基于去趋势项的无迹卡尔曼滤波视线跟踪的方法和系统
本发明属于自动化制导,更具体地,涉及一种基于去趋势项的无迹卡尔曼滤波视线跟踪方法和系统。
背景技术:
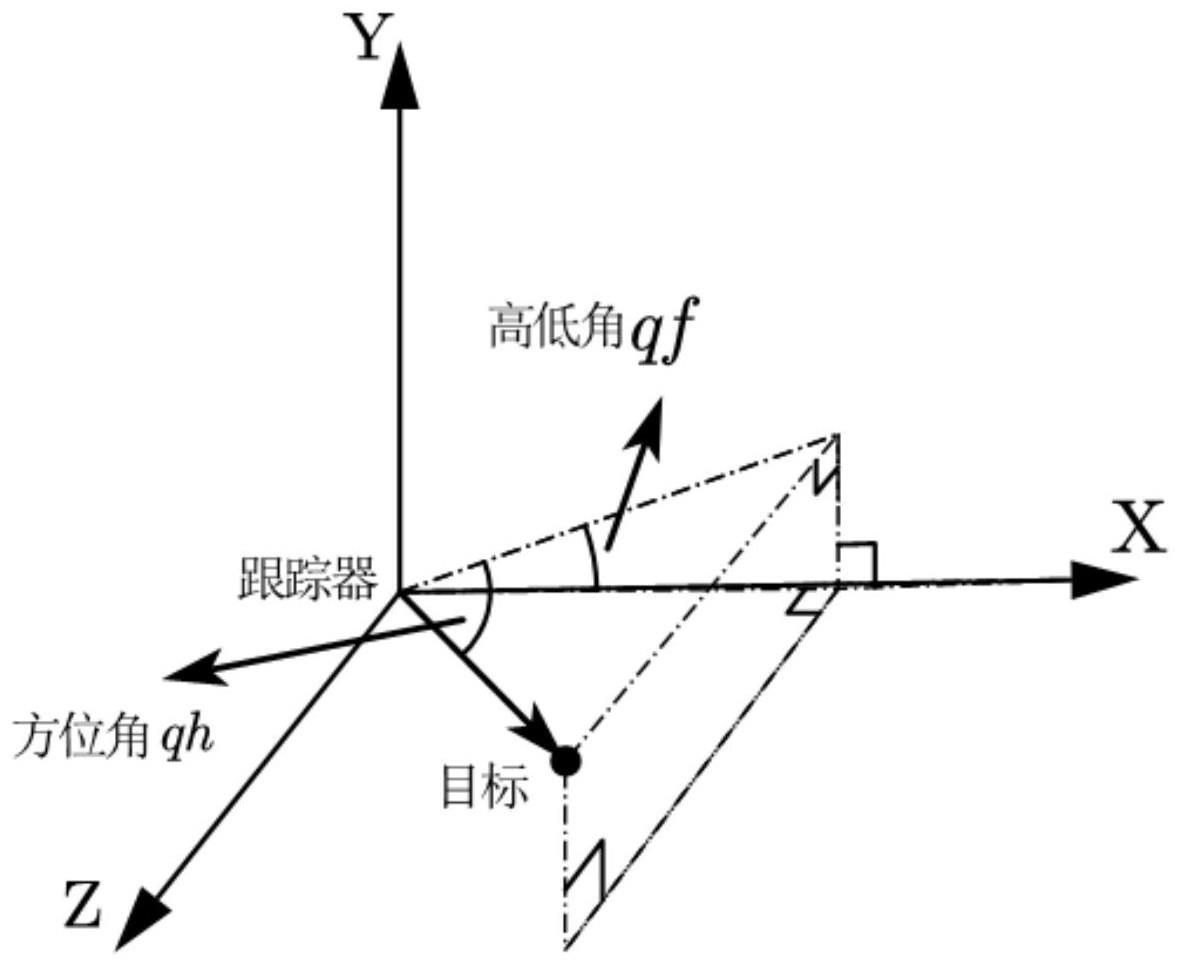
1、近些年来,目标跟踪一直是一个重要研究课题。由于现实世界中,跟踪器一般只能获得带扰动的自身位置信息,可以通过如图1所示的视线角和视线角速度这类量测信息对带扰动的信息进行修正。这种对目标进行视线跟踪的滤波系统是高度非线性的。扩展卡尔曼滤波(extended kalman filter,ekf)和容积卡尔曼滤波(cubature kalman filter,ckf)都可用于视线跟踪。而在视线角和视线角速度作为量测量的视线跟踪中,无迹卡尔曼滤波(unscented kalman filter,ukf)相较于ekf和ckf的跟踪效果更好。
2、但在应用ukf时,系统中的噪声需要满足是高斯白噪声的条件。为此,在包含有色噪声的基础上应用ukf时,通常采用状态扩增法或者动态修正噪声协方差矩阵,来解决噪声为有色噪声的问题,以期望削弱有色噪声对滤波估计的影响。不过,由于状态扩增法扩展了状态的维数,滤波过程中的数值积分结果不稳定;动态修正噪声协方差矩阵在处理非高斯噪声污染问题时,将非高斯分布的有色噪声视为协方差较大的高斯白噪声,这会使滤波状态估值的协方差过于保守,导致滤波精度下降。
3、由此可见,对噪声较为严格的约束条件限制了ukf算法的应用。本发明提供了一种基于去除趋势项将噪声白化的方法,提高了ukf算法的鲁棒性以及应用范围。
技术实现思路
1、针对现有的在有色噪声上应用ukf技术的缺陷或改进需求,本发明提供了一种基于去趋势项的ukf视线跟踪的方法和系统,其关键在于解决ukf只能应用在量测方程噪声是高斯白噪声的视线跟踪上的问题。本发明能在量测方程噪声是有色噪声的一般实际问题上应用ukf。
2、本发明提供了一种基于去趋势项的ukf视线跟踪方法,包括:
3、s1.获得基于ukf视线跟踪的量测方程噪声序列;
4、s2.通过clamped b样条函数对量测方程噪声均值序列进行拟合,去除其中的趋势项;其中,所述clamped b样条函数的节点序列非均匀,按照以下过程确定:
5、将量测方程噪声均值序列作为控制点,计算每个控制点的尖锐指标和陡峭指标;利用尖锐指标和陡峭指标中较大值组成新的序列,对新的序列进行归一化处理后,与控制点序列首尾之间需要设置的节点数相乘,得到相邻控制点之间设置的节点数指标;所述尖锐指标表示曲线的尖锐程度,取值越小表示曲线越光滑,取值越大表示曲线越尖锐;陡峭指标表示曲线的陡峭程度,取值越小表示曲线越平缓,取值越大表示曲线越陡峭;
6、根据相邻控制点之间设置的节点数指标确定节点序列。
7、进一步地,当相邻控制点之间设置的节点数指标大于设定阈值m时,将该节点数指标置为m。
8、进一步地,根据相邻控制点之间设置的节点数指标确定节点序列,具体过程为:
9、根据不等式确定节点ui数值的整数部分(ki-1);
10、计算(i-p)相对于的偏移量与区间的长度的比值确定ui数值的小数部分
11、ak为第(k-1)个控制点和第k个控制点之间应设置的节点数指标,ki是用于计算ui的参数,p表示clamped b样条函数阶数。
12、本发明还提供了一种基于去趋势项的ukf视线跟踪系统,包括:
13、量测方程噪声序列获取模块,获取基于ukf视线跟踪的量测方程噪声序列;
14、clamped b样条拟合模块,用于通过clamped b样条函数对量测方程噪声均值序列进行拟合,去除其中的趋势项;所述clamped b样条拟合模块包括尖锐指标计算单元,用于计算每个控制点的尖锐程度;
15、陡峭指标计算单元,用于计算每个控制点的陡峭程度;
16、节点数指标获取单元,用于利用尖锐指标和陡峭指标中较大值组成新的序列,对新的序列进行归一化处理后,与控制点序列首尾之间需要设置的节点数相乘,得到相邻控制点之间设置的节点数指标;
17、节点序列计算单元,用于根据相邻控制点之间设置的节点数指标确定节点序列。
18、总体而言,通过本发明所构思的以上方案与现有技术方案相比,能够取得下列有益效果。
19、(1)通过本发明提供的非均匀节点设置方法能够让clamped b样条曲线的拟合效果更好。现有clamped b样条曲线拟合研究中一般直接采用了均匀节点序列,这样得到的clamped b样条函数在尖锐指标或者陡峭指标大的地方,拟合效果往往不好,进而导致滤波结果不好。而本发明引入指标序列综合考虑了控制点的尖锐指标和陡峭指标的影响,得到综合尖锐指标和陡峭指标的非均匀节点序列的clamped b样条函数用于去除趋势项后,ukf的滤波精度更高。
