影像定位方法、装置、电子设备及存储介质与流程
本发明涉及图像处理,尤其涉及一种影像定位方法、装置、电子设备及存储介质。
背景技术:
1、在摄影测量和测绘领域,使用拍摄的影像进行三维重建,是目前获取城市和各种地物目标高精度三维模型和其它地理信息数据的一种主要手段。为了使生产的数据具有精确的地理坐标位置信息,目前通用的做法是在目标区域内,通过实时差分定位或全站仪采集一定数量的外业控制点,然后在影像的空中三角测量处理阶段引入这些外业控制点进行有控平差,来实现影像的地理定位。
2、地理信息数据为了保持时效性,需要定期进行数据更新,因此如何对于新拍摄影像进行高效定位已经成为业界亟待解决的问题。
技术实现思路
1、本发明提供一种影像定位方法、装置、电子设备及存储介质,用以解决现有技术中如何对于新拍摄影像进行高效定位的问题。
2、本发明提供一种影像定位方法,包括:
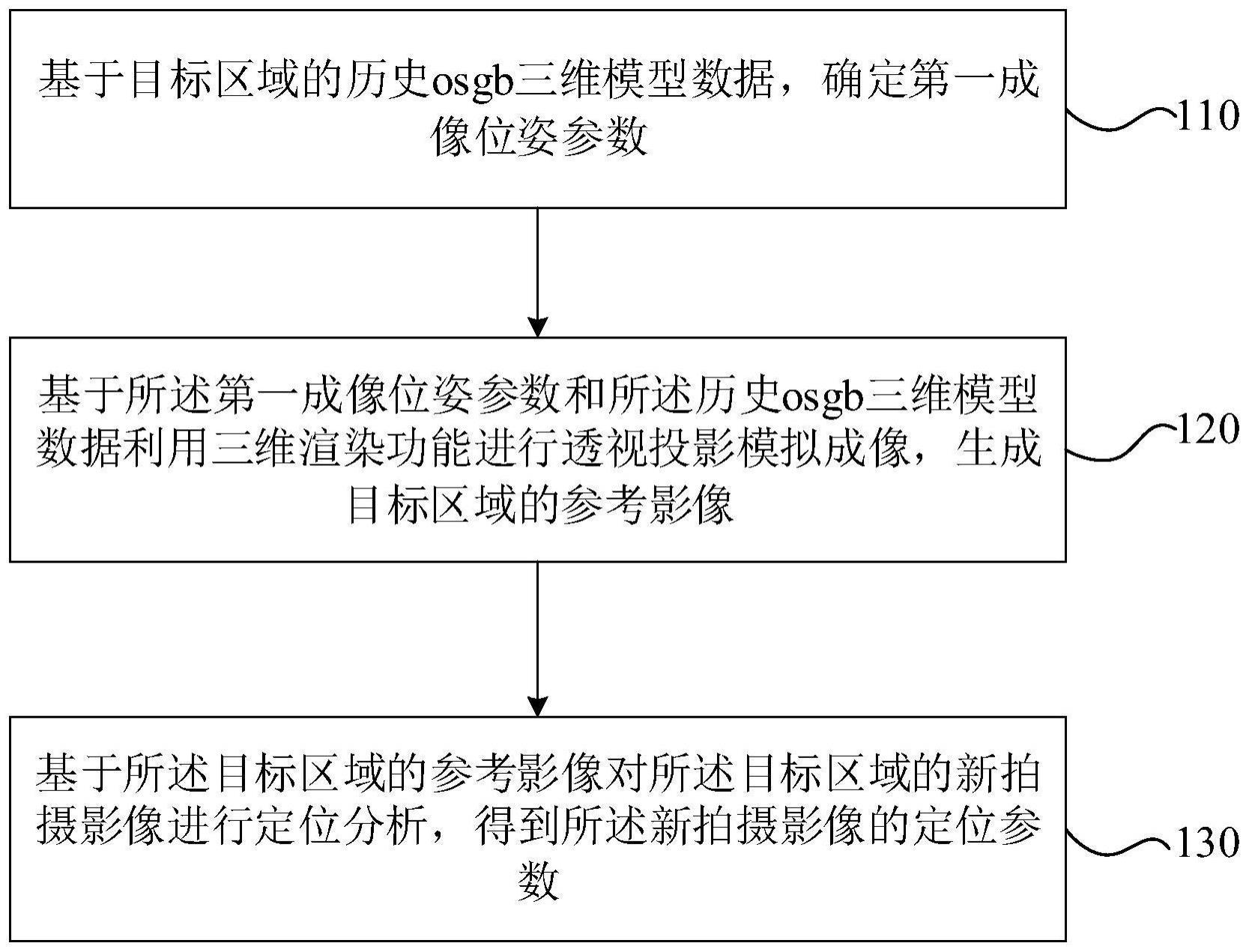
3、基于目标区域的历史osgb三维模型数据,确定第一成像位姿参数;
4、基于所述第一成像位姿参数和所述历史osgb三维模型数据利用三维渲染功能进行透视投影模拟成像,生成目标区域的参考影像,其中,所述目标区域的参考影像携带有精确定位参数信息;
5、基于所述目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数。
6、根据本发明提供的一种影像定位方法,所述基于目标区域的历史osgb三维模型数据,确定第一成像位姿参数,包括:
7、基于拍摄距离信息、拍摄方式信息和拍摄相机参数信息,根据无人机航线规划算法,生成对应的航线信息,并根据所述航线信息确定所述第一成像位姿参数;
8、或,接收用户输入的第二成像位姿参数,将所述第二成像位姿参数作为所述第一成像位姿参数。
9、根据本发明提供的一种影像定位方法,所述基于所述目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数,包括:
10、基于目标区域的参考影像对所述目标区域的新拍摄影像进行空中三角测量处理,得到处理结果,其中,所述处理结果中包括:自由网坐标系下的每张影像的内外参数信息,每个空三连接点的物方三维坐标和每个连接点的像点观测信息;
11、基于所述参考影像携带的精确定位参数信息和所述处理结果进行所述新拍摄影像的控制定位,得到所述新拍摄影像的定位参数。
12、根据本发明提供的一种影像定位方法,基于所述参考影像携带的精确定位参数信息和所述处理结果进行所述新拍摄影像的控制定位,得到所述新拍摄影像的定位参数,包括:
13、基于所述精确定位参数信息和所述参考影像之间的同名点观测信息,生成多个控制点;
14、根据各个所述控制点在所述新拍摄影像上的像点观测信息,建立反投影误差约束方程;
15、通过最小二乘平差技术对所述反投影误差约束方程进行解算分析,得到所述新拍摄影像的定位参数。
16、本发明还提供一种影像定位装置,包括:
17、确定模块,用于基于目标区域的历史osgb三维模型数据,确定第一成像位姿参数;
18、生成模块,用于基于所述第一成像位姿参数和所述历史osgb三维模型数据利用三维渲染功能进行透视投影模拟成像,生成目标区域的参考影像,其中,所述目标区域的参考影像携带有精确定位参数信息;
19、定位模块,用于基于所述目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数。
20、根据本发明提供的一种影像定位装置,所述确定模块,具体用于:
21、基于拍摄距离信息、拍摄方式信息和拍摄相机参数信息,根据无人机航线规划算法,生成对应的航线信息,并根据所述航线信息确定所述第一成像位姿参数;
22、或,接收用户输入的第二成像位姿参数,将所述第二成像位姿参数作为所述第一成像位姿参数。
