一种森林样地境界及样木位置的测量方法与流程
本发明涉及物联网及地理空间数据采集、计算、处理领域,具体涉及一种森林样地境界及样木位置的测量方法。
背景技术:
1、森林资源调查常采用局部实测调查代替全林调查,其中以抽样理论为基础,随机布设调查样地计算推算林分总体的方法为抽样调查法,其布设的实测地块称为抽样样地(简称样地);以林分平均状态为依据典型选取实测调查样地的方法为标准地调查法,其布设的实测地块称为典型样地(简称标准地)。
2、准确测量样地(标准地)的位置和面积是开展调查的前提,目前样地(标准地)境界测量的方法主要由三种。一是罗盘仪法,使用罗盘仪测角,皮尺或是测绳测距,按照闭合导线法进行精度控制,使用最为广泛,缺点是测量需要通视条件,因此必须清除样线上的灌木、杂草等遮挡物,如果地形复杂或是树木遮挡,需要增设测量站进行转站测量,对于样线坡度大于5°时,要使用三角函数原理进行改平,导致整体方法精度差、流程复杂和效率低。二是全站仪法,其优点是精度高,计算快,但仍需要通视条件并且设备较重,携带不方便。三是gps和rtk定位法,其优点是无需通视条件,设备小巧,但在林下定位精度低,可以用于样地定位,但在境界和样木位置测量中难以达到精度要求。
3、综上所述,亟需提供一种操作简单,测量方法简易,精度可靠,可以大幅提升测量效率的森林样地境界及样木位置的测量方法。
技术实现思路
1、本发明的目的是提供一种操作简单,测量方法简易,精度可靠,可以大幅提升测量效率的森林样地境界及样木位置的测量方法。
2、上述目的是通过如下技术方案实现:一种森林样地境界的测量方法,所述森林样地包括四个角点,所述四个角点按时针转动方向分别为 p1、 p2、 p3和 p4, p1与 p2之间的距离为样地宽度, p2至 p3之间的距离为样地长度,使用移动测量终端进行移动测量,所述移动测量终端设有移动测量模块,所述移动测量模块包括微处理器、第一无线测距模块、第二无线测距模块和第一无线通信模块,所述移动测量终端包括支撑部和旋转部,所述旋转部的中部与所述支撑部转动连接,所述旋转部的两端分别设有所述第一无线测距模块和第二无线测距模块,具体包括如下步骤:
3、(1)依据调查需求确定样地类型,若样地类型为新设样地和传统固定样地,则执行步骤(2),若样地类型为智能固定样地,则执行步骤(3);
4、(2)在森林样地的角点 p1布设电子定位桩,所述电子定位桩设有第三无线测距模块和第二无线通信模块;
5、(3)启动电子定位桩和移动测量终端,移动计算终端连接移动测量终端;
6、(4)移动计算终端搜索电子定位桩,激活电子定位桩后建立连接,获取电子定位桩位置;
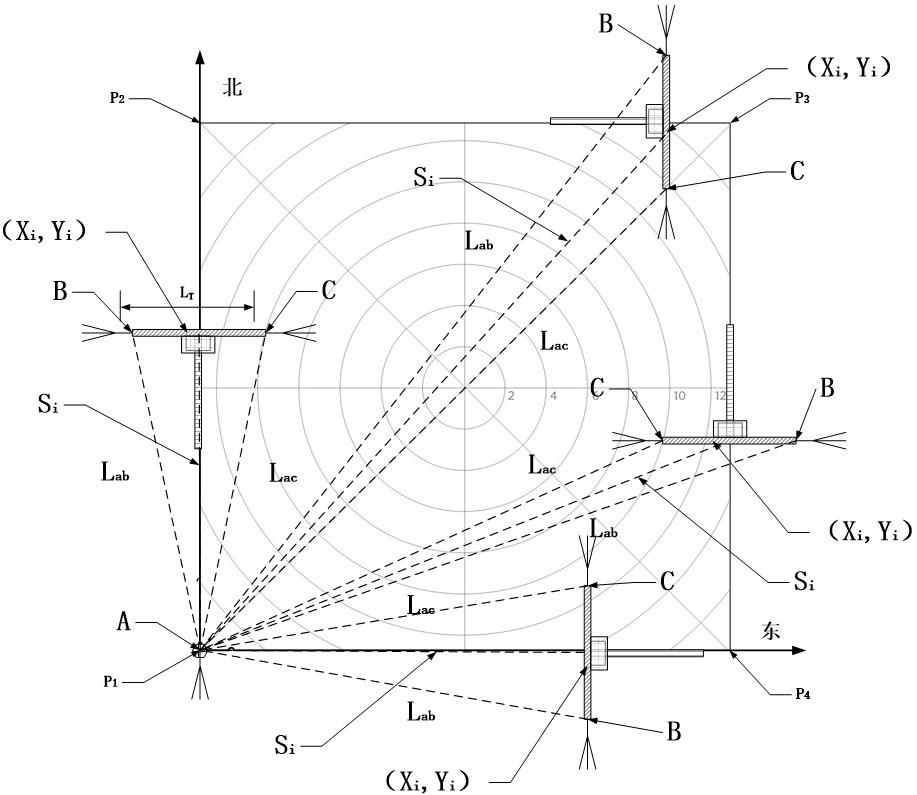
7、(5)以设置电子定位桩的角点 p1为原点, p1和 p2的连线方向为y轴, p1和 p4的连线方向为x轴,建立坐标系,移动测量终端从 p1依次移动至 p2、 p3和 p4后再返回至 p1,行进过程中,保证旋转部两端的第一无线测距模块与第二无线测距模块在同一水平,测量的第三无线测距模块与第一无线测距模块、第二无线测距模块之间的距离,移动计算终端计算电子定位桩至旋转部中心的斜距以及旋转部中心的横坐标或纵坐标,并确定是否在森林样地内,移动计算终端记录 p2、 p3和 p4的位置坐标;
