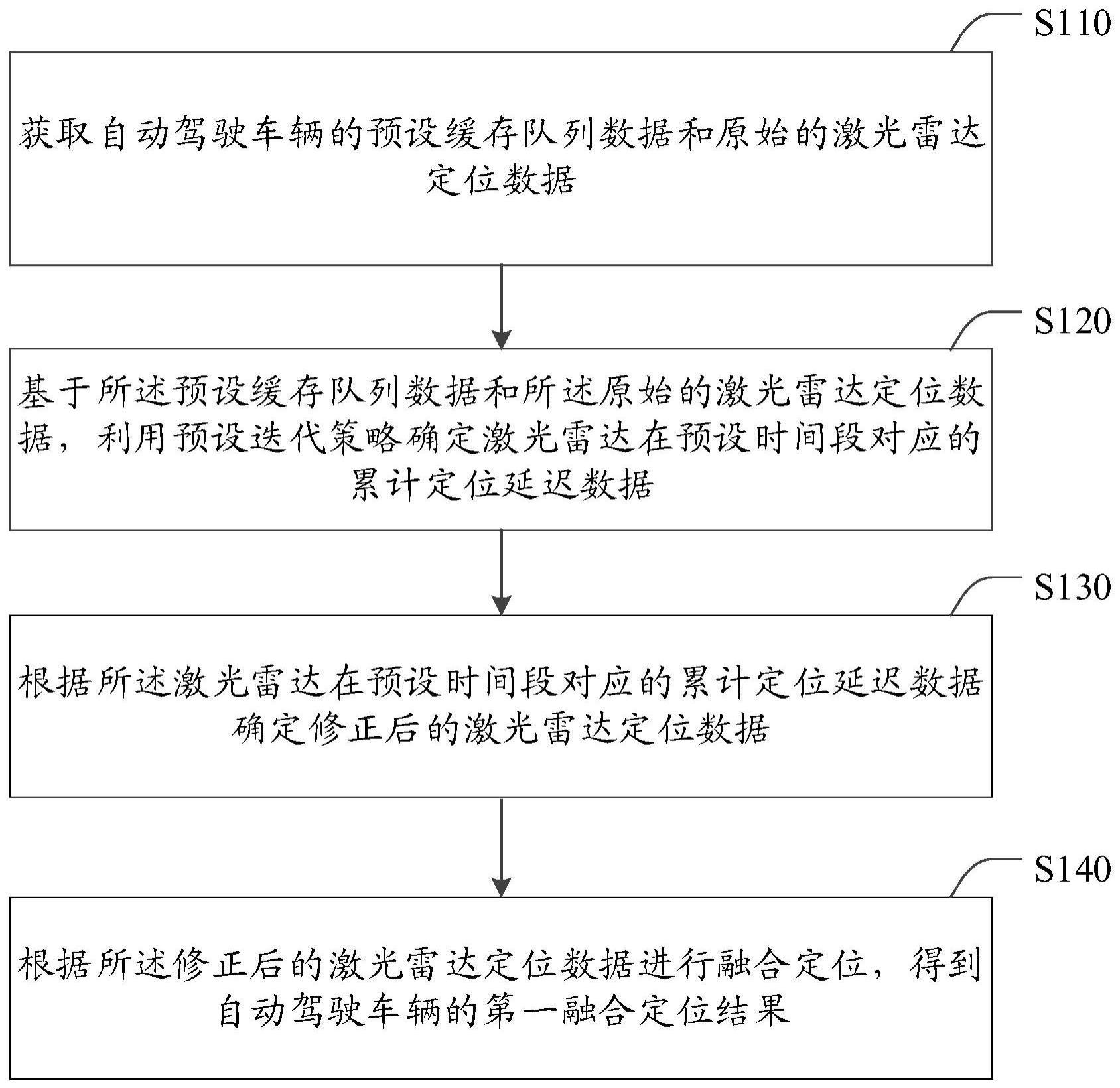
4、获取自动驾驶车辆的预设缓存队列数据和原始的激光雷达定位数据;
5、基于所述预设缓存队列数据和所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据;
6、根据所述激光雷达在预设时间段对应的累计定位延迟数据确定修正后的激光雷达定位数据;
7、根据所述修正后的激光雷达定位数据进行融合定位,得到自动驾驶车辆的第一融合定位结果。
8、可选地,所述预设缓存队列数据包括多个第一时间戳,所述原始的激光雷达定位数据包括第二时间戳,所述基于所述预设缓存队列数据和所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据包括:
9、确定所述预设缓存队列数据中是否存在与所述第二时间戳的差值小于预设时间差阈值的目标第一时间戳;
10、若存在,则基于所述预设缓存队列数据和所述目标第一时间戳以及所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据;
11、若不存在,则舍弃所述原始的激光雷达定位数据。
12、可选地,所述预设缓存队列数据还包括轮速,所述基于所述预设缓存队列数据和所述目标第一时间戳以及所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据包括:
13、根据所述预设缓存队列数据确定当前时刻对应的前一时刻的第一时间戳;
14、根据所述前一时刻的第一时间戳和所述目标第一时间戳确定所述预设时间段;
15、利用预设轮速修正策略对所述预设时间段内的各个第一时间戳对应的轮速进行修正,得到所述预设时间段内的修正后的轮速;
16、根据所述预设时间段内的修正后的轮速以及所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据。
17、可选地,所述预设缓存队列数据还包括航向角,所述根据所述预设时间段内的修正后的轮速以及所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据包括:
18、确定所述预设时间段内的所有相邻两个第一时间戳之间的时间差;
19、基于所述原始的激光雷达定位数据,利用所述预设时间段内的各个第一时间戳对应的修正后的轮速和航向角、所述预设时间段内的所有相邻两个第一时间戳之间的时间差进行迭代计算,得到所述激光雷达在预设时间段对应的累计定位延迟数据。
20、可选地,所述原始的激光雷达定位数据包括激光雷达的横向定位位置和纵向定位位置,所述基于所述预设缓存队列数据和所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据包括:
21、基于所述预设缓存队列数据和所述激光雷达的横向定位位置,利用预设迭代策略确定激光雷达在预设时间段对应的横向累计定位延迟位置;
