一种多自由度靶标装置及基准坐标系的建立方法与流程
本发明涉及影像测量,具体涉及一种多自由度靶标装置及基准坐标系的建立方法。
背景技术:
1、近年来,随着科学技术的发展与进步,诸多工业领域对几何量(例如长度、角度等)的测量精度与检测效率的要求不断提高,而这在很大程度上依赖于测量仪器的发展和检测技术的进步。当前,测量技术及相关学科取得了长足进步,影像坐标测量技术作为一种新型的非接触式测量手段,可以解决传统接触式测量方法难以或无法解决的多种问题,已经广泛应用于工业现场。影像坐标测量技术将非接触式的影像测量技术与常规坐标测量技术结合在一起,并应用于几何特征的测量和定位,不仅具有非接触式测量方式的效率高、操作便捷、适应性强以及可靠性高等优点,还具有成本低、机动灵活、信息丰富、实时性强等特点。
2、影像坐标测量系统以工业影像测头获取到的图像作为获取信息的手段,通过工业影像测头对被测物体进行图像采集,然后通过计算机对获取到的图像进行信息处理和读取而得到被测物体的尺寸、形位等数据。在影像坐标测量系统的应用过程中,通常需要设置基准坐标系。基准坐标系是以影像坐标测量系统工作台上的一个固定不变的点为基准而建立的一个参考基准,使得在变换了工业影像测头,或者在关机后重新启动的情况下,仍然能够根据该参考基准简便、快捷地重新恢复出各个要素之间的相互位置关系。
3、对于传统的接触式三坐标测量机而言,基准坐标系通常设置在一个固定在工作台上的标准球上,通过测量一个固定在三坐标测量机工作台上的标准球,而后以它的球心为原点来建立基准坐标系。而对于非接触式的影像坐标测量系统而言,其前端传感器为工业影像测头,不同于常规的接触式测头和激光三角法测头,其具有一定的景深范围,并且输出为被测物体的二维图像。同时,在工业影像测头的成像过程中,通过将三维场景投影到二维像面上而形成被测物体的二维图像,丢失了空间深度信息,并且无法使标准球处于工业影像测头的物方焦平面上。因此,具有空间三维特征的标准球等不适合作为影像坐标测量系统的参考基准,无法应用其建立基准坐标系。由于工业影像测头的输出为被测物体的二维图像,并且对被测物体的棱边、尖角等突变部位较为敏感,因而需要根据其自身特点来设置参考基准,以用于确定和建立影像坐标测量系统中的基准坐标系。
4、在以工业影像测头作为前端传感器的影像坐标测量系统中,需要以一个固定不变的点作为参考基准来建立基准坐标系,从而使得在变换了工业影像测头,或者在关机后重新启动的情况下,仍能根据该参考基准重新恢复出各个要素之间的相互位置关系。影像坐标测量系统通常用于实现二维平面测量,而通用的、具有空间三维特征的标准球等无法处于工业影像测头的物方焦平面上,因而不适合作为此类测量系统的参考基准。
5、因此,发明人提供了一种多自由度靶标装置及基准坐标系的建立方法。
技术实现思路
1、(1)要解决的技术问题
2、本发明实施例提供了一种多自由度靶标装置及基准坐标系的建立方法,解决了标准球无法满足影像坐标测量系统的参考基准的技术问题。
