一种基于无人机的雷达自动标校方法及装置与流程
本发明涉及雷达标校,尤其涉及一种基于无人机的雷达自动标校方法及装置。
背景技术:
1、现代化近程防御武器系统是多传感器融合的武器系统,通过对各传感器探测的目标信息解算射击诸元,指挥高炮或导弹有效拦截、攻击目标。雷达作为武器系统的重要传感器,其主要任务就是获取目标的距离、方位、高度等参数信息。雷达探测目标精度直接关系到火控解算精度,同时也是保证武器系统毁伤效率的重要前提。在武器系统的研制、定型、生产、部队试用及后期保养维护过程中,均需要对雷达的测距、测角性能进行验证和标定,以消除由于火炮射击冲击、战车平台行军振动、元器件老化、战车平台变形等因素造成的零位偏差。
2、雷达对目标的测量误差包含随机误差和系统误差两部分。随机误差又称为不确定误差,对于雷达而言,指测量过程中由雷达接收机热噪声、杂波干扰等随机波动的因素相互抵偿而形成的误差,随机误差数学期望为零。系统误差是指多次对同一被测量进行测量,测量结果均值与真实值之差,系统误差的数学期望不为零。随机误差可通过平滑、滤波等数据处理手段予以消除,而系统误差则必须通过数值修正予以降低,修正后的误差大小取决于修正的数学模型和修正值的准确程度。
3、雷达系统误差的修正值可通过雷达标校来获得,修正值越精确,则修正效果越好。雷达的标校包括标定和校准两部分,标定是指通过某种方法给出系统误差修正值的过程,校准是指采取某种措施减小或消除系统误差的过程。由于实际工作中,标定和校准通常一起进行,因而简称雷达标校。通过雷达标校可以达到减小甚至消除系统误差,从而提高雷达系统测量精度的目的。
4、目前雷达标校方法主要有常规标校(标校塔标校、信标球标校等方法)、星体标校、卫星标校和gps标校等。
5、然而,传统标校塔进行雷达标校存在以下不足:1)需要建设标校塔,靶场保障建设难度大;2)自动化水平较低;3)标校时间较长,影响任务效率。
6、信标球标校,存在如下问题:1)雷达难以对信标球进行稳定跟踪与标校;2)标校精度有限;3)标校成本高。
7、星体标校主要应用于雷达静止技术状态,无法满足动态技术状态的标校要求。
8、卫星标校主要用于舰载雷达,此方法虽可动态进行,但受卫星时间和距离的影响很大,同时船姿态误差也严重影响标校结果,计算复杂。
9、gps标校方法采用无人机加装差分gps设备作为跟踪目标并提供真值数据,通过离线处理计算雷达系统误差修正参数,具有较高的标校精度,但实时性较差。
10、因此,研制出一种可解决上述问题,改善现有雷达标校方式的不足,提高雷达标校精度和效率的新的标校方法,是一个亟需解决的问题。
技术实现思路
1、本发明要解决的技术问题是,如何采用带有高精度定位系统的无人机对雷达系统进行标校,能够对雷达系统误差进行实时计算与显示;有鉴于此,本发明提供一种基于无人机的雷达自动标校方法及装置。
2、本发明采用的技术方案是,一种基于无人机的雷达自动标校方法,包括:
3、步骤s1,将无人机置于雷达平台,利用无人机实时定位功能获取基于地心大地坐标系下的雷达坐标;
4、步骤s2,待无人机起飞至标定位时,雷达对无人机进行探测、跟踪,跟踪结果以预设的更新率通过网口传输到地面站计算机;同时无人机位姿数据通过数传链路实时下传至地面站计算机,作为目标真值;
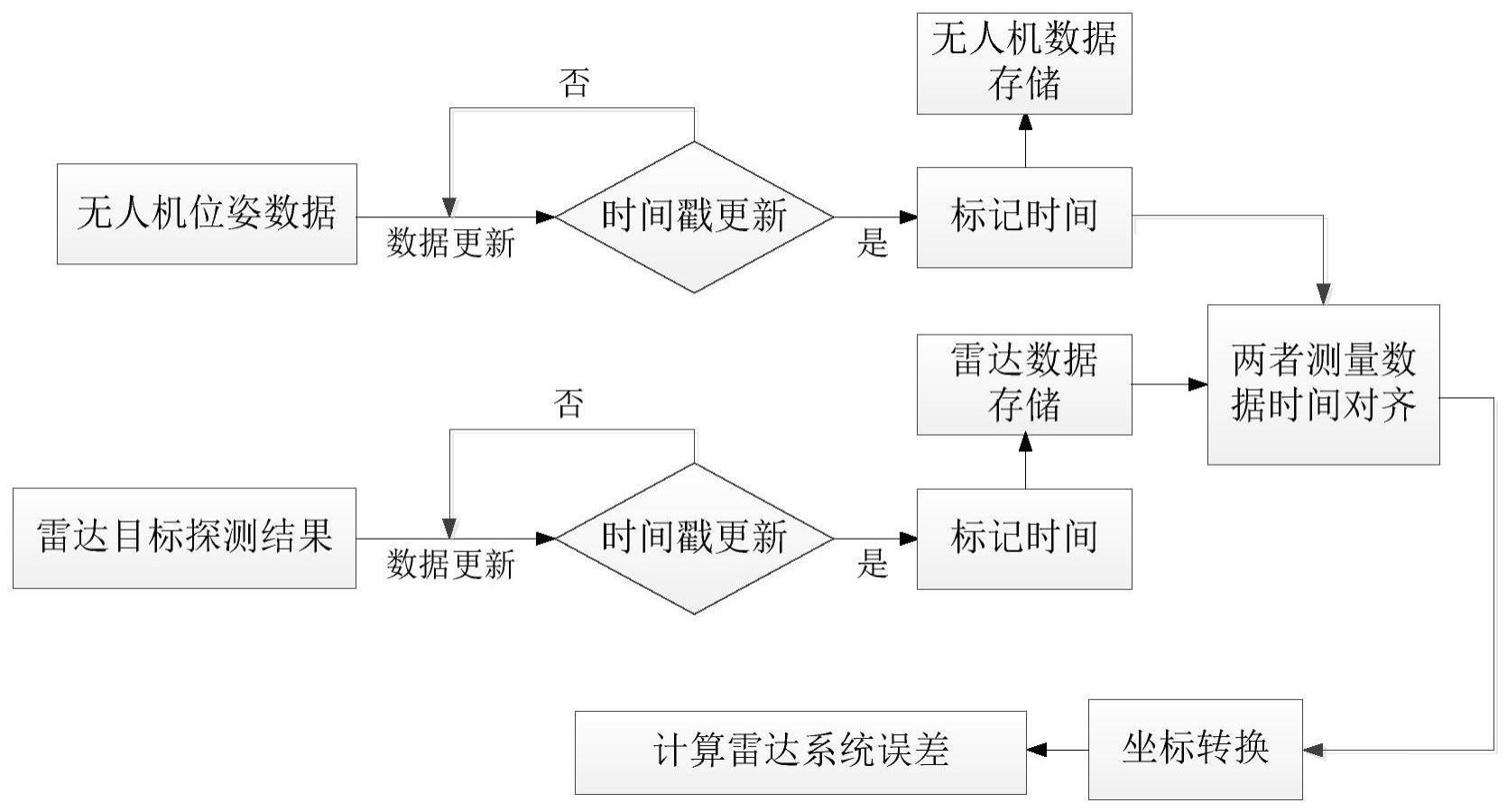
5、步骤s3,当地面站计算机接收到无人机回传的位姿数据时,在存储空间中找寻与当前时间点最接近的雷达跟踪数据;
6、步骤s4,通过坐标转换,实现所述雷达目标跟踪结果和所述无人机位姿数据两者的坐标统一;
7、步骤s5,利用所述雷达目标跟踪结果和所述无人机位姿数据,确定雷达系统测距、测角误差;
8、步骤s6,对雷达系统误差进行修正。
9、在一个实施方式中,所述雷达对无人机目标的跟踪结果为帧同步的更新频率。
10、在一个实施方式中,利用所述雷达目标跟踪结果和所述无人机位姿数据,确定雷达系统误差,包括:
11、对所述雷达目标跟踪结果和所述无人机位姿数据进行坐标转换,以实现两者测量数据的坐标统一;
12、在统一的坐标系中,以所述无人机位姿数据作为真值,计算雷达系统测距、测角误差。
13、在一个实施方式中,对所述雷达目标跟踪结果和所述无人机位姿数据进行坐标转换,以实现两者测量数据的坐标统一,包括:
14、将以地心大地坐标表示的所述无人机位姿数据转化为以地心空间直角坐标系表示;
15、将所述无人机位姿数据转化为法线站心直角坐标表示;
16、将所述无人机位姿数据转化为法线站心极坐标表示。
17、在一个实施方式中,对所述雷达系统误差进行修正,包括:
18、通过改变无人机相对于雷达的距离、角度和运动状态,对所述无人机位姿数据以及雷达目标跟踪结果进行多次多时测量,获取雷达的统计误差。
19、在一个实施方式中,所述统计误差,包括:距离、方位、俯仰测量误差。
20、在一个实施方式中,所述无人机采用rtk差分技术,实时确定所述无人机精确的位姿数据。
21、本发明的另一方面还提供了一种基于无人机的雷达自动标校装置,包括:
22、第一获取单元,被配置为以无人机定位设备获取基于地心大地坐标系下的雷达坐标;
23、第二获取单元,被配置为待无人机起飞至标定位时,地面站计算机以预设的更新率获取雷达对无人机目标的跟踪结果;
24、第三获取单元,被配置为地面站计算机以预设的更新率获取无人机位姿数据;
25、对齐单元,被配置为确定与获取的所述无人机位姿数据,时间点最接近的雷达跟踪数据;
26、转换单元,被配置为实现所述雷达目标跟踪结果和所述无人机位姿数据的坐标统一;
27、确定单元,被配置为利用所述雷达目标跟踪结果和所述无人机位姿数据,确定雷达系统误差;
28、修正单元,被配置为对所述雷达系统误差进行修正。