8、其中,从 p1移动至 p2行进过程中,计算旋转部中心的横坐标,保持横坐标的值为0的方向移动,当计算的电子定位桩至旋转部中心的斜距等于样地宽度且横坐标为0时,旋转部旋转至垂直设置,保证旋转部两端的第一无线测距模块与第二无线测距模块在垂直方向,移动计算终端计算移动测量终端投影至水平面后的纵坐标,确定 p2的位置;
9、从 p2移动至 p3行进过程中,计算旋转部中心的纵坐标,保持纵坐标的值为样地宽度方向移动,当计算的电子定位桩至旋转部中心的斜距等于森林样地的斜边长度且纵坐标的值为样地宽度时,旋转部旋转至垂直设置,保证旋转部两端的第一无线测距模块与第二无线测距模块在垂直方向,移动计算终端计算移动测量终端投影至水平面后的横坐标,确定 p3的位置;
10、从 p3移动至 p4行进过程中,计算旋转部中心的横坐标,保持横坐标的值为样地长度的方向移动,当计算的电子定位桩至旋转部中心的斜距等于样地长度且横坐标为样地长度时,旋转部旋转至垂直设置,保证旋转部两端的第一无线测距模块与第二无线测距模块在垂直方向,移动计算终端计算移动测量终端投影至水平面后的纵坐标,确定 p4的位置;
11、从 p4移动至 p1行进过程中,计算旋转部中心的纵坐标,保持 p3与 p4的纵坐标的值为0的方向移动,最后回到 p1位置,完成境界测量。
12、进一步的技术方案是,所述步骤(5)中设定第三无线测距模块的位置为a,所述第一无线测距模块的位置为b,所述第二无线测距模块的位置为c,所述电子定位桩至旋转部中心的斜距的计算公式如下:
13、式中, l t为第一无线测距模块与第二无线测距模块之间的距离; l ab为第三无线测距模块与第一无线测距模块之间的距离; l ac为第三无线测距模块与第二无线测距模块之间的距离; s i为电子定位桩至旋转部中心的斜距;∠ b为a、b的连线与b、c连线的夹角。
14、需要说明的是,本发明的计算公式中,设定当旋转部中心在样地边界上时,所述第一无线测距模块的位置,即位置b在样地外,旋转部旋转垂直后,所述第一无线测距模块的在第二无线测距模块的上方,即位置b在位置c的上方;
15、进一步的技术方案是,所述步骤(5)中从 p1移动至 p2以及 p3移动至 p4行进过程中的旋转部中心的横坐标的计算公式为:
16、式中, x i为旋转部中心在水平面的横坐标。
17、进一步的技术方案是,所述步骤(5)中从 p2移动至 p3以及 p4移动至 p1行进过程中的旋转部中心的横坐标的计算公式为:
18、式中, y i为旋转部中心在水平面的纵坐标。
19、进一步的技术方案是,所述步骤(5)中,确定 p2和 p4位置时移动测量终端投影至水平面后的纵坐标的计算公式以及确定 p3位置时移动测量终端投影至水平面后的横坐标的计算公式为:
20、。
21、进一步的技术方案是,所述步骤(5)中确定旋转部中心是否在森林样地内的计算公式为:
22、式中: p i为当前旋转部中心是否在森林样地范围,若为1,则为在森林样地范围;若为0,则不在森林样地范围; l l为设置森林样地的长度, l w为设置森林样地的宽度。
23、进一步的技术方案是,所述步骤(5)中在 p2、 p3和 p4的位置确定时还包括校准的步骤,确定 p2和 p4位置时,计算 p2和 p4的纵坐标后,计算样地宽度与此时纵坐标的差值,计算公式如下:
