一种采用多个UWB基站快速求解标签坐标的系统的制作方法
本发明涉及uwb定位系统,特别涉及一种采用多个uwb基站快速求解标签坐标的系统
背景技术:
1、uwb定位系统技术是一种通过超宽带信号(ultra-wideband,uwb)进行定位的技术。uwb信号是一种具有极高带宽和短脉冲宽度的无线电信号,其能够在宽频带内传输大量数据。基于uwb信号的定位系统利用信号在空间中的传播特性,通过测量信号在空间中的传播时间、幅度、相位等参数,来实现对物体位置的确定。
2、uwb定位系统的主要组成部分包括标签、基站、信号处理器和定位算法。标签是被定位物体上携带uwb收发器的装置,可以发射和接收uwb信号。基站是uwb定位系统的控制中心,可以发射uwb信号并接收标签返回的信号。信号处理器对接收到的uwb信号进行处理和分析,以提取关键的定位参数。定位算法是uwb定位系统的核心部分,利用标签和基站之间的测距信息来计算标签的三维坐标。
3、uwb定位系统技术具有以下优点:高精度、高稳定性、强抗干扰能力、大容量数据传输和低功耗等。它被广泛应用于室内定位、车辆导航、人员跟踪、物流管理等领域。
4、目前应用uwb测距和定位系统越来越多,由于uwb提供的测距精度一般只能达到±100mm左右,因此不能满足对定位精度要求更高的系统使用。
5、同时,基于传统技术中所常规应用的2个基站,采用2个2元2次方程组求解标签坐标(tx,ty)时,会产生2个共轭坐标解,因为只使用了两个基站的信息,这样的解法并不能唯一确定标签的位置,而如何确定哪一个解是正确的并非易事。
6、基于传统技术中所常规应用的3个基站,采用3个2元2次方程组求解标签坐标t[tx,ty]时,虽然可以得到唯一解,但是在实际应用中可能会遇到无解的情况。虽然目前提出了“到达角定位”toa(angle-of-arrival)和“到达时间差”tdoa(time difference ofarrival)等方法可以求解,但实际工程应用中还是存在解的取舍和精度等问题。
7、为此,提出一种采用多个uwb基站快速求解标签坐标的系统。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种采用多个uwb基站快速求解标签坐标的系统,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择;
2、本发明实施例的技术方案是这样实现的:
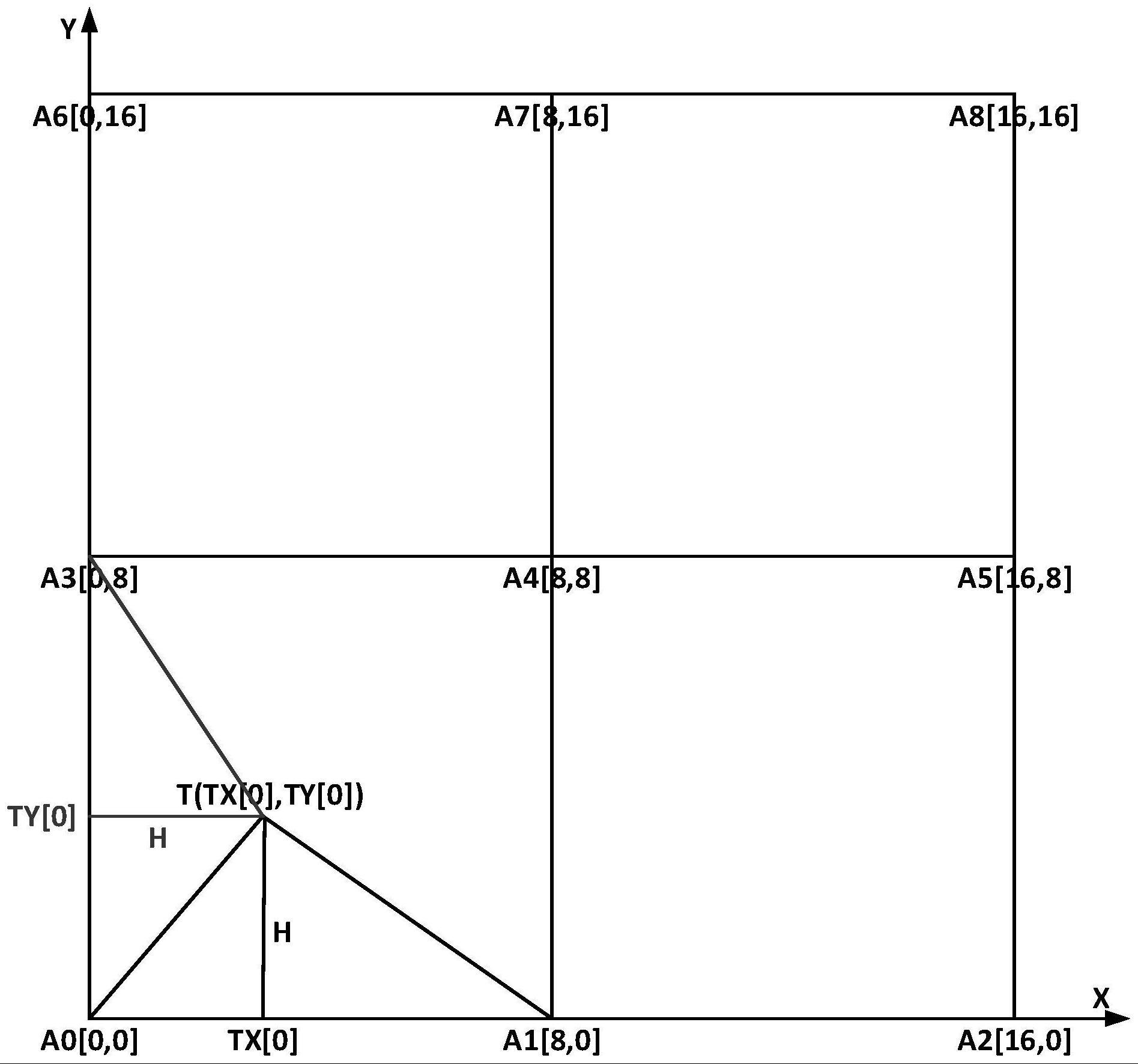
3、第一方面,一种采用多个uwb基站快速求解标签坐标的系统,包括采用多个(3个以上)uwb基站,并将多个基站布置为正方形或矩形图示为采用9个基站布局示意图,每个相邻2个基站之间的距离为8米;
4、求解标签坐标的新方法步骤如下:
5、s1、首先获取标签t到与各个基站的测距值td[i](i=0,1,2,…n,n=4,9,16,25,36…);
6、s2、找出x方向上y坐标相等、x坐标不相等的2个基站(例如a[i]和a[j]);
7、s3、确定这2个基站连线与标签到2个基站的距离td[i]和td[j]构成的三角形;
