一种基于区域统计的条纹投影轮廓术条纹级数校正方法
本发明属于视觉测量,具体涉及一种基于区域统计的条纹投影轮廓术条纹级数校正方法。
背景技术:
1、条纹投影轮廓术一直是机器视觉研究的热点,广泛应用于医学辅助诊断、工业检测、文物数字化等场景。该方法将双目视觉测量系统中一个相机替换成一个投影仪,主动投射已知分布的编码结构光到被侧对象表面来完成对缺乏纹理信息的单一均匀表面三维测量,并利用特征点来完成相机和投影仪器中对应匹配点的唯一编码。条纹投影轮廓术投影带有多步相移的正弦或者余弦条纹,通过相移法进行解调获取编码条纹的相位值,采用相位的编码方式具有对噪声、光照、投影仪离焦等鲁棒的特点。为了提高测量的精度,条纹投影轮廓术通常采用较高的条纹频率,而解调的相位值受到反正切函数影响相位值截断在(-π,π]区间,也称作包裹相位。对包裹相位进行展开获取像素的绝对相位成为条纹投影轮廓术研究的重点,其核心就是计算任意像素的条纹级数。当前相位展开方法可分为空域法和时间相位展开方法两类,其中时间相位展开方法中的多频法和格雷码辅助方法具有鲁棒性高的特点,得到快速的发展。
2、格雷码结合多频相移技术的条纹投影轮廓术三维轮廓测量具有重建精度高、环境适应性好和测量鲁棒性等特点,已经广泛的应用在工业场景中零部件三维检测中。该方法利用相位编码的鲁棒性以及空间分辨率高的特点来计算像素的包裹相位,格雷码编码方法用于完成包裹相位条纹级数的计算。受系统噪声及系统低通滤波特性影响,相机拍摄的格雷码边沿不是锐利截止,因此需要作二值化操作。从而很难准确确定边沿像素,通常带来额外的判断误差,导致二值化后的格雷码边沿和包裹相位截断处产生错位,使得该区域的像素包裹相位展开错误,产生级次跳变误差。
3、针对上述问题,孙学真等人(孙学真,苏显渝,邹小平,基于互补型光栅编码的相位展开,光学学报,(2008)1947-1951)提出了互补格雷码的编码方法,在编码同样条纹周期的包裹相位时,比传统格雷码多使用一副移动了半个周期的互补格雷码,保证最密的格雷码周期和条纹周期一致。该方法需要额外投影一副图像,同时需要完成两轮的解码操作。吴周杰等人(wu z,guo w,lu l,&zhang q.generalized phase unwrapping method thatavoids jump errors for fringe projection profilometry[j].optics express,2021,29(17):27181-27192.)根据三步相移法的包裹相位的特点,进行分段获取条纹级数,该方法只适合于三步相移法中。
技术实现思路
1、针对格雷码辅助多频相移法包裹相位展开中包裹相位边界与条纹级数边界错位引入的条纹级数错误的问题,本发明提出一种基于区域统计的条纹投影轮廓术条纹级数校正方法。与传统方法不同的是,所提方法不需要额外增加格雷码编码图像的数量和只能应用于三步相移法相位展开的限制,所提方法利用单个条纹周期内两个区间中像素具有独立的条纹级数错误分布规律,从而对单个条纹周期内像素进行分区间处理完成条纹级数的校正。所提方法在完成二维图像数据处理过程中以一行像素为计算单元,因此在硬件的基础上可完成算法的并行计算。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于区域统计的条纹投影轮廓术条纹级数校正方法,包括以下步骤:
4、步骤1:根据格雷码编码原理和相移法原理生成格雷码编码图和具有相位移动的余弦条纹编码图,投影模块进行编码图像投影,相机同步采集经被测对象高度调制后的图像;
5、步骤2:对相机采集余弦条纹编码图进行相位解调得到包裹相位图,对格雷码编码图像进行解码得到包裹相位条纹级数;利用相位解调同时得到的余弦条纹的背景项和幅值项的比值得到任意像素包裹相位的置信度,把置信度值小于设定阈值的像素定义为无效像素;
6、步骤3:对包裹相位图中像素相位值小于0和大于等于0的像素标识,生成2副二值化掩模图像,同时消除背景像素,掩模图像分别表示为m1和m2,其中有效像素的值为1,无效像素的值为0;
7、步骤4:对掩模图像m2区域内的有效像素,从左向右遍历一段连续像素序列,当区间内像素对应条纹级数有两种数值时,该段区域内所有像素取较小的级数值,遍历完所有有效像素后得到新的条纹级数图s2;对掩模图像m1区域内的有效像素,从右向左遍历一段连续像素序列,当区间内像素对应条纹级数有两种数值时,该段区间内所有像素去较大的级数值,遍历完所有有效像素后得到新的条纹级数图s1;
8、步骤5:对新计算得到的条纹级数图s1和s2合并得到条纹级数图s0,同时完成对包裹相位的展开得到绝对相位图;
9、步骤7:采用双目立体匹配技术完成对左右相机对应的绝对相位图的同名点匹配,并根据投影仪和相机标定参数得到被测对象的三维形貌。
10、本发明进一步的改进在于,步骤1)的具体实现方法如下:
11、步骤1.1:搭建由双目相机和投影仪组成的双目结构光系统,并对双目结构光系统进行标定;
12、步骤1.2:生成带有相位移动的余弦条纹编码图,其表达式如下:
13、
14、其中,a(x,y)表示条纹背景项,b(x,y)表示余弦条纹幅值项,φ(x,y)表示绝对相位,δi=2πi/n为已知相移量,i∈1,2,…,n,n表示相移步数;
15、步骤1.3:生成格雷码编码图像gi,格雷码编码图的编码周期与余弦条纹编码图具有相同的周期数目,对编码图像进行投影,相机同步获取经过被测对象高度调制后的图像。
16、本发明进一步的改进在于,步骤2)的具体实现方法如下:
17、步骤2.1:采用相移法原理完成对每个像素相位值的解调:
18、
19、
20、其中表示任意像素的背景项,表示任意像素的幅值项,表示解算得到的包裹相位;因为反正切求解使得相位解调得到的像素相位值值域为(-π,π],为了获取任意像素的绝对相位φ(x,y),采用格雷码编码解算得到包裹相位级次数值;
21、步骤2.2:对任意像素的格雷码编码图的灰度值进行归一化处理,归一化的图像表示为利用像素灰度值全为255和全为0的格雷码编码图对应的相机采集图像计算相机采集图像的二值化阈值ε0,并根据该阈值完成格雷码图像二值化处理,生成二值化图像序列gi,二值化数学定义如下:
22、
23、根据二值化图像序列gi,并利用格雷码解码算法计算得到条纹级数图v;
24、步骤2.3:利用任意像素相位解调得到的背景项和幅值项的比值来描述包裹相位的置信度,并定义置信度小于阈值ε1的像素的为无效像素,并用二值化掩模来标识:
25、