22、基于所述预设缓存队列数据和所述激光雷达的纵向定位位置,利用预设迭代策略确定激光雷达在预设时间段对应的纵向累计定位延迟位置。
23、可选地,所述修正后的激光雷达定位数据为当前时刻对应的前一时刻的激光雷达定位数据,所述方法还包括:
24、确定激光雷达的定位预测时间;
25、根据所述修正后的激光雷达定位数据以及所述激光雷达的定位预测时间和所述预设缓存队列数据,确定当前时刻的预测的激光雷达定位数据;
26、根据当前时刻的预测的激光雷达定位数据进行融合定位,得到自动驾驶车辆的第二融合定位结果。
27、可选地,所述根据所述修正后的激光雷达定位数据以及所述激光雷达的定位预测时间和所述预设缓存队列数据,确定当前时刻的预测的激光雷达定位数据包括:
28、根据所述预设缓存队列数据确定所述定位预测时间对应的修正后的轮速和航向角;
29、根据所述激光雷达的定位预测时间以及对应的修正后的轮速和航向角,确定当前时刻的定位预测距离;
30、根据所述修正后的激光雷达定位数据和所述当前时刻的定位预测距离,确定当前时刻的预测的激光雷达定位数据。
31、第二方面,本技术实施例还提供一种自动驾驶车辆的融合定位装置,其中,所述装置包括:
32、获取单元,用于获取自动驾驶车辆的预设缓存队列数据和原始的激光雷达定位数据;
33、第一确定单元,用于基于所述预设缓存队列数据和所述原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据;
34、修正单元,用于根据所述激光雷达在预设时间段对应的累计定位延迟数据确定修正后的激光雷达定位数据;
35、第一融合定位单元,用于根据所述修正后的激光雷达定位数据进行融合定位,得到自动驾驶车辆的第一融合定位结果。
36、第三方面,本技术实施例还提供一种电子设备,包括:
37、处理器;以及
38、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行前述之任一所述方法。
39、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行前述之任一所述方法。
40、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:本技术实施例的自动驾驶车辆的融合定位方法,先获取自动驾驶车辆的预设缓存队列数据和原始的激光雷达定位数据;然后基于预设缓存队列数据和原始的激光雷达定位数据,利用预设迭代策略确定激光雷达在预设时间段对应的累计定位延迟数据;之后根据激光雷达在预设时间段内产生的累计定位延迟误差对原始的激光雷达定位数据进行修正,得到修正后的激光雷达定位数据;最后根据修正后的激光雷达定位数据进行融合定位,得到自动驾驶车辆的第一融合定位结果。本技术实施例的自动驾驶车辆的融合定位方法利用预设迭代策略对激光slam在一段时间内的累计定位延迟误差进行估计,以此修正激光slam的定位结果,从而为自动驾驶车辆的融合定位提供了更准确的观测信息,提高了定位稳定性和定位精度,且适用于更多复杂道路场景。
- 还没有人留言评论。精彩留言会获得点赞!