20、(2)本发明提供的一种基于去除趋势项将噪声白化的方法,提高了ukf算法的鲁棒性以及应用范围。经典的ukf方法要求噪声是高斯白噪声。当量测方程噪声是有色噪声时,现有主流方案中的状态扩增法和动态修正噪声协方差都有着各自的局限性。而本发明通过综合尖锐指标和陡峭指标的非均匀节点序列的clamped b样条函数去除量测方程噪声趋势项,能更好地消去有色量测方程噪声对ukf的影响,减小滤波偏差,具有更高的鲁棒性和精度。
技术特征:
1.一种基于去趋势项的ukf视线跟踪方法,其特征在于,包括:
2.根据权利要求1所述的一种基于去趋势项的ukf视线跟踪方法,其特征在于,当相邻控制点之间设置的节点数指标大于设定阈值m时,将该节点数指标置为m。
3.根据权利要求1所述的一种基于去趋势项的ukf视线跟踪方法,其特征在于,根据相邻控制点之间设置的节点数指标确定节点序列,具体过程为:
4.一种基于去趋势项的ukf视线跟踪系统,其特征在于,包括:
5.根据权利要求4所述的一种基于去趋势项的ukf视线跟踪系统,其特征在于,当相邻控制点之间设置的节点数指标大于设定阈值m时,将该节点数指标置为m。
6.根据权利要求4所述的一种基于去趋势项的ukf视线跟踪系统,其特征在于,根据相邻控制点之间设置的节点数指标确定节点序列,具体过程为:
7.一种基于去趋势项的ukf视线跟踪装置,其特征在于,包括:处理器;所述处理器与存储器耦合,所述存储器用于存储计算机程序或指令,所述处理器用于执行存储器中的所述计算机程序或指令,使得权利要求1-3任一项所述的一种基于去趋势项的ukf视线跟踪方法被执行。
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述存储介质所在设备执行如权利要求1至3任一项所述的一种基于去趋势项的ukf视线跟踪方法。
技术总结
本发明公开了一种基于去趋势项的无迹卡尔曼滤波视线跟踪算法,属于自动化制导技术领域。基于无迹卡尔曼滤波的目标视线跟踪问题中,必须满足系统中的噪声是高斯白噪声的要求,而实际噪声数据中一般含有趋势项,不满足这种要求。为此,本发明提出了一种使用Clamped B样条函数去除量测方程噪声的趋势项,从而将无迹卡尔曼滤波视线跟踪系统中量测方程噪声白化的算法。仿真结果表明,基于去趋势项的无迹卡尔曼滤波视线跟踪算法的位置偏差小于1.0m。与直接用无迹卡尔曼滤波算法相比,基于去趋势项的无迹卡尔曼滤波视线跟踪算法在非高斯白噪声系统中的滤波结果鲁棒性更好,并且有着更高的滤波精度。
技术研发人员:张钧,晏小璟,刘小茂
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!