一种物体成分均匀性的测定装置的制作方法
本发明属于物体成分均匀性的测定,尤其涉及一种物体成分均匀性的测定装置。
背景技术:
1、物体成分均匀性是指物体内部各组分的分布是均匀的,即每个组分的浓度在物体内部都是相等的。也就是说,物体的每一部分都有相同的含量或浓度。从宏观上来看,物质由各种元素组成。从微观上看,物质由各种粒子构成。从宏观的角度看:物质由已经发现的一百多种元素组成。从微观上看,物质的构成有三种情况:由原子直接构成。所有的金属单质、稀有气体、固体非金属单质由原子直接构成,例如金属铁、氦气、硫单质等等。特殊的是二氧化硅,二氧化硅是由原子直接构成的。由分子构成。原子之间通过共价键形成分子,分子再构成物质。一般强酸、非金属化合物(除了铵盐)都是由分子构成的,例如二氧化碳、硫酸等等。由离子构成。原子之间通过得失电子,形成离子键,形成离子,构成物质;然而,现有物体成分均匀性的测定装置不能准确对物体成分探测;同时,当前的物体成分含量确定方式多依赖于人工操作与读数,其效率与精度均不高。
2、通过上述分析,现有技术存在的问题及缺陷为:
3、(1)现有物体成分均匀性的测定装置不能准确对物体成分探测。
4、(2)当前的物体成分含量确定方式多依赖于人工操作与读数,其效率与精度均不高。
5、(3)对物体称重不准确。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种物体成分均匀性的测定装置。
2、本发明是这样实现的,一种物体成分均匀性的测定装置包括:
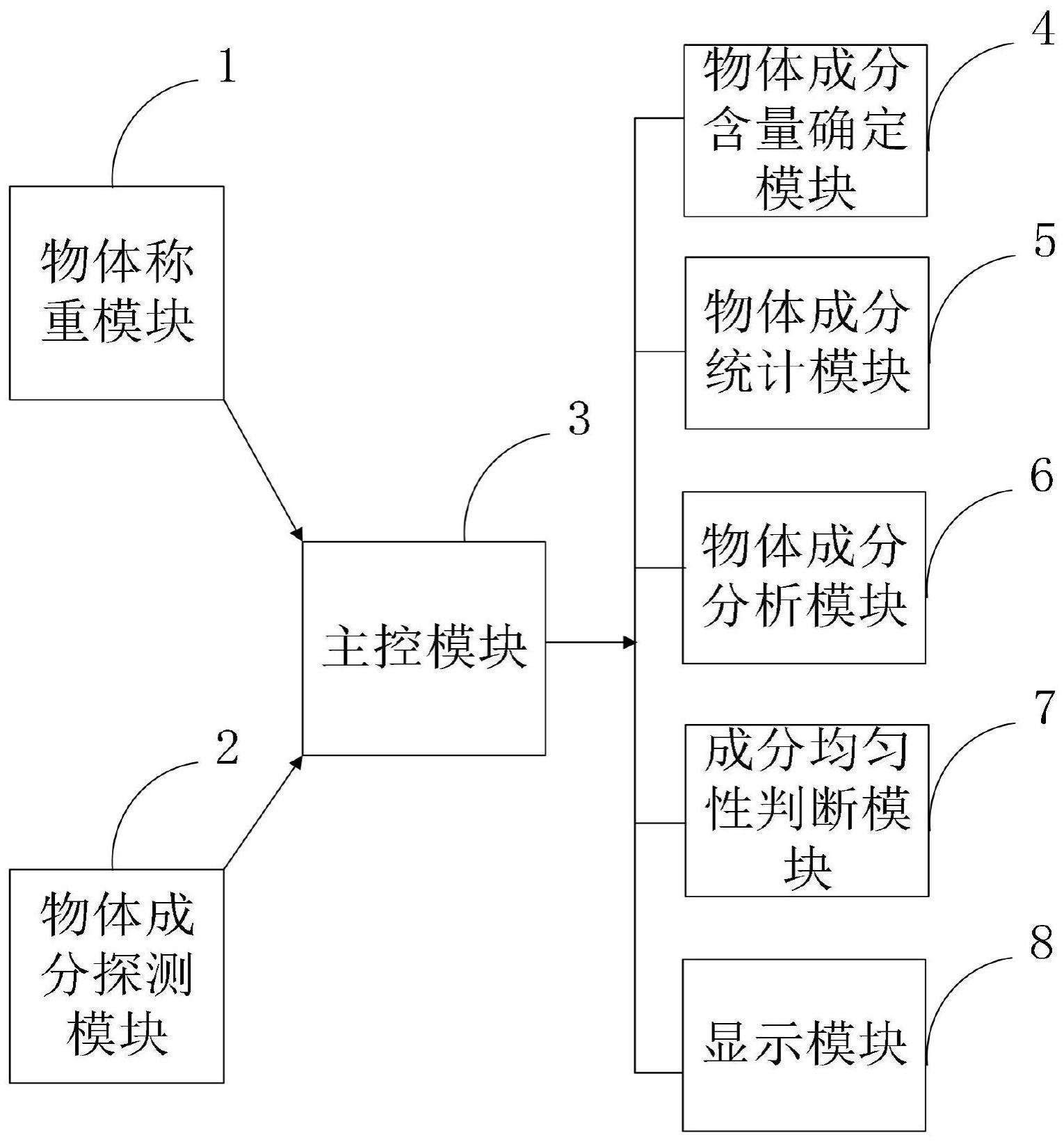
3、物体称重模块、物体成分探测模块、主控模块、物体成分含量确定模块、物体成分统计模块、物体成分分析模块、成分均匀性判断模块、显示模块;
4、物体称重模块,与主控模块连接,用于对目标物体进行称重操作;
5、所述物体称重模块称重方法:
6、称重装置的后盖设置压力传感器,通过压力传感器获取在所述称重区域放置第一待称重物体时,终端放置控件对所述后盖的第一支持力;
7、第一支持力是指将第一待称重物体放置在称重区域时,通过压力传感器获取的终端放置控件对后盖的支持力,压力传感器设置在所述称重装置的后盖;
8、根据所述第一支持力,获取所述第一待称重物体的重量;以预设方式提示所述第一待称重物体的重量;
9、物体成分探测模块,与主控模块连接,用于对目标物体成分进行探测;
10、主控模块,与物体称重模块、物体成分探测模块、物体成分含量确定模块、物体成分统计模块、物体成分分析模块、成分均匀性判断模块、显示模块连接,用于控制各个模块正常工作;
11、物体成分含量确定模块,与主控模块连接,用于确定目标物体中的成分含量;
12、物体成分统计模块,与主控模块连接,用于对目标物体成分数据进行统计;
13、物体成分分析模块,与主控模块连接,用于对目标物体成分数据进行分析;
14、成分均匀性判断模块,与主控模块连接,用于对目标物体成分均匀性进行判断;
15、显示模块,与主控模块连接,用于显示目标物体重量、成分探测信息、成分含量、统计数据、分析结果、判断结果。
16、进一步,所述物体成分探测模块探测方法如下:
