一种接触分离模式摩擦电传感器及其制备方法和应用
本发明属于摩擦纳米发电机,具体涉及一种接触分离模式摩擦电传感器及其制备方法和应用。
背景技术:
1、近几十年来,由于其固有的柔韧及轻便性,可穿戴或柔性电子设备作为一个快速发展的研究领域而出现。它提供了广泛的应用,像是运动监测,康复理疗,人机界面(hmi),疾病诊断等等。其中,各种可穿戴传感器附着在皮肤上或直接戴在身上,来进行感知信息收集,并有望区分不同的身体行为。比如具有深度学习信号处理的智能袜子和多自由度外骨骼感知系统被分别开发用于步态分析和姿势感知。这种可穿戴的感知系统将人类活动数字化并建立基于数据的健康状况和活动管理,从而弥合了人类和机器之间的间隙。同时,随着第五代无线网络的显着进度,可以忽略信息传输的延迟,并且所有感官信息都可以上传到云中,以通过物联网和大数据进行远程分析和数据可视化。正常来说,可穿戴传感器配合无缝数据交换以进行人体运动检测,将有助于智能医疗保健应用。
2、摩擦纳米发电机作为一种能量产生单元,在其内部的电路中,由于摩擦起电效应,两个摩擦电极性不同的摩擦材料薄层之间会发生电荷转移而使得二者之间形成一个电势差;在外部电路中,电子在电势差的驱动下在两个分别粘贴在摩擦电材料层背面的电极之间或者电极与地之间流动,从而来平衡这个电势差。摩擦纳米发电机的动力源既可以是已被人们认识的风力、水力、海浪等大能源,也可以是人的行走、身体的晃动、手的触摸、下落的雨滴等常被人忽视的环境随机能源,还可以是车轮的转动、机器的轰鸣等。因此,摩擦纳米发电机(teng)凭借其自身产生的信号和较低的功耗这两个特点,正受到越来越多的关注,尤其是在大规模物联网应用场景中。更重要的是,由于独特的操作机制,摩擦电传感器在制造技术和材料方面有多种选择。
3、最近,人们陆续从自然界中获得了灵感,并开发了模拟人类皮肤的多层传感器。该领域的未来突破需要更高的传感器密度和不同传感器模式的更大集成,就像嵌入人体皮肤中的受体一样。同时,需要具有较少复杂结构和集成机制的制造方案来实现可扩展的大规模传感。最后,在传感系统设计过程中还应考虑硬件和数据驱动算法,以感测大量传感数据并实现闭环任务。
技术实现思路
1、针对现有技术存在的不足,本发明提供一一种接触分离模式摩擦电传感器及其制备方法和应用,利用微电子电路打印机在改性eva海绵表面打印叉指电极,作为柔性摩擦纳米发电机基础输出电极;在一半的叉指电极表面喷涂一层ptfe薄膜,作为下摩擦层,在另一半没喷涂的电极层上再打印一次电极,使两部分厚度一致,兼具摩擦层和导电层的功能;在柔性pet表面依次旋涂pva和丙烯荧光层,共计六次,成品作为上摩擦层;基于相同制造工艺制备了不同大小规格的柔性可穿戴摩擦电传感器,将其用于人体大关节运动监测和手势数字信号监测;结合配套搭建的多输入卷积深度学习网络,该传感器还可用于足型、步态和人物识别,整体正确率高于99%。
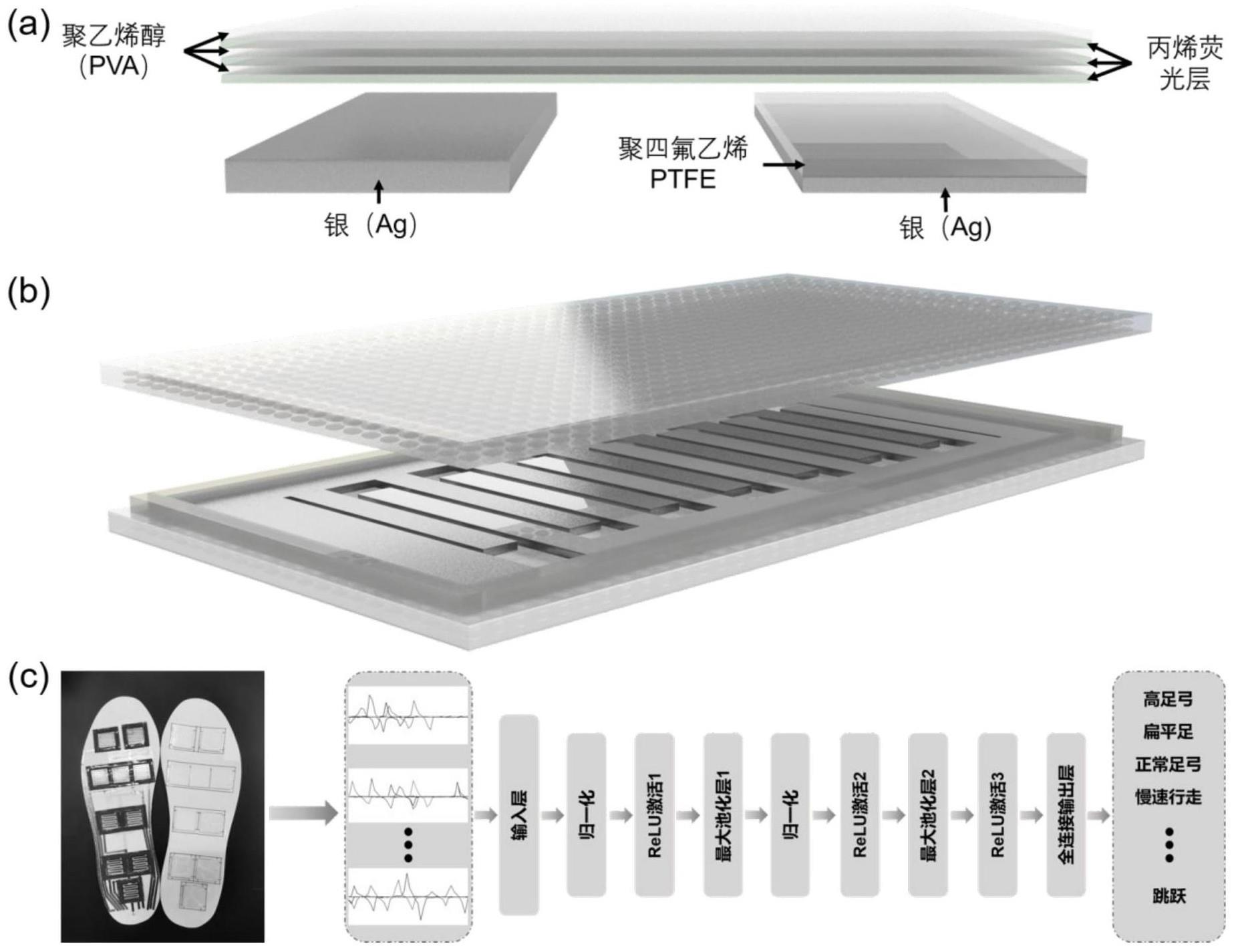
