一种基于微波光子信号的散射中心参数提取方法
本发明属于雷达信号处理,具体涉及一种基于微波光子信号的散射中心参数提取方法。
背景技术:
1、雷达目标电磁散射特性的准确预估及解译在军事领域具有非常重要的意义。微波光子技术使雷达具备了收发和处理跨谱段大带宽信号的能力,极大提升了目标的频率响应的测量范围,为目标回波频率依赖性的提取提供了可能性,从而有助于更好地实现基于回波数据的目标电磁特性预估。
2、电磁散射特征提取可以通过估计散射中心参数化模型的参数实现,即将散射中心电磁特征提取问题等价为电磁参数估计问题进行研究。高效、精确地提取目标特征是实现基于目标电磁特性目标识别分类的基础。
3、微波光子雷达发射大带宽跨谱段的信号,微波光子雷达提供了高效的传输、接收和处理超高分辨率sar图像的方式,在跨谱段雷达系统条件下,目标信息量相比传统雷达成倍增加,从而有利于基于频率因子的结构识别。提高目标识别和分类的准确性和效率。但带宽的增加使微波光子雷达系统对频率和方位角,俯仰角的依赖性更加突出。而这导致了传统方法不能完全提取超宽带信号中包含的精细特征信息。另外,距离分辨率的提升和观测视角的增加使得回波数据存在严重的距离方位耦合。不消除距离方位耦合直接成像会严重降低图像质量。
技术实现思路
1、为了解决现有技术中所存在的上述问题,本发明提供了一种基于微波光子信号的散射中心参数提取方法。
2、本发明要解决的技术问题通过以下技术方案实现:
3、一种基于微波光子信号的散射中心参数提取方法,所述散射中心提取方法包括:
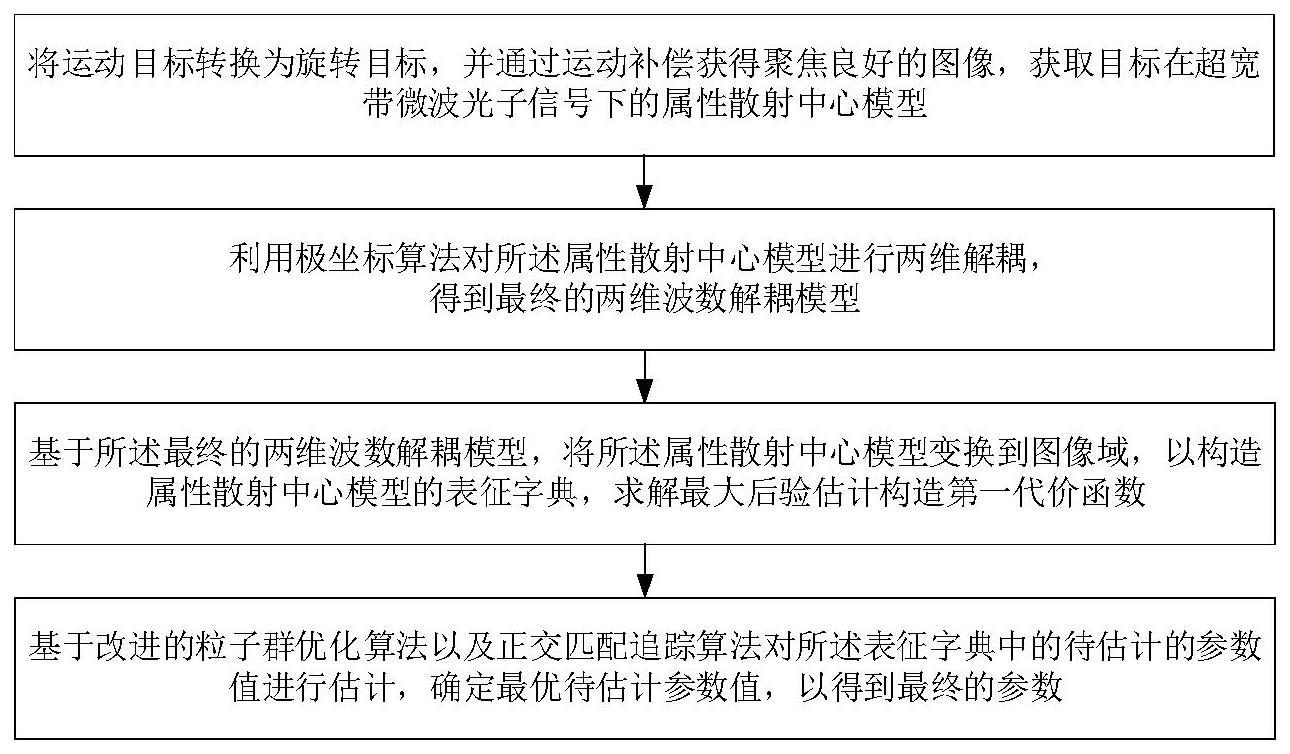
4、s1、将运动目标转换为旋转目标,并通过运动补偿获得聚焦良好的图像,获取目标在超宽带微波光子信号下的属性散射中心模型;
5、s2、利用极坐标算法对所述属性散射中心模型进行两维解耦,得到最终的两维波数解耦模型;
6、s3、基于所述最终的两维波数解耦模型,将所述属性散射中心模型变换到图像域,以构造属性散射中心模型的表征字典,求解最大后验估计构造第一代价函数;
7、s4、基于改进的粒子群优化算法以及正交匹配追踪算法对所述表征字典中的待估计的参数值进行估计,确定最优待估计参数值,以得到最终的参数。
8、可选地,所述属性散射中心模型表述所述属性散射中心的回波信号;
9、所述属性散射中心模型表示为:
10、
11、其中,表示散射中心的回波信号;f表示频率,单位为hz;fc表示中心频率;ap表示信号幅度;γi表示方向角度的依赖因子;c表示电磁波传播速度,单位为m/s;表示方位观测角度,单位为rad;表示散射中心i的参数集,ai为幅度,li为长度,为散射中心的初始指向角,xi为方位向位置,yi为距离向位置,αi∈[-1,-0.5,0,0.5,1]为频率依赖因子。
12、可选地,步骤s2包括:
13、s2.1、将引入属性散射中心模型,得到直角坐标系下的两维波数解耦模型;
14、s2.2、基于直角坐标系下的两维波数解耦模型得到最终的两维波数解耦模型,所述最终的两维波数解耦模型表示为:
15、
16、
17、其中,
18、可选地,所述表征字典中包含所述属性散射中心的待估计参数,且包含所述待估计参数在估计值范围内所有的待估计的参数值;
19、步骤s3包括:
20、s3.1、将所述两维波数解耦模型通过逆傅里叶变换变换到图像域,以得到待估计的参数值;
21、s3.2、利用所述待估计的参数集构建表征字典;
22、s3.3、通过求解基于图像域中目标的统计模型形成的最大后验估计构造第一代价函数。