29、本发明的另一方面还提供了一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一项所述的基于无人机的雷达自动标校方法的步骤。
30、本发明的另一方面还提供了一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的基于无人机的雷达自动标校方法的步骤。
31、本发明提出了一种基于无人机的雷达自动标校方法,采用带有高精度定位系统的无人机对雷达系统进行标校,能够对雷达系统误差进行实时计算与显示。并且,本发明实施例可通过软件形式与雷达系统建立连接,因此对应用平台不作限制,具有普适性。
技术特征:
1.一种基于无人机的雷达自动标校方法,其特征在于,包括:
2.根据权利要求1所述的基于无人机的雷达自动标校方法,其特征在于,所述雷达对无人机目标的跟踪结果为帧同步的更新频率。
3.根据权利要求1所述的基于无人机的雷达自动标校方法,其特征在于,通过坐标转换,实现所述雷达目标跟踪结果和所述无人机位姿数据两者的坐标统一,包括:
4.根据权利要求1所述的基于无人机的雷达自动标校方法,其特征在于,对所述雷达系统误差进行修正,包括:
5.根据权利要求4所述的基于无人机的雷达自动标校方法,其特征在于,所述统计误差,包括:距离、方位、俯仰测量误差。
6.根据权利要求1所述的基于无人机的雷达自动标校方法,其特征在于,所述无人机采用rtk差分技术,实时确定所述无人机精确的位姿数据。
7.一种基于无人机的雷达自动标校装置,其特征在于,包括:
8.一种电子设备,其特征在于,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至6中任一项所述的基于无人机的雷达自动标校方法的步骤。
9.一种计算机存储介质,其特征在于,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的基于无人机的雷达自动标校方法的步骤。
技术总结
本发明提出了一种基于无人机的雷达自动标校方法及装置,方法包括:将无人机置于雷达平台,利用无人机实时定位功能获取基于地心大地坐标系下的雷达坐标;待无人机起飞至标定位时,雷达对无人机进行跟踪,跟踪结果以预设的更新率通过网口传输到地面站;同时无人机位姿数据通过数传链路实时下传至地面站计算机;当地面站接收到无人机回传的位姿数据时,在存储空间中找寻与当前时间点最接近的雷达跟踪数据;通过坐标转换,实现两者测量数据的坐标统一;以无人机数据作为真值,确定雷达系统测距、测角误差;以此对雷达系统误差进行修正。本发明采用带有高精度定位系统的无人机对雷达系统进行标校,能够对雷达系统误差进行实时计算。
技术研发人员:翟颖
受保护的技术使用者:中国电子科技集团公司第二十研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!