24、式中, r1为样地宽度与此时纵坐标的差值;若 r1为0,当前位置则为 p2或 p4,若不为0,则将旋转部水平设置后,保持 x i=0或 x i= l l继续移动值为 r1的距离,移动后,将移动测量终端的旋转部垂直设置,再次计算 y i和 r1,直至 r1为0,确定当前位置为 p2或 p4;
25、确定 p3位置时,计算 p3的横坐标后,计算样地长度与此时横坐标的差值,计算公式如下:
26、式中, r2为样地宽度与此时纵坐标的差值;若 r2为0,当前位置则为 p3,若不为0,则将旋转部水平设置后,保持 y i= l w继续移动值为 r2的距离,移动后,将移动测量终端的旋转部垂直设置,再次计算 y i和 r2,直至 r2为0,确定当前位置为 p3。
27、进一步的技术方案是,所述步骤(5)中确定 p4位置后,将旋转部旋转至水平,移动和调整位置,确定电子定位桩至旋转部中心的斜距等于样地长度,同时纵坐标为0的位置,确定该位置为 p4′,计算森林样地的闭合差,所述森林样地的闭合差为 p4和 p4′的直线距离,若闭合差达到预定的样地测量精度要求,则步骤(5)中移动测量终端从 p4′移动至 p1,完成森林样地境界测量,若达不到预定的样地测量精度要求,则重新执行步骤(5),直至达到精度要求。
28、进一步的技术方案是,所述步骤(5)中在行进路线上的边界木,将移动测量终端移动至样木胸径中间,判断是否在森林样地内,对界外木进行标记。
29、进一步的技术方案是,所述移动测量终端还包括微处理器和存储模块,所述微处理器将获取的无线测距信号、电子罗盘模块的方位角和倾斜角参数通过存储模块存储,所述移动测量终端通过数据接口或第一无线通信模块与移动计算终端通信连接,所述移动计算终端用于获取存储模块的数据并进行步骤(5)中的数据计算。
30、进一步的技术方案是,所述移动计算终端搭载有样地测量系统,用于完成移动测量终端和电子定位桩连接激活,样地境界设置、测量及检验,样木位置测量。
31、进一步的技术方案是,所述样地测量系统包括:
32、移动测量终端连接模块:用于移动计算终端通过无线或有线连接移动测量终端,实时获取移动测量终端采集的测量参数;
33、电子定位桩扫描激活模块:用于移动计算终端通过无线扫描发现周围电子定位桩,连接后发送特定的信号或关键词,唤醒无线定位桩模块整个电路;
34、测量样地设置模块:用于设置样地角点坐标、样地类型,设置样地长度和宽度;
35、样地境界测量模块:通过测量样地设置时确定的角点和样地类型,以及实时获取移动测量终端的测量参数,按照森林样地境界测量方法,计算完成样地境界测量、样地边界木判定和样地角点定位;
36、样地境界精度检验模块:通过计算的森林样地的闭合差,结合测量样地设置的样地类型,计算样地测量精度;
37、样地境界测量模块:通过实时获取移动测量终端的测量参数,按照森林样地样木位置测量方法,计算完成样地内所有样木的方位角、倾斜角、斜距、水平距测量。
38、本实现上述目的,本发明还提供一种样木位置的测量方法,以 p1为起点,移动测量终端按预定路线行进,对在上述的森林样地境界的测量方法测量的森林样地境界内的所有样木逐个依次进行测量,移动测量终端设有电子罗盘模块,包括如下步骤:
39、(1)到达被测样木,将移动测量终端的旋转部水平放置,保证旋转部两端的第一无线测距模块与第二无线测距模块在同一水平,实时记录电子定位桩至旋转部中心的斜距;
40、(2)沿样木胸径处水平移动移动测量终端,使第三无线测距模块与第一无线测距模块和第二无线测距模块之间的距离相等,此时电子定位桩至旋转部中心的斜距为样木斜距,并读取电子罗盘模块的角度为样木的方位角;
41、(3)保持移动测量终端位置不动,旋转部旋转至垂直设置,保证旋转部两端的第一无线测距模块与第二无线测距模块在垂直方向,再次测量第三无线测距模块与第一无线测距模块、第二无线测距模块的距离,移动计算终端计算移动测量终端投影至水平面后与电子定位桩之间的水平距以及倾斜角;
42、(4)对已测样木进行标记,依次完成样地内所有样木测量。
43、进一步的技术方案是,所述步骤(3)中移动测量终端投影至水平面后与电子定位桩之间的水平距为电子定位桩至样木的水平距离,设旋转部的中心为d,移动测量终端投影至水平面后与电子定位桩之间的水平距以及倾斜角的计算公式如下:
44、式中, l ap为电子定位桩至样木的水平距离; l ad为电子定位桩至样木的斜距;∠ dap为电子定位桩至样木的倾斜角。
45、本发明的森林样地境界测量中,将载有测距模块、无线通信模块的电子定位桩固定于森林样地角点,水平手持连接有移动计算终端,搭载两个测距模块和电子罗盘模块的可旋转移动测量终端,移动计算终端通过获取移动测量终端电子罗盘模块角度、两个测距模块和电子定位桩的距离,实时标记当前距离电子定位桩位置、距离,绘制行进路线、行进方向,标记是否在森林样地内等信息,引导用户行进至目标角点位置。在目标角点位置,通过90°旋转旋转部至垂直,移动计算终端通过获取移动测量终端电子罗盘模块角度、两个测距模块和电子定位桩的水平距离,计算移动测量终端水平距离,反复调试后确定目标角点位置。用户按照移动计算终端提示依次移动,完成森林样地所有角点测量。
46、样木位置测量,则按照已确定样地境界,按预定路线(之字形路线),手持移动测量终端移动至样木面前,将手持移动终端放置于样木胸径处,测量斜距、方位角,再旋转旋转部至垂直状态,测量水平距、倾斜角,依次完成所有样木测量,绘制固定样木位置图。
47、相比于现有技术,本发明具备如下优势:
48、1、测量精度较高:本发明中距离测量的结果主要由距离测定的精度决定,uwb无线测距精度可以达到0.1米,满足林业调查规划设计中样地境界和样木位置的测量精度要求;
49、2、测量流程简单,测量效率大幅提升:在被测样地的某一角点固定电子定位桩,手持按照移动计算终端提示方向,向目标角点行进即可,遇到边界木使用移动计算终端即可判定是否在样地,到达目标角点附近,旋转移动测量终端旋转部至90°,即可以确定目标角点的水平距。测量过程无需可视条件,免去了砍线、罗盘仪操作,将原来3个人的工作量,只需要一个人即可独立完成,测量快速简单,测量效率大幅提升;
50、3、可对复杂地形、样木及灌木遮挡等情况快速测量:本发明提供的方法使用无线通信方式,可以在非可视条件下进行测量,对复杂地形、样木及灌木遮挡等情况下测量具有较强适应性,无需增加工作量。
- 还没有人留言评论。精彩留言会获得点赞!