26、本发明进一步的改进在于,步骤3)的具体实现方法如下:
27、包裹相位图中任意像素的值域为(-π,π],利用值域对像素分类,并用两幅二值化掩模图像m1和m2记录两类像素的位置,两幅掩模图像值正好相反:
28、
29、
30、获得的两幅掩模图像分别与掩模图像m0相乘,进一步剔除包裹相位置信度低的无效像素。
31、本发明进一步的改进在于,步骤4)的具体实现方法如下:
32、步骤4.1:以图像中的行为计算单元;采用掩模图像m2来标识连续可靠像素位置,行方向上m2(x,y)=1的一段连续像素定义为一段有效像素区域;
33、步骤4.2:依据条纹级数图v统计有效一段有效像素区域内像素的条纹级数值的种类;当只有一种级数值时不改变该区域内像素级数值;当有两种条纹级数值时,对该段区域内的所有像素的条纹级数值设置为较小的值;以上得到含有条纹图一半像素的条纹级数图s2;
34、步骤4.3:采用掩模图像m1来标识连续可靠像素位置,行方向上m1(x,y)的一段连续像素定义为一段有效像素区域,统计该区域内所有像素条纹级数值的种类;当有两种条纹级数值时,对该段区域内的所有像素的条纹级数值设置为较大的值;以上得到含有条纹图一半像素的条纹级数图s1。
35、本发明进一步的改进在于,步骤5)的具体实现方法如下:
36、步骤5.1:合并两个条纹级数图s1和s2得到图像所有像素条纹级数图s;
37、步骤5.2:利用条纹级数图s和包裹相位图得到展开后的绝对相位图φ;相位展开的数学定义描述为
38、本发明进一步的改进在于,步骤6)的具体实现方法如下:
39、采用步骤2到步骤5的方法,分别处理左右相机拍摄到经被测对象调制后的格雷码编码图和余弦条纹编码图,处理完后分别得到左右相机对应的绝对相位图φ1和φ2。
40、本发明进一步的改进在于,在双目结构光系统中,被测对象的统一位置在左右相机成像像素具有相同且唯一的像素值;利用双目视觉立体匹配的原理以相位作为同名点的描述来计算左右相机同名像素点,满足|φ1(x-d,y)-φ2(x,y)|≤ε1;其中d表示同名点因视角变化在左右相机中成像的图像坐标的移动,立体视觉中称作像素点(x,y)的视差值;
41、利用双目系统参数把视差图转化为相机坐标系下的深度图:
42、
43、其中f为相机焦距,b表示双目相机基线距离,像素点p为图像任意像素点,其视差值为dp,对应相机坐标系下的三位坐标为(xp,yp,zp)。
44、本发明至少具有如下有益的技术效果:
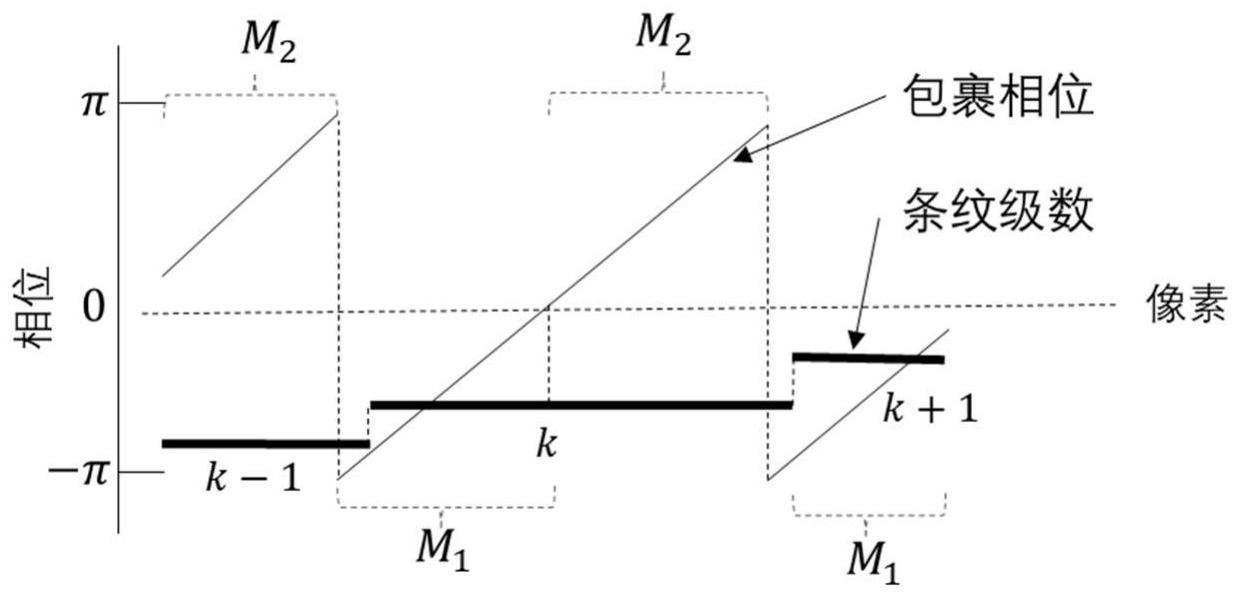
45、本发明提出了一种基于区域统计的条纹投影轮廓术条纹级数校正方法,该方法能够在cpu和gpu硬件中并行的完成条纹级数误差校正计算过程。该算法首先通过多步相移法计算包裹相位以及通过格雷码方法来计算条纹级数。然后基于包裹相位值一个条纹周期分成两个区间,(包裹相位值小于0的像素和包裹相位值大于等于0的像素)。以行为计算单元对两个区间内的连续像素进行统计,对于包裹相位大于等于0的区间内像素的条纹级数取该区间较小的条纹级数值,对于包裹相位小于0的区间内的像素取该区间较大的条纹级数值。最后对两个区间的条纹级数校正结果进行合并得到整个条纹周期内像素的条纹级数值。
- 还没有人留言评论。精彩留言会获得点赞!