一种色带导航方法、装置及自动运输装置与流程
本申请涉及自动化运输装置的导航,具体涉及一种色带导航方法、装置及自动运输装置。
背景技术:
1、随着自动化技术和机器视觉技术的蓬勃发展,为了降低人力劳动成本,越来越多的工厂车间、仓库等地使用自动导引车搬运货物、装货、卸货等作业,自动导引车在当代柔性生产线、装配线和仓储物流自动化行业系统中起到越来越重要的搬运作用。
2、自动导引车(automated guided vehicle,简称agv),通常也称为agv小车。是指配备有自动导引视别装置的移动式运输小车,以控制器为运动控制核心,以电池或电容作为动力能源,它能在上位机(调度系统)的调度下,按预先规划好的路径安全精确行驶,并在相应工位根据指令进行作业任务如自动充电、取货、送货等。
3、目前自动导引车大部分采用磁导航、激光导航、双摄像头色带导航等巡线导航技术,这些方法都无法确认智能搬运车的行进路线是否偏离设定路线。色带导航作为精准定位的导航方式,得到广泛应用,但是目前色带导航的应用都是基于循迹模式,即agv沿着色带轨道铺设方向行驶,控制系统根据agv偏离色带轨道铺设的偏移量修正agv的位置,该方法只能控制agv按照预设色带轨道行驶,却不能输出agv的全局位置和姿态信息,即无法对agv进行全局定位。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种色带导航方法、装置及自动运输装置,解决了上述技术问题。
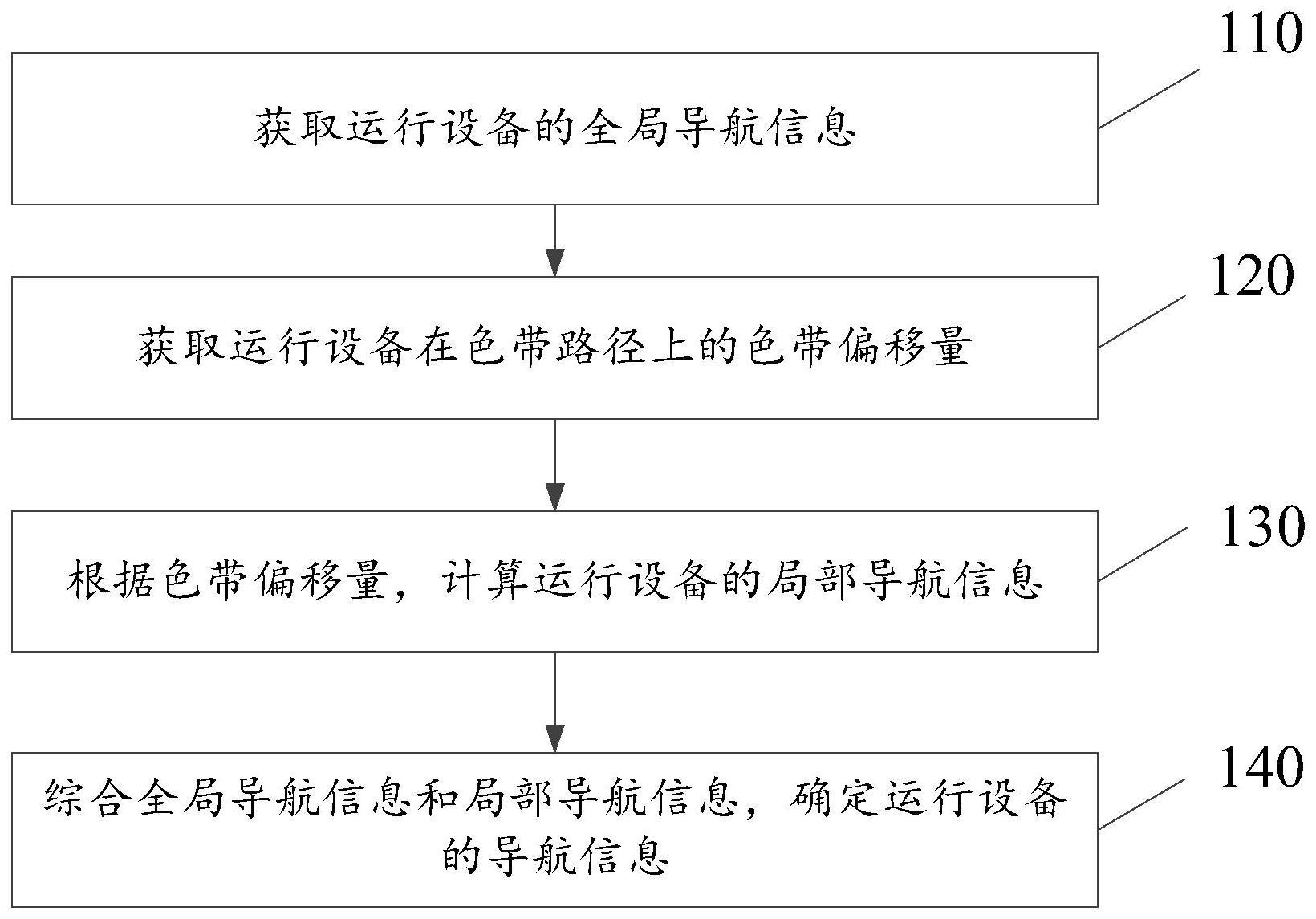
2、根据本申请的一个方面,提供了一种色带导航方法,包括:获取所述运行设备的全局导航信息;其中,所述全局导航信息表征所述运行设备在全局导航地图中的位置信息和位姿信息;获取运行设备在色带路径上的色带偏移量;其中,所述色带路径上设置有标识色带,所述色带偏移量由所述运行设备上的色带传感器识别所述标识色带得到;根据所述色带偏移量,计算所述运行设备的局部导航信息;其中,所述局部导航信息表征所述运行设备在局部导航地图中的位置信息和位姿信息;以及综合所述全局导航信息和所述局部导航信息,确定所述运行设备的导航信息。
3、在一实施例中,所述标识色带包括平行于所述色带路径的延伸方向的一字色带,所述一字色带设置于所述色带路径的整个延伸路径上;其中,所述获取运行设备在色带路径上的色带偏移量包括:获取所述运行设备相对所述一字色带的色带偏移量。
4、在一实施例中,所述标识色带包括平行和垂直于所述色带路径的延伸方向的十字色带,所述十字色带设置于所述色带路径的停车点;其中,所述获取运行设备在色带路径上的色带偏移量包括:获取所述运行设备相对所述十字色带的色带偏移量。
5、在一实施例中,所述色带路径上预设位置上设置有一维码标识;其中,在所述根据所述色带偏移量,计算所述运行设备的局部导航信息之前,所述色带导航方法还包括:识别所述一维码标识;所述根据所述色带偏移量,计算所述运行设备的局部导航信息包括:根据所述色带偏移量和所述一维码标识对应的位置信息,计算所述运行设备的局部导航信息。
