柔性自驱动压力传感器及其制备方法与流程
本发明涉及柔性传感器的,尤其涉及一种柔性自驱动压力传感器及其制备方法。
背景技术:
1、近年来,模拟人类皮肤功能属性的电子皮肤逐渐称为研究热点之一,尤其是感知压力或应变的触觉传感器,能够实现从机械刺激到电信号的高效转换,在人机交互、智能机器人以及生物医疗等领域有着重要的应用前景。基于传统硅基mems电容和电阻式压力传感器,不仅存在不能与曲面待测表面相兼容的问题,且其无源特性也是需要一定能耗,与碳中和理念相违背。
2、摩擦效应是指在外界作用力下,两种不同材料相互接触和分离,在接触界面处产生电荷的转移,由于摩擦起电和静电感应的耦合,在背面电极处产生电荷的流动。因此,基于摩擦效应的触觉传感器,在外界作用力的情况下,不仅可以作为一个能源收集器,将周围产生的机械能转换成为电能存储起来,还可以依据产生的电信号作为自驱动触觉传感器。
3、现有技术中公开了一种alk-ti3c2/pdms柔性压阻传感器的制备方法,通过将硅胶混合液覆盖在具有凸起结构的砂布上,从而得到第一pdms薄膜,在第一pdms薄膜上覆盖全氟硅氧烷后再覆盖一层硅胶混合液并固化,得到第二pdms薄膜,在第二pdms薄膜上覆盖alk-ti3c2。
4、然而,现有技术中提供的柔性压阻传感器的表面形态不规则,器件一致性和可重复性差,且传统的柔性电阻式和电容式压力传感器,在工作时都需要外部电能输入,这就大大限制了其使用场景和使用寿命。因此,亟需提供一种方案改善上述问题。
技术实现思路
1、本发明的目的在于提供一种柔性自驱动压力传感器及其制备方法,能够探测较小压力,稳定性好并且响应速度快,无需外部电能输入,同时工艺简单、可重复性强,在柔性可穿戴电子,生物医疗和智能软体机器人上有着较好的应用前景。
2、第一方面,本发明提供的一种柔性自驱动压力传感器,采用如下的技术方案:
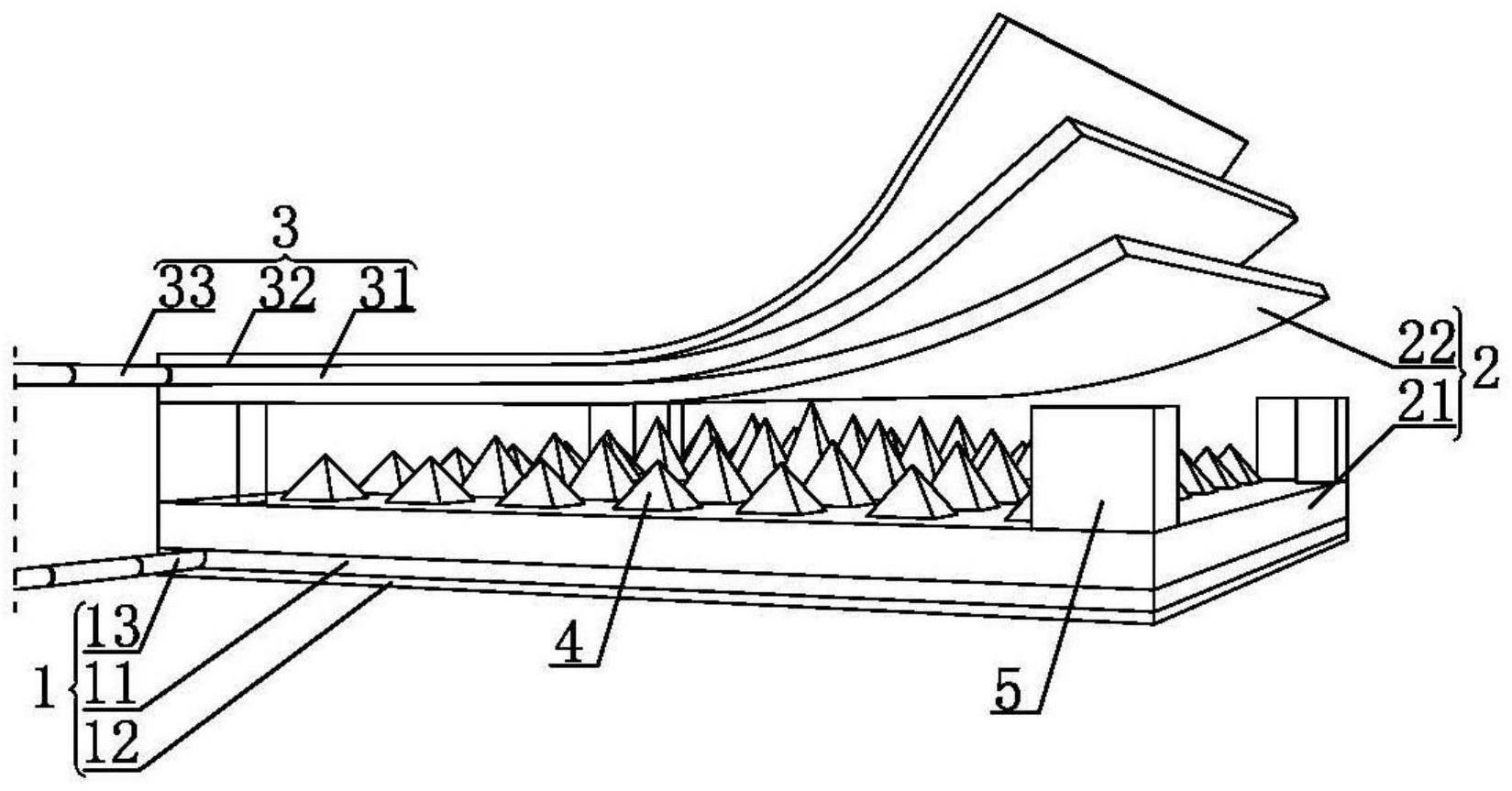
3、包括从底部至顶部依次层叠设置的底部封装部、摩擦电压力传感部和顶部封装部;
4、所述摩擦电压力传感部包括层叠设置的mxene基硅胶层和压力摩擦层;
5、所述mxene基硅胶层靠近所述压力摩擦层的一侧一体成型有多个mxene基硅胶微结构块和多个mxene基隔离壁,多个所述mxene基隔离壁相对远离所述mxene基硅胶层的一端与所述压力摩擦层相互抵触,多个所述mxene基硅胶微结构块位于所述mxene基硅胶层与所述压力摩擦层之间;
6、所述mxene基硅胶微结构块靠近所述压力摩擦层的一侧呈尖端设置;
7、所述mxene为max相移除主族元素后形成的具有二维结构的材料;
8、所述max相为mn+1axn,其中n等于1、2和3中的任一个,所述m为过渡金属元素,所述a为主族元素,所述x为碳元素或氮元素。