2、为了实现上述目的,本发明采用如下的技术方案:一种接触分离模式摩擦电传感器,所述摩擦电传感器的基础构型是接触分离模式,高密度eva海绵表面的ag叉指电极和ptfe喷涂层作为下摩擦层和多层叠加的pva-丙烯荧光层作为上摩擦层。
3、进一步的,所述接触分离模式摩擦电传感器从上至下依次是pva薄膜、丙烯荧光层、pva薄膜、丙烯荧光层、pva薄膜、丙烯荧光层和叉指电极层,所述叉指电极层包括双层打印电极和ptfe喷涂层叠加单层打印电极;
4、或,所述接触分离模式摩擦电传感器的最大输出功率为286.84μw。
5、进一步的,在同一绝缘的摩擦层表面可同时在不同部位聚集性质相反的电荷。
6、进一步的,多个所述传感器能够构建鞋垫式传感阵列,上摩擦层和下摩擦层的间距为1mm,叉指电极的宽度和指间距为1mm;
7、或,所述鞋垫式传感阵列其内部的双层打印电极被统一接地,各自的单层打印电极作为有用信号输出电极。
8、进一步的,
9、所述打印电极所用材料为au、ag和cu纳米颗粒中的一种,所述双层打印的电极厚度为20微米,所述单层打印电极厚度为10微米;
10、或,所述高密度eva海绵厚度为1毫米。
11、一种接触分离模式摩擦电传感器的制备方法,
12、(1)制备表面改性高密度eva海绵基底;
13、(2)制备单层及双层打印电极;
14、(3)制备多层叠加的pva-丙烯荧光层作为上摩擦层;
15、(4)制备接触分离模式的摩擦电传感器;
16、(5)针对具体应用环境设计制造对应规格的摩擦电传感器和传感阵列。
17、进一步的,
18、所述步骤(1)的具体步骤包括:
19、(1-1)将高密度eva海绵置于烧杯内,倒入50ml乙醇,将烧杯用保鲜膜封口后置于超声清洗机内,进行30min超声清洗;
20、(1-2)将步骤(1-1)清洗完成的海绵从烧杯中取出,用去离子水反复冲洗3次,放入真空干燥箱内于60℃环境下干燥1小时;
21、(1-3)将步骤(1-2)所得海绵平铺在紫外光清洗机的腔室内,用紫外光对海绵的单面进行照射改性,时间为5min;
22、或,所述步骤(2)的具体步骤包括:
23、(2-1)用dp500微电子打印机在改性eva海绵表面先打印一层叉指电极,完成后置于60℃真空干燥箱内1小时;
24、(2-2)将固含量为60%的ptfe乳液超声震荡10分钟,用事先制作好的镂空模具罩在打印电极表面,只露出一半的电极,用喷枪在电极表面均匀喷涂ptfe乳液一次,将所得物置于60℃的真空干燥箱内2小时;
25、(2-3)将(2-2)中所得产物再置于dp500打印台上的原位置处,在未喷涂ptfe乳液的电极表面再打印一层电极,完成后置于60℃真空干燥箱内1小时;
26、或,所述步骤(3)的具体步骤包括:
27、(3-1)在20ml去离子水中加入3g pva颗粒,将混合物置于90℃环境中水浴并磁力搅拌3小时,完成后取出烧杯待温度降至36℃并保持;
28、(3-2)将(3-1)所得粘稠溶液旋涂在柔性pet的表面,第一阶段以1070转/分的转速旋转18s,第二阶段以2510转/分的转速旋转60s,之后将所得物置于60℃真空干燥箱内1小时;
