一种移动目标的追踪方法、系统及设备与流程
本发明属于追踪检测,尤其涉及一种移动目标的追踪方法、系统及设备。
背景技术:
1、现有技术都是对特别种类的目标进行追踪,如行走的行人、运动的汽车、杯子和笔记本等,但是在对这些目标进行追踪时,需要提前建立模型进行训练,并根据所要追踪的目标不同,如在追踪行走的行人时,还需要提取关于行人的一些特征,并且针对所追踪的目标的不同,需要建立和训练不同的模型。比如训练好的模型是针对行人和汽车的,那么在具体应用追踪中,该模型只能对行人和汽车进行追踪,对其它的物体就不起作用。但是在实际的作业现场,如所变电站等场所,要追踪的目标各种各样,而对每一种物体分别建立相应的模型来进行追踪,这将会非常麻烦,而且在进行具体的追踪时,各种不同的模型同时工作将会导致追踪容易出现问题,导致追踪失败;同时在作业现场中的所要追踪的目标存在不确定性时,比如要对吊车运输的未知物体进行追踪,那么所建立和训练的所有的模型都将会失效。
技术实现思路
1、为了克服现在技术存在的问题,本发明提供一种移动目标的追踪方法、系统及设备来解决现有技术中存在的上述问题。
2、一种移动目标的追踪方法,包括以下步骤:
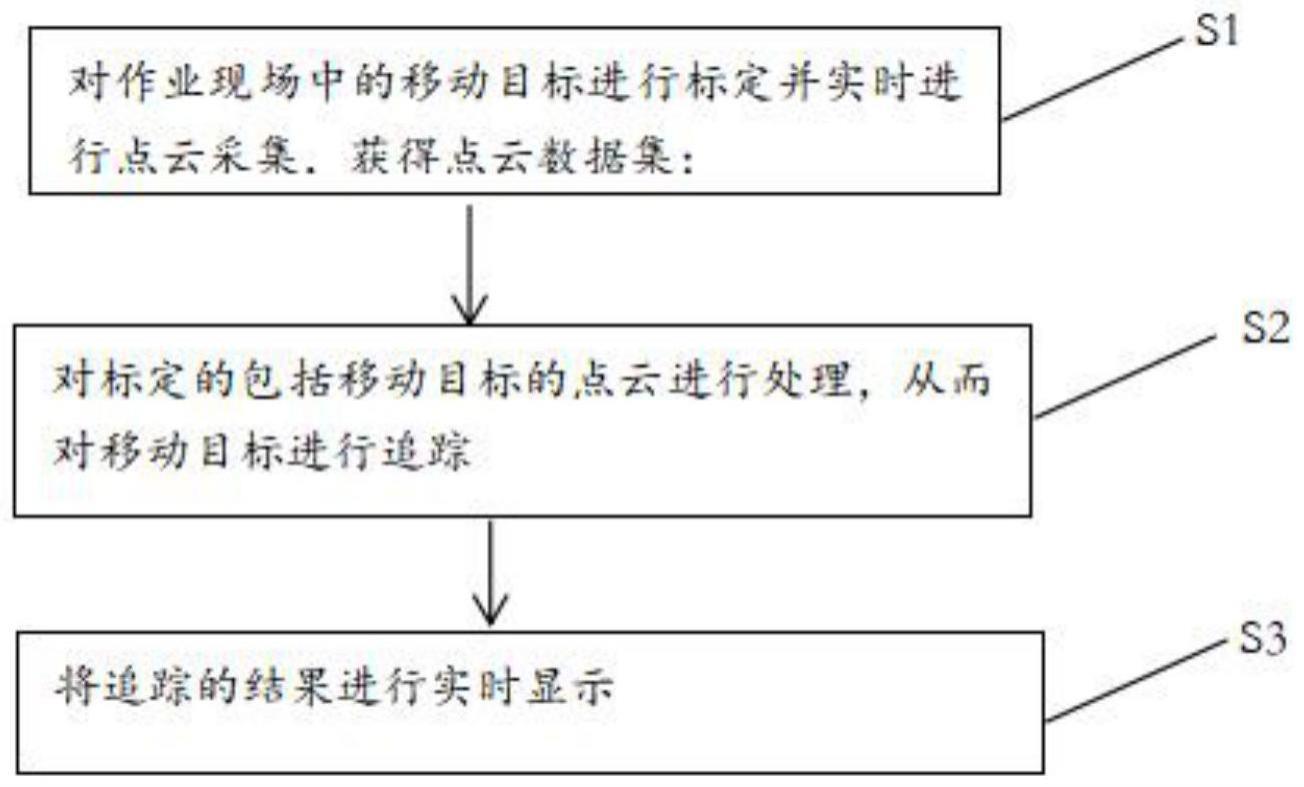
3、s1.对作业现场中的移动目标进行标定并实时进行点云采集,获得点云数据集;
4、s2.对标定的包括移动目标的点云进行处理,从而对移动目标进行追踪;
5、s3.将追踪的结果进行实时显示。
6、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s2采用目标跟踪方法对标定的所述移动目标进行追踪,所述目标跟踪方法包括对所述点云数据集中的所有点云进行处理后,进行点云个数判断和遮挡判断,根据判断结果来进行追踪。
7、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,s2还包括:所述目标跟踪方法对点云数据集中的第一帧点云的处理和第i-1帧的处理方式不同。
8、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s2具体包括如下步骤:
9、s21.对所述点云数据集中的第一帧点云中的移动目标进行处理,形成第一模板点云template_point_cloud1,并记录第一模板点云中的最小点云个数min_points1和与第一帧点云对应的时间戳t1;
10、s22.在对第i帧点云追踪时,将时间戳ti输入卡尔曼滤波器进行处理,得到第i个卡尔曼滤波器预测的包围盒,将其扩大k倍后,得到第i帧搜索点云search_point_cloudi,其中,i>1且为正整数,k为正整数;
11、s23.对第i帧搜索点云search_point_cloudi进行点云个数是否过少判断;并对第i-1帧模板点云template_point_cloudi-1进行是否遮挡判断;
12、s24.在判断结果均为否时,将第i帧搜索点云search_point_cloudi和第i-1帧模板点云template_point_cloudi-1进行特征描述,并对第i-1帧模板点云template_point_cloudi-1进行粗变换,得到第i帧粗预测点云coarse_pred_point_cloudi与第i帧粗预测包围盒coarse_pred_bboxi;
13、s25.对第i帧粗预测点云coarse_pred_point_cloudi进行追踪判断,若追踪成功,则对该第i帧粗预测点云coarse_pred_point_cloudi和粗预测包围盒coarse_pred_bboxi进行处理,得到第i帧模板点云template_point_cloudi和第i帧点云的包围盒bboxi及最小点云个数min_pointsi。
14、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,还包括s26:若失败次数大于设定的阈值时,则追踪失败,整个过程结束,继续对第i+1帧点云中标定的所述移动目标采用目标跟踪方法进行追踪。
15、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s3具体包括:将最终的第i帧模板点云template_point_cloudi和第i帧点云的包围盒bboxi作为追踪结果进行显示。
16、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s23具体包括:
