一种磁编码器故障检测方法、装置、电子设备和存储介质与流程
本发明涉及电机控制领域,具体涉及一种磁编码器故障检测方法、装置、电子设备和存储介质。
背景技术:
1、在无人机领域中,有些应用场景下对动力套的响应性能要求较高,而使用无位置传感器在控制快速动态响应的情况下会存在失步,所以可快速响应的动力套一般都会采用有感控制来避免这个问题,有感控制即通过有感传感器(如磁编传感器)去检测电机轴向磁场从而获得电机的位置,但在使用过程中,电机的轴向磁铁由于制作工艺的限制,长时间运行后少部分磁铁勋在脱落情况,会引起磁编码器存在工作异常或是失效的情况,最终导致获取的角度信息出现异常而使得控制出错,最终影响无人机的控制效果。
2、所以如何更高效、准确地解决有感传感器异常带来的无人机动力异常问题,是待解决的技术问题。
技术实现思路
1、基于此,本发明针对上述问题,提供了一种磁编码器故障检测方法、装置、电子设备和存储介质,本发明在有感控制中加入无感控制来共同控制磁编器的角度冗余,当检测到有感检测失效时,系统就切入无位置传感器来控制磁编码器的角度冗余,可以有效解决无人机的动力异常问题。
2、第一方面,本申请实施例提供了一种磁编码器故障检测方法,所述方法包括:
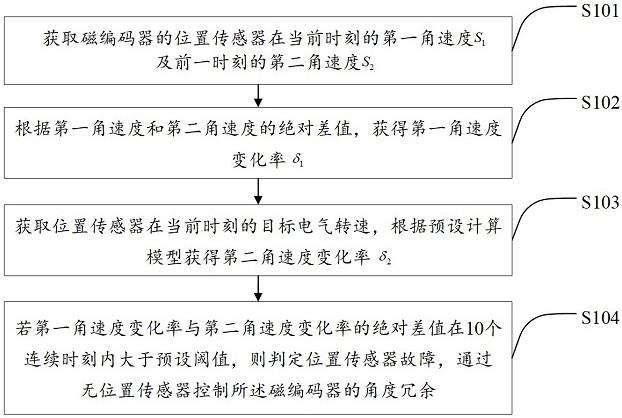
3、获取磁编码器的位置传感器在当前时刻的第一角速度及前一时刻的第二角速度;
4、根据所述第一角速度和所述第二角速度的绝对差值,获得第一角速度变化率;
5、获取所述位置传感器在当前时刻的目标电气转速,根据预设计算模型获得第二角速度变化率;
6、若第一角速度变化率与第二角速度变化率的绝对差值在10个连续时刻内大于预设阈值,则判定位置传感器故障,以通过无位置传感器控制所述磁编码器的角度冗余。
7、优选地,所述第一角速度变化率由公式(1)计算得出:
8、 (1);
9、其中,为磁编码器的位置传感器在当前时刻的第一角速度,为磁编码器的位置传感器在前一时刻的第二角速度。
10、优选地,获取所述位置传感器在当前时刻的目标电气转速,包括:
11、控制电机工作在目标状态,所述目标状态根据当前时刻磁编码器指示的飞机目标姿态获得;
12、在所述目标状态下获取飞控当前输出油门状态;
13、根据所述当前输出油门状态获得所述目标电气转速。
14、优选地,所述根据预设计算模型获得第二角速度变化率,包括:
15、根据公式(2)将所述第二角速度变化率转换为角速度量纲:
16、 (2);
17、其中,,n为电机最大机械转速,p为电机极对数,f为电机电气频率,k为油门控制系数。
18、优选地,还可以包括:
19、配置所述预设阈值,配置所述预设阈值所采用的公式为,其中,为第二角速度变化率。
20、第二方面,本申请实施例提供了一种磁编码器故障检测装置,所述装置包括:
21、第一数据采集单元,用于采集磁编码器的位置传感器在当前时刻的第一角速度及前一时刻的第二角速度;
22、第二数据采集单元,用于获取当前时刻的目标电气转速;
23、第一参数生成单元,用于根据所述第一角速度和所述第二角速度的绝对差值,获得第一角速度变化率;
24、第二参数生成单元,用于根据所述位置传感器在当前时刻的目标电气转速与预设计算模型,获得第二角速度变化率;
25、处理单元,在第一角速度变化率与第二角速度变化率的绝对差值在10个连续时刻内大于预设阈值的情况下,判定位置传感器故障,以通过无位置传感器控制磁编码器的角度冗余。
26、第三方面,本申请实施例提供一种电子设备,所述电子设备包括:
27、处理器;
28、用于存储所述处理器可执行指令的存储器;
29、所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述可执行指令以实现上述的方法步骤。
30、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于执行上述的方法步骤。
31、在本申请实施例中公开提供了一种磁编码器故障检测方法与装置,通过判断第一角速度变化率(磁编码传感器前后二个周期角度的角速度绝对差值)和第二角速度变化率(目标转速*系数(系数为调整和角度差值相同量纲)*dt)的绝对差值是否连续10个周期内超过预设阈值来判断磁编有感控制是否异常,当检测到异常时切换到无位置传感器来控制电机的角度冗余,可以有效解决无人机的动力异常而出现炸机的问题,提高了无人机动力套的冗余度及其可靠性。
技术特征:
1.一种磁编码器故障检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种磁编码器故障检测方法,其特征在于,所述第一角速度变化率由公式(1)计算得出:
3.根据权利要求1所述的一种磁编码器故障检测方法,其特征在于,获取所述位置传感器在当前时刻的目标电气转速,包括:
4.根据权利要求3所述的一种磁编码器故障检测方法,其特征在于,所述根据预设计算模型获得第二角速度变化率,包括:
5.根据权利要求1所述的一种磁编码器故障检测方法,其特征在于,还可以包括:
6.一种磁编码器故障检测装置,其特征在于,包括:
7.一种电子设备,其特征在于,包括:
8.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-5中任一所述的方法。
技术总结
本申请公开了一种磁编码器的故障检测方法、装置,其方法包括:获取位置传感器在前后两个时刻的第一角速度及第二角速度;根据两个角速度的绝对差值,获得第一角速度变化率;获取位置传感器在当前时刻的目标电气转速,根据预设计算模型获得第二角速度变化率;若两个角速度变化率的绝对差值在10个时刻内大于阈值,则判定位置传感器故障,通过无位置传感器控制角度冗余。本发明判断第一角速度变化率(磁编码传感器前后二个时刻的角速度绝对差值)和第二角速度变化率(目标转速*系数(调整和角度差值相同量纲)*dt)的绝对差值是否10个时刻超过阈值来判断有感控制是否异常,当检测到异常就切入无感控制角度冗余,提高了动力套的可靠性。
技术研发人员:阳健,庞智,潘锐祥
受保护的技术使用者:深圳市好盈科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!