9、本发明提供的柔性自驱动压力传感器的有益效果在于:摩擦电压力传感部通过压力使得压力摩擦层与mxene基硅胶层相互摩擦,从而在压力摩擦层与mxene基硅胶层的接触界面产生电荷的转移,并通过底部封装部和顶部封装部将电信号传输至外部,从而无需外部电能的输入;mxene基硅胶层上的多个mxene基硅胶微结构块靠近压力摩擦层的一侧呈尖端设置,因此当mxene基硅胶微结构块与压力摩擦层进行接触时,mxene基硅胶微结构块与压力摩擦层的接触面积的变化率增加,有效提高了摩擦电压力传感部对压力探测的灵敏度,使得摩擦电压力传感部能够检测微小的压力变化;并且,本发明提供的压力传感器无需额外电源供电,能够实现器件的低功耗化和小型化,结构稳定,易于阵列化,在可穿戴电子、智能机器人和柔性设备上有着广泛的应用前景。
10、可选的,多个所述mxene基硅胶微结构块阵列设置在所述mxene基硅胶层上。
11、可选的,多个所述mxene基硅胶微结构块从阵列中心向阵列四周的第一尺寸依次减小;所述第一尺寸为所述mxene基硅胶微结构块端部与所述mxene基硅胶层的垂直距离。
12、可选的,多个所述mxene基硅胶微结构块的第一尺寸均相等;所述第一尺寸为所述mxene基硅胶微结构块端部与所述mxene基硅胶层的垂直距离。
13、第二方面,本发明提供的一种柔性自驱动压力传感器的制备方法,采用如下的技术方案,包括以下步骤:
14、制备微结构树脂模板;
15、制备mxene基硅胶混合物;
16、将所述mxene基硅胶混合物覆盖在所述微结构树脂模板上,固化后剥离得mxene基硅胶层;
17、拼合所述mxene基硅胶层与压力摩擦层得摩擦电压力传感部;
18、拼合所述摩擦电压力传感部与底部封装部和顶部封装部。
19、本发明提供的柔性自驱动压力传感器的制备方法的有益效果在于:预先制备微结构树脂模板,能够根据所需要的mxene基硅胶层的结构形态对微结构树脂模板进行调整,提高了mxene基硅胶层的可定制化程度,并且能够使用于批量化的制备生产,可重复性强。
20、可选的,执行制备mxene基硅胶混合物的步骤中包括以下步骤:制备mxene粉末;将所述mxene粉末与硅胶基体混合均匀后制得mxene基硅胶混合物;其中所述mxene粉末占所述硅胶基体的重量百分比为2%-10%。将mxene粉末与硅胶基体进行混合后,使得mxene粉末在硅胶基体中混合均匀,能够增强摩擦效应,从而提高压力传感器的基本性能。
21、可选的,所述mxene粉末为ti3c2f2粉末。含f基团的mxene的电负性更优,能够有效地提高摩擦电压力传感部的输出,提高摩擦电压力传感部对压力的灵敏度。
22、可选的,执行制备mxene粉末的步骤中包括,将ti3alc2-max前驱体加入1-3m的氢氟酸溶液中反应10-20min后,滤出干燥并研磨,得mxene粉末。将ti3alc2-max前驱体加入至低浓度的hf溶液中,能够提高制备生产时的安全性,制备得到含f基团的mxene的电负性更优,能够有效地提高摩擦电压力传感部的输出,提高摩擦电压力传感部对压力的灵敏度。
23、可选的,执行将所述mxene基硅胶混合物覆盖在所述微结构树脂模板上,固化后剥离得mxene基硅胶层的步骤中包括:将所述mxene基硅胶混合物覆盖在所述微结构树脂模板上,置于真空环境中静置25-35min后,烘干固化后剥离得mxene基硅胶层。将mxene基硅胶混合物覆在微结构树脂模板后,在真空环境中能够除去mxene基硅胶混合物与微结构树脂模板之间的气体,使得mxene基硅胶混合物与微结构树脂模板充分贴合,进而mxene基硅胶混合物固化得到mxene基硅胶层后,mxene基硅胶层上即形成有微结构树脂模板上的微结构。
