目标防误检方法、设备、驾驶设备和介质与流程
本发明涉及目标检测,具体提供一种目标防误检方法、设备、驾驶设备和介质。
背景技术:
1、激光雷达在辅助驾驶和自动驾驶中扮演着重要的角色。相比于被动视觉传感器,激光雷达有着受光照影响小,提供准确的3d信息等重要优势。
2、相关技术中,可以获取包含目标的感兴趣区域的点云数据,根据点云数据确定出几何形状类似于目标形状的点云,并基于点云的轮廓输出目标检测框。然而,利用现有方法进行目标检测时,一些贴有反光材料的交通标识物形成的点云与待检测目标(如车辆)形成点云相近,从而将贴有反光材料的交通标识物误检成车辆的问题,导致目标检测精确度低。
技术实现思路
1、为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决基于点云数据进行目标检测时,容易将一些具有反光特性的物体误检,导致目标检测精确度低的技术问题的目标防误检方法、设备、驾驶设备和介质。
2、在第一方面,本发明提供一种目标防误检方法,所述目标防误检方法包括:
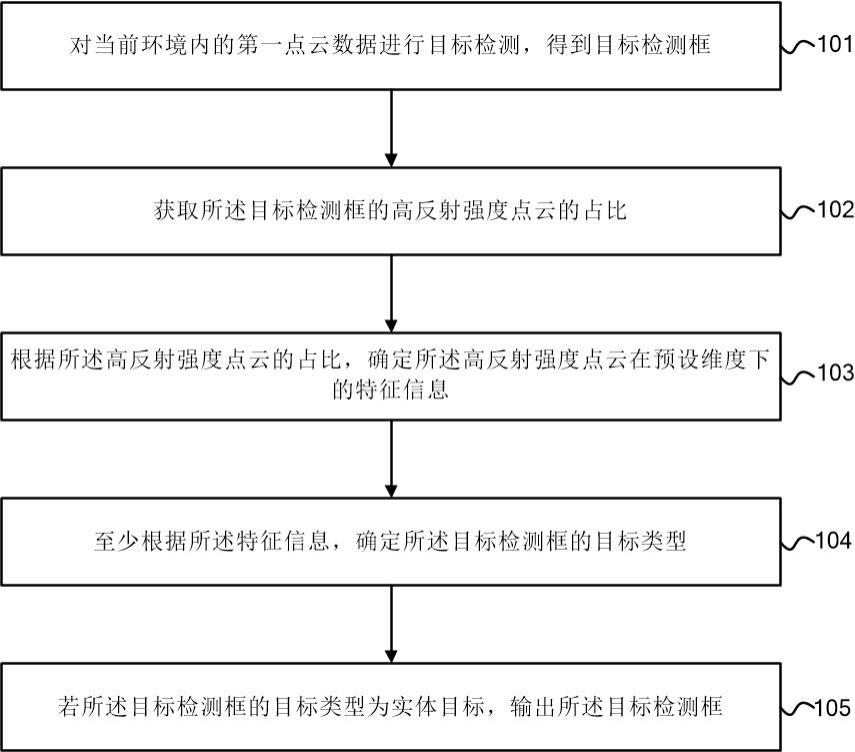
3、对当前环境内的第一点云数据进行目标检测,得到目标检测框;其中,所述第一点云数据包括点云的反射强度;
4、获取所述目标检测框的高反射强度点云的占比;其中,所述高反射强度点云为反射强度大于预设强度阈值的点云;
5、根据所述高反射强度点云的占比,确定所述高反射强度点云在预设维度下的特征信息;
6、至少根据所述特征信息,确定所述目标检测框的目标类型,其中,所述目标类型包括实体目标和伪目标;
7、若所述目标检测框的目标类型为实体目标,输出所述目标检测框。
8、进一步地,上述所述的目标防误检方法中,获取所述目标检测框的高反射强度点云的占比,包括:
9、对所述目标检测框中的第二点云数据进行体素化,得到多个体素内的体素化点云数据;获取每个体素内所述体素化点云数据中高反射强度点云的第一占比作为所述目标检测框的高反射强度点云的占比;和/或
10、获取所述目标检测框中的第二点云数据中高反射强度点云的第二占比作为所述目标检测框的高反射强度点云的占比。
11、进一步地,上述所述的目标防误检方法中,所述预设维度至少包括空间维度和/或时间维度;
12、根据所述高反射强度点云的占比,确定所述高反射强度点云在预设维度下的特征信息,包括:
13、根据所述第一占比,得到所述高反射强度点云的空间分布特征作为所述高反射强度点云在空间维度下的特征信息;和/或
14、确定在预设时间段内所述第一占比的波动信息和/或所述第二占比的波动信息作为所述高反射强度点云在时间维度下的特征信息。
15、进一步地,上述所述的目标防误检方法中,确定在预设时间段内所述第一占比的波动信息和/或所述第二占比的波动信息作为所述高反射强度点云在时间维度下的特征信息,包括:
16、对预设时间段内不同时帧下的所述第一占比进行拟合,得到体素内高反射强度点云在时间维度下的第一拟合曲线;基于所述第一拟合曲线,确定所述第一占比的波动信息作为所述高反射强度点云在时间维度下的特征信息;和/或
17、对预设时间段内不同时帧下的所述第二占比进行拟合,得到目标检测框中高反射强度点云在时间维度下的第二拟合曲线;基于所述第二拟合曲线,确定所述第二占比的波动信息作为所述高反射强度点云在时间维度下的特征信息。
18、进一步地,上述所述的目标防误检方法中,仅根据所述特征信息,确定所述目标检测框的目标类型的过程包括:
19、当所述特征信息满足第一预设条件时,确定所述目标检测框的目标类型为伪目标;
20、其中,所述第一预设条件包括如下条件中的至少一种:
21、所述高反射强度点云的空间分布特征表示均匀分布、所述第一占比的波动信息表示波动平稳、所述第二占比的波动信息表示波动平稳。
22、进一步地,上述所述的目标防误检方法中,仅根据所述特征信息,确定所述目标检测框的目标类型的过程包括:
23、当所述特征信息满足第二预设条件时,确定所述目标检测框的目标类型为实体目标;