8、s4、通过三角形已知三边求高的公式,计算出2个基站连线的边对应的高h;
9、s5、计算标签tx坐标点分别到2个基站a[i]和a[j]的距离tmp1和tmp2:
10、tmp1=sqrt(td[i]*td[i]-h*h);
11、tmp2=sqrt(td[j]*td[j]-h*h);
12、s6、如果tmp1≥tmp2,则标签坐标:
13、tx=td[i]+tmp1;
14、否则,标签坐标tx=td[j]-tmp2;
15、s7、利用在x方向上y坐标相等的两个基站,一共可以找到满足以上条件的m个三角形,并求解出标签t的m个坐标值x:
16、tx[0]~tx[m-1];
17、m=n*(sqrt(n)-1)/2,其中n=4,9,16,25,36,…);
18、同理,利用在y方向上x坐标相等的两个基站,也可以求解出标签t的9个y坐标值:ty[0]-ty[8];
19、在上述实施方式中:上述模式并不局限于此;作为优选的技术方案,其还可优选选型为:将多个基站布置为等距离的正方形;同时也包含不等距离的正方形,只是解算精度会受到影响。
20、其中在一种实施方式中:因为检测到的标签到每个基站的距离存在误差和波动。标签静止时,某一时刻求解出来的9个标签坐标x和y和下一时刻求解出来的9个标签坐标x和y并不相同。因此可以通过对某一时刻9个标签的坐标x和坐标y分别进行滤波、平均等处理,求解得到该时刻比较准确的标签坐标tx和ty。同时,由于检测到的标签到每个基站的距离存在误差和波动,也有可能获得的标签坐标x或y少于9个,但仍可以通过对获得的标签坐标x和坐标y分别进行滤波、平均等处理,求解得到比较准确的标签坐标tx和ty;
21、在上述实施方式中:上述模式并不局限于此;作为优选的技术方案,其还可优选选型为:通过卡尔曼滤波进行滤波或平均化处理;其中,结合标签移动的预测模型和测量误差的统计特性,对当前时间段内获取的标签坐标值进行综合滤波处理。
22、其中在一种实施方式中:采用多个uwb基站快速求解标签坐标的系统,只需要保证安装各基站坐标ax和ay的尺寸和误差即可,不需要考虑标签与基站在z坐标方向(垂直方向)上的安装尺寸和误差。同时该方法求解过程简单明了,有利于该方法的工程应用。
23、另一方面,本技术方案基于上述系统,还通过一种用于uwb基站快速求解标签坐标的终端,其中,除去上述系统外,该终端由显示器、存储器和处理器组成,其中所述显示器和所述存储器分别与所述处理器连接;所述存储器用于存储所述系统并按照该系统的运行模式进行作业。
24、与现有技术相比,本发明的有益效果是:
25、一、传统技术中所常规应用的2个基站和3个基站求解标签坐标的方法存在一些问题,如无解、共轭坐标解等;而通过本发明所提出的定位系统及快速求解方法,通过使用多个基站同时定位,同时提高定位准确性和稳定性;并且,因对标签位置进行估计和跟踪,能够更好地处理标签在运动中的不确定性和变化,从而实现更好的标签运动跟踪效果;
26、二、相比较传统技术,通过本发明基于多个基站的滤波定位技术可以适用于更广泛的应用场景,因为它可以根据实际需求灵活地添加或减少基站的数量,以适应不同的应用场景。
技术特征:
1.一种采用多个uwb基站快速求解标签坐标的系统,包括基站,所述基站通过发射短脉冲信号来与接收器通信,且相互之间交互并确立三维位置,其特征在于:所述基站的数量至少为三个,在俯视投影视角下,每个所述基站呈阵列式均匀布置;
2.根据权利要求1所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s1中,获取标签t到与各个基站的测距值td[i](i=0,1,2,…n,n=4,9,16,25,36…)。
3.根据权利要求2所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s2中,找出x方向上y坐标相等、x坐标不相等的2个基站(a[i]和a[j])。
4.根据权利要求1~3任意一项所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s3中,确定这两个所述基站连线与标签到两个所述基站的距离td[i]和td[j]构成的三角形;
5.根据权利要求4任意一项所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s4中,计算标签tx坐标点分别到2个基站a[i]和a[j]的距离tmp1和tmp2,公式:
6.根据权利要求5所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s5中,利用在x方向上y坐标相等的两个所述基站,一共可以找到满足以上条件的m个三角形,并求解出标签t的m个坐标值x:
7.根据权利要求6所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:在所述s6中,通过卡尔曼滤波进行滤波或平均化处理;其中,结合标签移动的预测模型和测量误差的统计特性,对当前时间段内获取的标签坐标值进行综合滤波处理。
8.根据权利要求7所述的采用多个uwb基站快速求解标签坐标的系统,其特征在于:设定状态向量为:
9.一种用于uwb基站快速求解标签坐标的储存介质,包括如权利要求1~8所述的系统,其特征在于:还包括显示器、存储器和处理器,所述显示器和所述存储器分别与所述处理器连接;所述存储器用于存储所述系统。
技术总结
本发明公开了一种采用多个UWB基站快速求解标签坐标的系统,包括采用多个(3个以上)UWB基站,并将多个基站布置为等距离的正方形,图下为采用9个基站布局示意图,每个相邻2个基站之间的距离为8米;求解标签坐标的新方法步骤如下:S1、首先获取标签T到与各个基站的测距值TD[i](i=0,1,2,…n,n=4,9,16,25,36…);传统技术中所常规应用的2个基站和3个基站求解标签坐标的方法存在一些问题,如无解、共轭坐标解等;而通过本发明所提出的定位系统及快速求解方法,通过使用多个基站同时定位,同时提高定位准确性和稳定性;并且,因对标签位置进行估计和跟踪,能够更好地处理标签在运动中的不确定性和变化,从而实现更好的标签运动跟踪效果。
技术研发人员:李从心,邹泽明,张贵宝,徐恩松
受保护的技术使用者:上海华鸢机电有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!