23、可选地,步骤s3.3包括:
24、s3.31、对散射场模型进行离散分解,将分解后的残余误差取模得到初步代价函数;
25、s3.32、将图像向量的幅值与残差图像向量的幅值相加,得到幅值相加的结果,基于幅值相加的结果得到在包络精确对齐后的图像,以构造最终代价函数;
26、s3.33、对幅值相加的结果进行统计建模,得到值相加的结果的最大化后验概率密度函数;
27、s3.34、对最大化后验概率密度函数进行最大化后验概率估算,得到分布扩散约束的代价函数;
28、s3.35、将峰值幅度约束引入分布扩散约束的代价函数,得到第一代价函数。
29、可选地,所述第一代价函数表示为:
30、
31、其中,gp=qp(θp)+n,n为噪声,λ1、λ2为正则化参数以控制两项之间的权重,μp为qp的均值,m,n分别为距离向和方位向点数,θp为积累角。
32、可选地,步骤s4包括:
33、s4.1、利用改进的粒子群优化算法,最小化所述第一代价函数,以对所述表征字典进行求解,得到当前最优粒子的位置信息;
34、s4.2、利用正交匹配追踪算法,将步骤s4.1得到的当前最优粒子的位置信息输入所述最终的两维波数解耦模型中,引入第二代价函数,以估计最优频率相关因子;
35、s4.3、将步骤s4.1得到的当前最优粒子的位置信息输入所述最终的两维波数解耦模型中,引入第三代价函数,以利用最小二乘法估计散射中心的幅度;
36、s4.4、将步骤s4.1得到的当前最优粒子的位置信息中包含的参数值以及所述最优频率相关因子、所述散射中心的幅度,确定为最优待估计参数值。
37、可选地,所述第二代价函数为:
38、
39、其中,rp(x,y)表示信号斜距方程,(x,y)为北天东坐标系下的坐标,为积累角,为由θp构造的回波信号,αi∈[-1,-0.5,0,0.5,1],()*为复数共轭。
40、可选地,所述第三代价函数为:
41、
42、其中,ai表示散射中心i的幅度。
43、可选地,所述改进的粒子群优化算法包括:
44、步骤a、随机生成粒子群;
45、步骤b、初始状态时,计算粒子群中每个粒子的目标函数值;
46、步骤c、基于每个粒子的目标函数值,确定粒子群中粒子的极值以及粒子群中的全局最优解;
47、步骤d、更新粒子群中粒子的速度以及位置参数;
48、步骤e、更新后,计算粒子群中粒子的目标函数值;
49、步骤f、基于每个粒子的目标函数值,更新粒子群中粒子极值以及粒子群中的全局最优解;
50、步骤g、对粒子群中粒子极值进行模拟退火邻域搜索,更新各粒子的函数值,并进行最优选择,更新全局最优解;
51、步骤h、重复迭代步骤g,直至满足最大迭代次数或者最小变换准则,停止迭代跳转至步骤i,否则跳转至步骤d;
52、步骤i、在粒子群中确定当前最优粒子的位置信息,基于该位置信息产生位置参数的目标粒子群;
53、步骤g、在所述目标粒子群中搜索粒子极值以及全局最优解;
54、步骤k、重复步骤d至步骤h,直至满足最大迭代次数或者最小变换准则,停止迭代跳转至步骤l,否则跳转至步骤g;
55、步骤l、输出当前最优粒子的位置信息;
56、其中,所述位置信息包括:待估计的参数值。
57、与现有技术相比,本发明的有益效果:
58、通过本发明的参数估计方法,可实现跨谱段、大转角条件下,从目标回波的频率角度依赖性中提取几何电磁特征的问题,提高预估出的散射中心二维图像质量。
59、以下将结合附图及对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!