24、可选的,所述mxene基硅胶混合物的质量与所述微结构树脂模板表面积比值为0.1g/cm2-0.3g/cm2。
技术特征:
1.一种柔性自驱动压力传感器,其特征在于,包括从底部至顶部依次层叠设置的底部封装部、摩擦电压力传感部和顶部封装部;
2.根据权利要求1所述的柔性自驱动压力传感器,其特征在于,多个所述mxene基硅胶微结构块阵列设置在所述mxene基硅胶层上。
3.根据权利要求2所述的柔性自驱动压力传感器,其特征在于,多个所述mxene基硅胶微结构块从阵列中心向阵列四周的第一尺寸依次减小;所述第一尺寸为所述mxene基硅胶微结构块端部与所述mxene基硅胶层的垂直距离。
4.根据权利要求1所述的柔性自驱动压力传感器,其特征在于,多个所述mxene基硅胶微结构块的第一尺寸均相等;所述第一尺寸为所述mxene基硅胶微结构块端部与所述mxene基硅胶层的垂直距离。
5.一种柔性自驱动压力传感器的制备方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的柔性自驱动压力传感器的制备方法,其特征在于,执行制备mxene基硅胶混合物的步骤中包括以下步骤:
7.根据权利要求6所述的柔性自驱动压力传感器的制备方法,其特征在于,所述mxene粉末为ti3c2f2粉末。
8.根据权利要求6所述的柔性自驱动压力传感器的制备方法,其特征在于,执行制备mxene粉末的步骤中包括,将ti3alc2-max前驱体加入1-3m的氢氟酸溶液中反应10-20min后,滤出干燥并研磨,得mxene粉末。
9.根据权利要求5所述的柔性自驱动压力传感器的制备方法,其特征在于,执行将所述mxene基硅胶混合物覆盖在所述微结构树脂模板上,固化后剥离得mxene基硅胶层的步骤中包括:
10.根据权利要求9所述的柔性自驱动压力传感器的制备方法,其特征在于,所述mxene基硅胶混合物的质量与所述微结构树脂模板表面积比值为0.1g/cm2-0.3g/cm2。
技术总结
本发明提供了一种柔性自驱动压力传感器及其制备方法,涉及柔性传感器的技术领域。压力传感器包括依次层叠设置的底部封装部、摩擦电压力传感部和顶部封装部;摩擦电压力传感部包括层叠设置的MXene基硅胶层和压力摩擦层;MXene基硅胶层上靠近所述压力摩擦层的一侧成型有多个MXene基硅胶微结构块和多个MXene基隔离壁,多个MXene基隔离壁另一端与压力摩擦层相互抵触,多个MXene基硅胶微结构块位于MXene基硅胶层与压力摩擦层之间;MXene基硅胶微结构块靠近压力摩擦层的一侧呈尖端设置。本发明提供的压力传感器可以探测较小压力,并且稳定性好响应速度快,无需外部电能输入,同时工艺简单、可重复性强,在柔性可穿戴电子,生物医疗和智能软体机器人上有着较好的应用前景。
技术研发人员:陶娟,丁士进,朱宝
受保护的技术使用者:嘉善复旦研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!