29、(3-3)在(3-2)所得pva薄膜表面旋涂一层丙烯荧光层,旋涂参数与(3-2)同,之后将所得物置于60℃真空干燥箱内1小时;
30、(3-4)将(3-2)和(3-3)的操作再依次重复两次;
31、或,所述步骤(4)的具体步骤包括:
32、用导电银胶把两条杜邦线分别接在两个电极的对外输出触点上;用四棱柱状,横切面为边长1mm的正方形的细条形橡胶在叉指电极四周垫起1mm高的隔断,并在隔断顶部涂上一层防水密封胶;按照隔断所围形状剪出相同规格的上摩擦层,将摩擦层面对电极贴在隔断上,置于60℃真空干燥箱内1小时;
33、或,所述步骤(5)的具体步骤包括:
34、根据所感测身体部位的不同来按照步骤(4)制作不同大小规格的摩擦电传感器。
35、一种接触分离模式摩擦电传感器的应用,
36、所述摩擦电传感器应用于摩擦发电运动检测系统,所述摩擦电运动检测系统可用于检测人体不同关节处运动特征并能做到手势数字、足型、行进姿态和人物个体的识别。
37、进一步的,所述摩擦电运动检测系统包括摩擦电传感器及其阵列、信号处理模块、wifi数据传输模块、单片机数据采集模块、上位机数据显示模块和根据具体输入特性搭建的cnn深度学习分类网络。
38、进一步的,将实验中获取的摩擦电传感器两端的电流接入信号处理模块,处理完成后接入单片机的adc数据采集口并通过wifi模块可实现在上位机实时观察运动刺激下摩擦电传感器的脉冲波形,对五路信号进行协同分析就可解析出手势数字,对十路信号进行协同分析就可解析出足型、行进姿态和人物个体。
39、本发明一种接触分离模式摩擦电传感器及其制备方法和应用的有益之处:
40、(1)使用pva-丙烯荧光层/ptfe-ag接触分离模式构型设计摩擦电运动传感器实现传感系统自驱动。pva-丙烯荧光层/ptfe-ag摩擦电传感器的核心部分是内部的叉指电极和多层叠加的pva-丙烯荧光层,用于手腕、手肘、膝盖和胯部的摩擦电传感器尺寸均为10cm×5cm×0.3cm;用于手指的摩擦电传感器尺寸为5cm×1cm×0.3cm;用于足型、步态和人物个体识的摩擦电传感器尺寸为1.7cm×1.6cm×0.3cm。该型传感器在受到外部机械刺激下可自行产生相应的脉冲电压和电流,从而无需外接供电设备。
41、(2)相比普通的运动检测传感器,基于接触分离模式构型设计摩擦电传感器对外部机械刺激的响应速度更快(对手指弯曲的响应速度为42ms),可以满足在机械手训练检测和机体康复监测领域高度响应精确度的需求。
42、(3)将传感器两端的输出电流接入信号处理电路,将电流转电压后再对信号进行放大并滤波,之后接入单片机的adc数据采集口并通过wifi模块可实现在上位机实时观察运动刺激下摩擦电传感器的电压脉冲波形。将各种信号数据保存并预处理后导入cnn网络即可解析出运动部位、足型、行进姿态、手势数字及人物个体。
- 还没有人留言评论。精彩留言会获得点赞!