17、s231.将第i帧搜索点云search_poing_cloudi的点云个数与min_pointsi-1*min_rate进行比较,其中min_rate为预设的大于0而小于1的一个小数,min_pointsi-1为第i-1帧点云的点云个数,若search_point_cloudi的点云个数小于min_pointsi-1*min_rate,则搜索区域的点数过少,判定为追踪失败,转步骤s26,否则转步骤s25;
18、s232.将第i帧模板点云template_point_cloudi与第i帧点云input_point_cloudi进行处理得到第i个遮挡点数obstacle_pointsi,将obstacle_pointsi与obstacle_pointsi-1*obstacle_rate进行比较,obstacle_pointsi-1为第i-1个遮挡点数,obstacle_rate为预先设定的超参数遮挡率,若obstacle_pointsi小于obstacle_pointsi-1*obstacle_rate,则判定无遮挡,转步骤s25,否则转步骤s26。
19、本发明还提供了一种移动目标的追踪系统,所述系统实现所述的方法,包括:
20、采集模块,用于对作业现场中的移动目标进行标定并实时进行点云采集,获得点云数据集;
21、追踪模块,用于对标定的包括移动目标的点云进行处理,从而对移动目标进行追踪;
22、显示模块,用于将追踪的结果进行显示。
23、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述采集模块为雷达。
24、本发明还提供了一种计算机设备,包括:处理器和用于存储可执行指令的存储器,其中,所述处理器被配置为执行所述可执行指令,以执行本发明所述的追踪方法。
25、与现有技术相比,本发明有如下有益效果:
26、本发明相比现有技术具有如下优点:
27、本发明移动目标的追踪方法,包括:对作业现场进行点云采集,获得点云数据集;对所述点云数据集中的包括移动目标的点云进行标定;对标定的移动目标进行追踪;将追踪的结果进行显示,本发明的方法有通用性,不用事先训练,运算量小,推理速度较快,而且可追踪在移动过程中不产生形变的任意刚性物体,也不需要对不同的物体建立不同的模型进行追踪,从而与现有的行人追踪进行互补。
技术特征:
1.一种移动目标的追踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的移动目标的追踪方法,其特征在于,所述s2采用目标跟踪方法对标定的所述移动目标进行追踪,所述目标跟踪方法包括对所述点云数据集中的所有点云进行处理后,进行点云个数判断和遮挡判断,根据判断结果来进行追踪。
3.根据权利要求2所述的移动目标的追踪方法,其特征在于,s2还包括:所述目标跟踪方法对点云数据集中的第一帧点云的处理和第i-1帧点云的处理方式不同。
4.根据权利要求3所述的移动目标的追踪方法,其特征在于,所述s2具体包括如下步骤:
5.根据权利要求4所述的移动目标的追踪方法,其特征在于,还包括s26:若失败次数大于设定的阈值时,则追踪失败,整个过程结束,继续对第i+1帧点云中标定的所述移动目标采用目标跟踪方法进行追踪。
6.根据权利要求4所述的移动目标的追踪方法,其特征在于,所述s3具体包括:将最终的第i帧模板点云template_point_cloudi和第i帧点云的包围盒bboxi作为追踪结果进行显示。
7.根据权利要求5所述的移动目标的追踪方法,其特征在于,所述s23具体包括:
8.一种移动目标的追踪系统,其特征在于,所述系统实现权利要求1-7任一项所述的方法,包括:
9.根据权利要求8所述的系统,其特征在于,所述采集模块为雷达。
10.一种电子设备,其特征在于,所述电子设备包括:
技术总结
本发明涉及一种移动目标的追踪方法、系统及设备,包括以下步骤:对作业现场中的移动目标进行标定并实时进行点云采集,获得点云数据集;对标定的包括移动目标的点云进行处理,从而对移动目标进行追踪;将追踪的结果进行实时显示。本发明的方法有通用性,不用事先训练,而且可追踪在移动过程中不产生形变的任意刚性物体,也不需要对不同的物体建立不同的模型进行追踪,从而与现有的行人追踪进行互补。
技术研发人员:熊永平,郭光,叶旺平
受保护的技术使用者:北京中科创益科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!