3、(2)技术方案
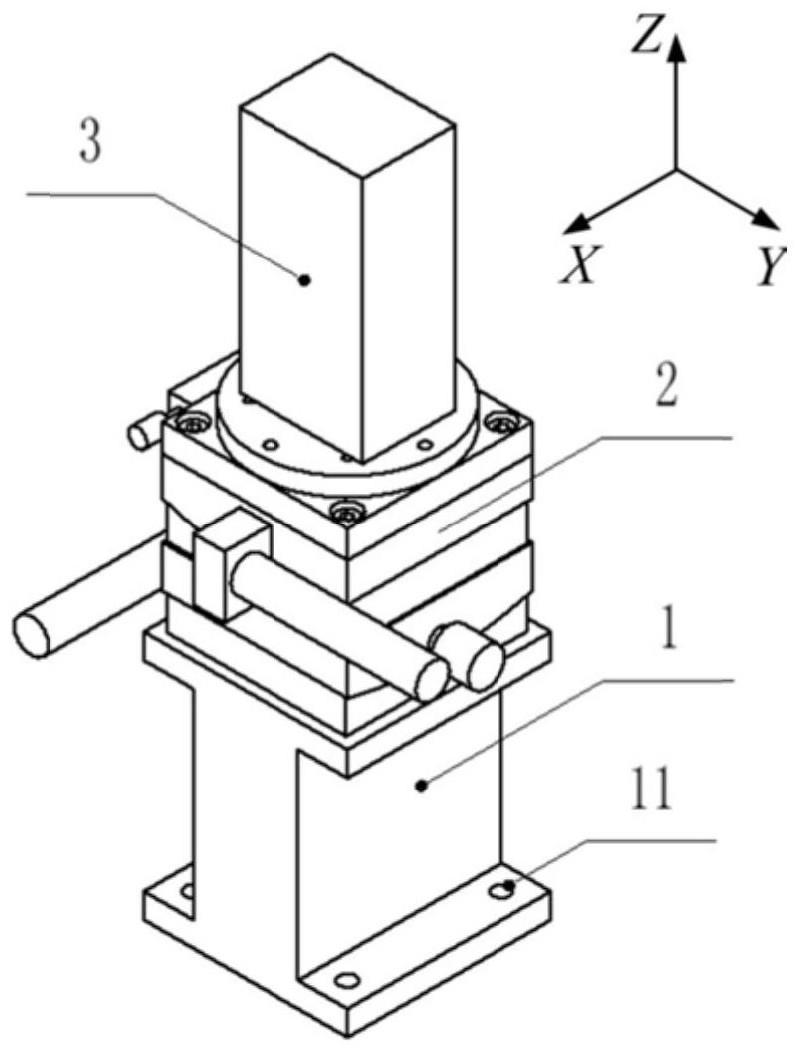
4、本发明的第一方面提供了一种多自由度靶标装置,包括底座、多自由度调整机构和基准靶标,所述多自由度调整机构安装于所述底座,所述基准靶标固定于所述多自由度调整机构;所述基准靶标为硬质合金钢材料,其形状为立方体。
5、进一步地,所述基准靶标的各个表面均为光滑、平整、纹理均匀的亚光表面。
6、进一步地,所述基准靶标的各个表面的平面度误差均≤2μm。
7、进一步地,所述基准靶标的各条棱边均为锋利、连续且完整的直边。
8、进一步地,所述多自由度调整机构包括一维手动角位台a、一维手动角位台b、一维手动旋转台、多个锁紧螺母及多个调节手柄,所述基准靶标安装于所述一维手动旋转台;
9、所述一维手动角位台a、所述一维手动角位台b依次叠加安装且分别用于在对应的所述调节手柄带动下调整所述基准靶标绕x轴的转动角度α和绕y轴的转动角度β,并通过对应的所述锁紧螺母进行位置锁紧;
10、所述一维手动旋转台叠加安装于所述一维手动角位台a或所述一维手动角位台b且用于在对应的所述调节手柄带动下调整所述基准靶标绕z轴的转动角度γ,并通过对应的所述锁紧螺母进行位置锁紧。
11、进一步地,所述多自由度靶标装置还包括防护罩,所述防护罩罩设于所述底座、所述多自由度调整机构及所述基准靶标。
12、进一步地,所述防护罩为透明材质的立方体中空壳体。
13、进一步地,所述防护罩的防护罩前表面上开设有窗口。
14、进一步地,所述防护罩用于固定在影像坐标测量系统的工作台上。
15、本发明的第二方面提供了一种基于上述多自由度靶标装置的基准坐标系的建立方法,包括以下步骤:
16、确定基准坐标系os-xsyszs的xs轴、ys轴和zs轴的正方向分别与影像坐标测量系统的机器坐标系o-xyz的x轴、y轴和z轴的正方向相同;
17、控制所述影像坐标测量系统的x轴、y轴和z轴带动工业影像测头运动,当基准靶标前表面处于所述工业影像测头的物方焦平面上时,确定x直线运动轴的光栅尺读数为基准坐标系os-xsyszs原点os的xs0坐标分量;
18、锁住x轴并沿y轴方向移动所述工业影像测头,当基准靶标前棱边处于所述工业影像测头的视场时,依据y直线运动轴的光栅尺读数、所述绝对位置靶标前棱边的图像坐标与图像中心坐标之间的像素距离,确定基准坐标系os-xsyszs原点os的ys0坐标分量;
19、锁住x轴并沿z轴方向移动所述工业影像测头,当基准靶标上棱边出现于所述工业影像测头的视场时,依据z直线运动轴的光栅尺读数、所述绝对位置靶标上棱边的图像坐标与图像中心坐标之间的像素距离,确定基准坐标系os-xsyszs原点os的zs0坐标分量;
20、依据xs轴、ys轴和zs轴的正方向以及解算出的原点os的三维坐标(xs0,ys0,zs0),建立基准坐标系os-xsyszs。
21、(3)有益效果