17、(1)获取波形数据,对波形数据进行校正处理;所述波形数据为探测设备向不透明待测目标物体所发射的具备穿透性探测信号经过所述待测目标物体内部各介质反射后的信号数据;根据所述波形数据,通过信号反演成像,得出所述待测目标物体的内部构造截面图像;
18、(2)利用图像分割算法,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个区域;分别计算各个所述区域与所述内部构造截面图像的面积比,得出所述待测目标物体内部各个所述介质的成分占比。
19、进一步,所述根据所述波形数据,通过信号反演成像,得出所述待测目标物体的内部构造截面图像,包括:
20、根据二维雷达波形数据,通过雷达信号反演成像,得出所述待测目标物体的二维内部构造截面图像;
21、其中,所述二维雷达波形数据为利用多基线线性分布雷达同时探测所述待测目标物体获得的数据,或单基雷达单独探测所述待测目标物体获得的数据;
22、所述单基雷达单独探测所述待测目标物体的过程具体为:
23、位于预设采样点的所述单基雷达向所述待测目标物体发送雷达探测信号,接收所述待测目标物体的内部各个所述介质反射的一维波形数据;
24、基于所述预设采样点,在第一预设方向获取多个采样点的所述一维波形数据,多个所述一维波形数据构成二维雷达波形数据集。
25、进一步,所述分别计算各个所述区域与所述内部构造截面图像的面积比,得出所述待测目标物体内部各个所述介质的成分占比,包括:
26、分别计算多幅所述内部构造截面图像中的各个所述区域与所述内部构造截面图像的所述面积比;
27、根据每个所述介质对应的所述区域的多个所述面积比,计算得出每个所述区域的面积比平均值,并将所述面积比平均值作为相应所述介质的所述成分占比。
28、进一步,所述在所述分别计算各个所述区域与所述内部构造截面图像的面积比,得出所述待测目标物体内部各个所述介质的成分占比之后,还包括:
29、利用在第二预设方向上预设距离内获取的多个所述二维内部构造截面图像,构成所述待测目标物体的内部三维模型;
30、根据所述内部三维模型和所述面积比,计算得出各个所述介质的体积;
31、根据利用多基阵列化分布雷达同时探测所述待测目标物体获得的三维雷达波形数据,通过雷达信号反演成像,得出所述待测目标物体的内部三维模型;
32、根据所述内部三维模型和所述面积比,计算得出各个所述介质的体积。
33、进一步,所述利用图像分割算法,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个区域,包括:
34、利用灰度阈值分割算法、区域分割算法或边缘检测分割算法中的任一种,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个所述区域。
35、进一步,所述在所述通过信号反演成像,对所述波形数据进行反演,得出所述待测目标物体的内部构造截面图像之后,利用图像分割算法,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个区域之前,还包括:
36、对所述内部构造截面图像进行图像预处理操作;
37、其中,所述图像预处理操作至少包括倾斜矫正、裁切、去噪、增强及栅格化。