24、其中,所述第二预设条件仅包括以下条件中的一种,或者,同时包括以下条件的至少两种:
25、所述高反射强度点云的空间分布特征表示不均匀分布,所述第一占比的波动信息表示波动剧烈,所述第二占比的波动信息表示波动剧烈。
26、进一步地,上述所述的目标防误检方法中,所述高反射强度点云的占比包括所述目标检测框的第二点云数据中高反射强度点云的第二占比;
27、至少根据所述特征信息,确定所述目标检测框的目标类型,包括:
28、根据所述第二占比、所述特征信息和所述目标检测框的观测信息,确定所述目标检测框的目标类型。
29、进一步地,上述所述的目标防误检方法中,根据所述第二占比、所述特征信息和所述目标检测框的观测信息,确定所述目标检测框的目标类型,包括:
30、根据所述第二占比,确定所述目标检测框的第一目标类型;
31、根据所述特征信息,确定所述目标检测框的第二目标类型;
32、根据所述目标检测框的观测信息,确定所述目标检测框的第三目标类型;
33、根据所述目标检测框的第一目标类型、所述目标检测框的第二目标类型和所述目标检测框的第三目标类型,确定所述目标检测框的目标类型。
34、进一步地,上述所述的目标防误检方法中,根据所述第二占比,确定所述目标检测框的第一目标类型,包括:
35、若所述第二占比大于预设占比,确定所述目标检测框的第一目标类型为伪目标;
36、若所述第二占比小于或等于预设占比,确定所述目标检测框的第一目标类型为实体目标。
37、进一步地,上述所述的目标防误检方法中,根据所述目标检测框的观测信息,确定所述目标检测框的第三目标类型,包括:
38、当所述目标检测框的观测信息满足第三预设条件时,确定所述目标检测框的第一目标类型为实体目标;
39、其中,所述第三预设条件包括以下条件中的至少一种:所述目标检测框的对象类别为预设类别、所述目标检测框的运动状态不为静止状态、所述目标检测框的所在位置在指定区域、所述目标检测框的遮挡比大于预设遮挡比。
40、进一步地,上述所述的目标防误检方法中,根据所述目标检测框的观测信息,确定所述目标检测框的第三目标类型,包括:
41、当所述目标检测框的观测信息满足第四预设条件时,确定所述目标检测框的第一目标类型为伪目标;
42、其中,所述第四预设条件仅包括以下条件中的一种,或者,同时包括以下条件的至少两种:
43、所述目标检测框的对象类别不为预设类别、所述目标检测框的运动状态为静止状态、所述目标检测框的所在位置不在指定区域,以及,所述目标检测框的遮挡比大于或等于预设遮挡比。
44、在第二方面,本发明提供一种目标防误检设备,该目标防误检设备包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述任一项所述的目标防误检方法。
45、在第三方面,提供一种驾驶设备,该驾驶设备包括如上所述的目标防误检设备。
46、在第四方面,提供一种计算机可读存储介质,该计算机可读存储介质存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行上述任一项所述的目标防误检方法。
47、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
48、在实施本发明的技术方案中,通过对当前环境内的第一点云数据进行目标检测,得到目标检测框后,获取所述目标检测框的高反射强度点云的占比;根据所述高反射强度点云的占比,确定所述高反射强度点云在预设维度下的特征信息;并至少根据所述特征信息,在确定所述目标检测框的目标类型为实体目标后,输出目标检测框。这样,可以利用伪目标形成的点云中高反射点强度点云占比在预设维度下的特征信息与实体目标形成的点云中高反射点强度点云占比在预设维度下的特征信息之间在较明显的区别,准确地识别出目标检测框是否为实体目标,以防止误检,输出错误的目标检测框,提高了目标检测精确度。
- 还没有人留言评论。精彩留言会获得点赞!