22、综上,本发明通过对多自由度靶标装置中的基准靶标采用特殊设计的几何结构特征,具有光滑、平整、纹理均匀的亚光表面和锋利、连续且完整的棱边,便于工业影像测头的自动对焦及边缘准确识别和提取,并且具有几何特征简单、易于加工、形位精度易于保证的特点,是工业影像测头的最佳测量对象。该方法通过工业影像测头对基准靶标进行自动对焦及边缘准确识别和提取而实现基准坐标系的建立,充分发挥了影像坐标测量系统测量平面特征的优势,并且具有原理简单、使用便捷、易于实现自动化的特点。
技术特征:
1.一种多自由度靶标装置,其特征在于,包括底座(1)、多自由度调整机构(2)和基准靶标(3),所述多自由度调整机构(2)安装于所述底座(1),所述基准靶标(3)固定于所述多自由度调整机构(2);所述基准靶标(3)为硬质合金钢材料,其形状为立方体。
2.根据权利要求1所述的多自由度靶标装置,其特征在于,所述基准靶标(3)的各个表面均为光滑、平整、纹理均匀的亚光表面。
3.根据权利要求2所述的多自由度靶标装置,其特征在于,所述基准靶标(3)的各个表面的平面度误差均≤2μm。
4.根据权利要求1-3中任一项所述的多自由度靶标装置,其特征在于,所述基准靶标(3)的各条棱边均为锋利、连续且完整的直边。
5.根据权利要求1所述的多自由度靶标装置,其特征在于,所述多自由度调整机构(2)包括一维手动角位台a(21)、一维手动角位台b(22)、一维手动旋转台(23)、多个锁紧螺母(24)及多个调节手柄(25),所述基准靶标(3)安装于所述一维手动旋转台(23);
6.根据权利要求1所述的多自由度靶标装置,其特征在于,还包括防护罩(4),所述防护罩(4)罩设于所述底座(1)、所述多自由度调整机构(2)及所述基准靶标(3)。
7.根据权利要求6所述的多自由度靶标装置,其特征在于,所述防护罩(4)为透明材质的立方体中空壳体。
8.根据权利要求6或7所述的多自由度靶标装置,其特征在于,所述防护罩(4)的防护罩前表面(41)上开设有窗口(411)。
9.根据权利要求6所述的多自由度靶标装置,其特征在于,所述防护罩(4)用于固定在影像坐标测量系统的工作台上。
10.一种基于权利要求1-9中任一项所述的多自由度靶标装置的基准坐标系的建立方法,其特征在于,该方法包括以下步骤:
技术总结
本发明涉及影像测量技术领域,具体涉及一种多自由度靶标装置及基准坐标系的建立方法,该靶标装置包括底座、多自由度调整机构和基准靶标,多自由度调整机构安装于底座,基准靶标固定于多自由度调整机构;基准靶标为硬质合金钢材料,其形状为立方体。该多自由度靶标装置及基准坐标系的建立方法的目的是解决标准球无法满足影像坐标测量系统的参考基准的问题。
技术研发人员:毕超,刘京亮,崔晓,李迪,张超
受保护的技术使用者:中国航空工业集团公司北京航空精密机械研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!