38、进一步,所述物体成分含量确定模块确定方法如下:
39、1)配置质量测量器参数,通过质量测量器,获取所述待测目标物体在第一介质中的第一质量,以及所述待测目标物体在第二介质中的第二质量;
40、2)根据所述第一质量以及所述第二质量信息,来确定所述待测目标物体中包含的待测成分的含量信息。
41、进一步,所述根据所述第一质量以及所述第二质量信息,来确定所述待测目标物体中包含的待测成分的含量信息包括以下步骤:
42、通过环境传感器来分别获取所述第一介质与所述第二介质的环境信息,其中,所述环境信息影响介质的密度信息;
43、根据所述环境信息来确定所述第一介质以及所述第二介质各自的密度信息;
44、根据所述第一质量以及所述第二质量信息,并结合所述第一介质的密度信息、第二介质的密度信息以及所述待测成分的预定密度,来确定所述待测目标物体中包含的待测成分的含量。
45、进一步,所述确定方法还包括以下步骤:
46、根据所述含量信息,获取与所述含量信息对应的单价信息,以确定所述待测目标物体的价格。
47、结合上述的技术方案和解决的技术问题,请从以下几方面分析本发明所要保护的技术方案所具备的优点及积极效果为:
48、第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
49、本发明通过物体成分探测模块获取波形数据,波形数据为探测设备向不透明待测目标物体所发射的具备穿透性探测信号经过所述待测目标物体内部各介质反射后的信号数据;根据所述波形数据,通过信号反演成像,得出所述待测目标物体的内部构造截面图像;利用图像分割算法,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个区域;分别计算各个所述区域与所述内部构造截面图像的面积比,得出所述待测目标物体内部各个所述介质的成分占比,探测准确;同时,通过物体成分含量确定模块可以自动测量待测目标物体中的待测成分的含量,无需人工参与,提高了测量的效率,并且,通过增加环境传感器,能够得到更加精确的介质的密度,从而相应地提高所述含量信息的精度,减少由于环境因素改变而带来的误差。
50、本发明通过物体称重模块可以准确对目标物体进行称重。
51、第二,把技术方案看做一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
52、本发明通过物体成分探测模块获取波形数据,波形数据为探测设备向不透明待测目标物体所发射的具备穿透性探测信号经过所述待测目标物体内部各介质反射后的信号数据;根据所述波形数据,通过信号反演成像,得出所述待测目标物体的内部构造截面图像;利用图像分割算法,将同属于一种介质的像素点划分至同一区域,以将所述内部构造截面图像分割成多个区域;分别计算各个所述区域与所述内部构造截面图像的面积比,得出所述待测目标物体内部各个所述介质的成分占比,探测准确;同时,通过物体成分含量确定模块可以自动测量待测目标物体中的待测成分的含量,无需人工参与,提高了测量的效率,并且,通过增加环境传感器,能够得到更加精确的介质的密度,从而相应地提高所述含量信息的精度,减少由于环境因素改变而带来的误差。
- 还没有人留言评论。精彩留言会获得点赞!