一种基于线阵相机与地面激光雷达组合装置的测量方法
本申请涉及测绘的,尤其涉及一种基于线阵相机与地面激光雷达组合装置的测量方法。
背景技术:
1、激光扫描技术是快速高效获取空间数据的重要手段之一。激光扫描仪获取周围目标点额激光点云数据,通常情况下扫描仪配置至少由一个面阵成像设备组合的全景相机,相机用于拍摄扫描目标区域的rgb影像数据。激光扫描装置所获取的目标点云数据是建立在扫描装置局部坐标系下的一系列坐标点,相机成像设备采集的扫描区域内目标的影像坐标是建立在面阵成像设备空间坐标系下的。为实现目标点云数据与影像数据的融合,赋予点云数据rgb色彩信息,需对目标激光点云数据与影像数据完成配准。配准过程主要是根据在扫描仪局部坐标系下的激光点坐标以及相机设备安置的位姿参数,通过几何空间上的坐标变换公式计算每个激光点对应的影像坐标,将计算得到的影像坐标rgb色彩赋予对应的激光点,实现激光点云数据的色彩渲染效果。
2、全景相机与激光雷达组合观测提高了现代测绘工作的效率。目前,全景相机发展迅速,市场上出现了多种技术参数不同、工作方式不同、组合方式不同的全景相机,大致可以分为三种成像类型:相机集群型、鱼眼镜头型、缝合图像型以及全景扫描型。现阶段,市面上多数全景相机是利用至少一个面阵相机与激光扫描仪组合的测量系统,该组合形式的系统对相机的性能要求较高,相应的成本也较高。另外,面阵相机与三维激光雷达不能同步动态测量,影像采集速度较慢,需要大容量存储设备,且存在大量数据重叠;后期图像数据处理工作量较大,例如畸变校正、拼接等工作。
技术实现思路
1、有鉴于此,本申请提供一种基于线阵相机与地面激光雷达组合装置的测量方法,能够实现同一高度无需图像拼接,减小数据堆叠,所需存储空间较小,同时降低点云数据与影像数据融合难度。
2、本申请提供一种基于线阵相机与地面激光雷达组合装置的测量方法,包括:
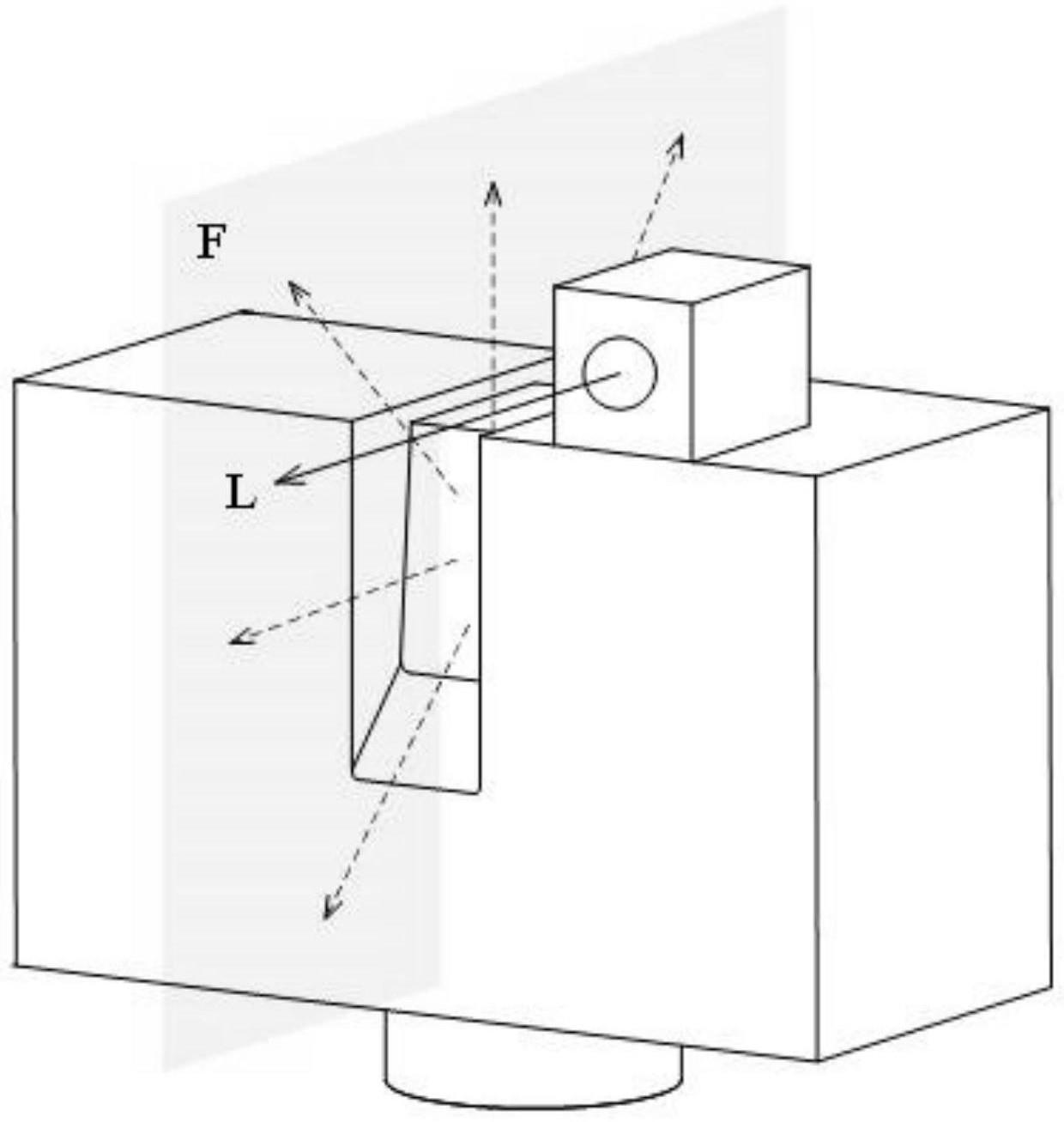
3、通过线阵相机采集图像数据,通过激光雷达采集点云数据,所述线阵相机的采集动作和激光雷达的采集动作保持同步,并且线阵相机采集数据时的扫描面与激光采集数据时的扫描面平行;
4、将所述图像数据进行校正;
5、将经过所述校正后的图像数据与所述点云数据进行配准融合。
6、可选地,所述线阵相机的数据采集动作和激光雷达的数据采集为周期性采集。
7、可选地,所述线阵相机为由多个线阵相机单元所组合成,不同线阵相机单元的主光轴共面。
8、可选地,所述校正包括:
9、利用hough变换检测椭圆,并对球形靶标边缘进行粗提取,由像素级边缘确定感兴趣区域,并将区域托大至包含模糊边缘部分;
10、建立三级灰度的边缘模型,利用zernike矩与所述边缘模型进行子像素边缘定位;
11、重复拟合椭圆,并剔除残差超出阈值的边界像素,以达到优化边界的目的,再获取椭圆边缘点纵坐标、横坐标的最大值和最小值;
12、建立球形标靶的投影模型,得到理论上椭圆在横轴方向的像素个数和实际像素个数,进而获得图像缩放比;
13、根据所述图像缩放比,利用双线性插值法对待校正图像进行校正。
14、可选地,所述边缘模型,采用以下公式,
15、
16、其中,l1为背景级灰度、l2为、l为边界级灰度,σb(xi,yi)为边缘坐标(xi,yi)处的边缘灰度分布模型的标准差,h为背景灰度,k为前景和背景的灰度差。
17、可选地,所述zernike矩,采用以下公式,
18、