23、根据本发明提供的一种影像定位装置,所述定位模块,具体用于:
24、基于目标区域的参考影像对所述目标区域的新拍摄影像进行空中三角测量处理,得到处理结果,其中,所述处理结果中包括:自由网坐标系下的每张影像的内外参数信息,每个空三连接点的物方三维坐标和每个连接点的像点观测信息;
25、基于所述参考影像携带的精确定位参数信息和所述处理结果进行所述新拍摄影像的控制定位,得到所述新拍摄影像的定位参数。
26、根据本发明提供的一种影像定位装置,所述装置还用于:
27、基于所述精确定位参数信息和所述参考影像之间的同名点观测信息,生成多个控制点;
28、根据各个所述控制点在所述新拍摄影像上的像点观测信息,建立反投影误差约束方程;
29、通过最小二乘平差技术对所述反投影误差约束方程进行解算分析,得到所述新拍摄影像的定位参数。
30、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述影像定位方法。
31、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述影像定位方法。
32、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述影像定位方法。
33、本发明提供的影像定位方法、装置、电子设备及存储介质,利用目标区域的历史osgb三维模型数据进行模拟成像,生成目标区域的参考影像,这些参考影像是通过设定的定位参数,根据严格的透视投影成像原理进行模拟生成的,可以认为是已知定位参数的真值数据,然后充分利用同一目标区域中的历史osgb三维模型数据和新拍摄影像中没有发生变化的区域特征,基于目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数。
技术特征:
1.一种影像定位方法,其特征在于,包括:
2.根据权利要求1所述的影像定位方法,其特征在于,所述基于目标区域的历史osgb三维模型数据,确定第一成像位姿参数,包括:
3.根据权利要求1所述的影像定位方法,其特征在于,所述基于所述目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数,包括:
4.根据权利要求3所述的影像定位方法,其特征在于,基于所述参考影像携带的精确定位参数信息和所述处理结果进行所述新拍摄影像的控制定位,得到所述新拍摄影像的定位参数,包括:
5.一种影像定位装置,其特征在于,包括:
6.根据权利要求5所述的影像定位装置,其特征在于,所述确定模块,具体用于:
7.根据权利要求5所述的影像定位方法,其特征在于,所述定位模块,具体用于:
8.根据权利要求7所述的影像定位方法,其特征在于,所述定位模块,具体用于:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至4任一项所述影像定位方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述影像定位方法。
技术总结
本发明提供一种影像定位方法、装置、电子设备及存储介质,涉及图像处理技术领域,包括:基于目标区域的历史osgb三维模型数据,确定第一成像位姿参数;基于所述第一成像位姿参数和所述历史osgb三维模型数据利用三维渲染功能进行透视投影模拟成像,生成目标区域的参考影像,其中,所述目标区域的参考影像携带有精确定位参数信息;基于所述目标区域的参考影像对所述目标区域的新拍摄影像进行定位分析,得到所述新拍摄影像的定位参数。
技术研发人员:鲁路平
受保护的技术使用者:武汉天远视科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!