19、其中,l1表示从图像原点到边缘部分下边界的距离,l2表示从图像原点到上边界的距离。δk表示边缘区域灰度的均值。
20、可选地,所述投影模型,采用以下公式,
21、
22、l1为球形靶标上的点a在像面上的投影点a'距像面中心o'的几何长度a'o',同理l2为c'o',l3为b'o',θ为球形标靶中心相对于主光轴的的高度角,f为线性相机的焦距。
23、可选地,通过以下公式获得图像缩放比,
24、
25、其中,t为缩放比,xmax为边界集m的横轴最大值、xmin为边界集m的横轴最小值、ymax为边界集m的纵轴最大值、ymin为边界集m的纵轴最小值。
26、可选地,所述配准融合的方式为,将线阵相机的坐标系、激光雷达的点云坐标系通过坐标变换所得到。
27、可选地,所述坐标变换通过以下公式进行,
28、
29、其中,点p在相片中的像素坐标为(xp,yp),点p在点云坐标系o-x′y′z′中的坐标为(xp,yp,zp),a1、a2、a3、b1、b2、b3、c1、c2、c3为旋转矩阵参数,线性相机的图像竖直方向的角度分辨率为b,线性相机的图像水平方向的角度分辨率为a。
30、本申请提出基于线阵相机与地面激光雷达组合装置的测量方法,多个线阵相机与激光扫描仪同步观测,线阵相机的扫描面与激光扫描面平行,且二者空间位置较为简单。该设备发挥线阵相机采集速度更快、分辨率更高、畸变较小等优势,线阵相机与激光扫描仪共同转动,线阵相机通过旋转角度触发式连续采集图像,获取一张360°完整的全景图像,同一高度无需图像拼接,减小数据堆叠,所需存储空间较小;成本价格相较于同等功能的设备较低;另外,点云数据与影像数据融合较为方便,更高效的完成三维场景的实时测量和色彩渲染。
技术特征:
1.一种基于线阵相机与地面激光雷达组合装置的测量方法,其特征在于,包括:
2.根据权利要求1所述测量方法,其特征在于,所述线阵相机的数据采集动作和激光雷达的数据采集为周期性采集。
3.根据权利要求1所述测量方法,其特征在于,所述线阵相机为由多个线阵相机单元所组合成,不同线阵相机单元的主光轴共面。
4.根据权利要求1所述测量方法,其特征在于,所述校正包括:
5.根据权利要求4所述测量方法,其特征在于,所述边缘模型,采用以下公式,
6.根据权利要求4所述测量方法,其特征在于,所述zernike矩,采用以下公式,
7.根据权利要求4所述测量方法,其特征在于,所述投影模型,采用以下公式,
8.根据权利要求4所述测量方法,其特征在于,通过以下公式获得图像缩放比,
9.根据权利要求4所述测量方法,其特征在于,所述配准融合的方式为,将线阵相机的坐标系、激光雷达的点云坐标系通过坐标变换所得到。
10.根据权利要求9所述测量方法,其特征在于,所述坐标变换通过以下公式进行,
技术总结
本申请公开了一种基于线阵相机与地面激光雷达组合装置的测量方法。本方法中,线阵相机的采集与激光扫描仪的采集保持同步,线阵相机的扫描面与激光扫描面平行。该设备发挥线阵相机采集速度更快、分辨率更高、畸变较小等优势,线阵相机与激光扫描仪共同转动,线阵相机通过旋转角度触发式连续采集图像,获取一张360°完整的全景图像,同一高度无需图像拼接,减小数据堆叠,所需存储空间较小;成本价格相较于同等功能的设备较低;另外,点云数据与影像数据融合较为方便,更高效的完成三维场景的实时测量和色彩渲染。
技术研发人员:毛庆洲,张旭,胡雪晴,刘新
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!