6、在一实施例中,所述根据所述色带偏移量,计算所述运行设备的局部导航信息包括:根据所述标识色带的位置信息,计算所述运行设备在所述局部导航地图中的位置信息;以及根据所述色带偏移量,计算所述运行设备在所述局部导航地图中的位姿信息。
7、在一实施例中,所述综合所述全局导航信息和所述局部导航信息,确定所述运行设备的导航信息包括:根据所述局部导航信息修正所述全局导航信息,以得到所述运行设备的导航信息。
8、在一实施例中,所述运行设备包括四个所述色带传感器,四个所述色带传感器分布于所述运行设备对称的四个位置;其中,所述获取运行设备在色带路径上的色带偏移量包括:采用四个所述色带传感器分别获取对应的单一色带偏移量;以及根据四个所述单一色带偏移量,计算得到所述运行设备在所述色带路径上的所述色带偏移量。
9、在一实施例中,四个所述色带传感器分布于所述运行设备的左侧、右侧、前侧和后侧;其中,所述根据四个所述单一色带偏移量,计算得到所述运行设备在所述色带路径上的所述色带偏移量包括:根据前侧和后侧的所述色带传感器获取的所述单一色带偏移量,计算所述运行设备在所述色带路径的延伸方向上的色带偏移量;以及根据左侧和右侧的所述色带传感器获取的所述单一色带偏移量,计算所述运行设备在所述色带路径的延伸方向的垂直方向上的色带偏移量。
10、根据本申请的另一个方面,提供了一种色带导航装置,包括:全局获取模块,用于获取所述运行设备的全局导航信息;其中,所述全局导航信息表征所述运行设备在全局导航地图中的位置信息和位姿信息;偏移获取模块,用于获取运行设备在色带路径上的色带偏移量;其中,所述色带路径上设置有标识色带,所述色带偏移量由所述运行设备上的色带传感器识别所述标识色带得到;局部获取模块,用于根据所述色带偏移量,计算所述运行设备的局部导航信息;其中,所述局部导航信息表征所述运行设备在局部导航地图中的位置信息和位姿信息;以及导航执行模块,用于综合所述全局导航信息和所述局部导航信息,确定所述运行设备的导航信息。
11、根据本申请的另一个方面,提供了一种自动运输装置,包括:运行设备;以及如上述的色带导航装置,其中,所述色带导航装置设置于所述运行设备上。
12、本申请提供的一种色带导航方法、装置及自动运输装置,通过获取运行设备的全局导航信息,其中全局导航信息表征运行设备在全局导航地图中的位置信息和位姿信息;获取运行设备在色带路径上的色带偏移量,其中色带路径上设置有标识色带,色带偏移量由运行设备上的色带传感器识别标识色带得到;根据色带偏移量,计算运行设备的局部导航信息,其中局部导航信息表征运行设备在局部导航地图中的位置信息和位姿信息;以及综合全局导航信息和局部导航信息,确定运行设备的导航信息;即通过获取运行设备的全局导航信息和运行设备在色带路径上的色带偏移量,根据色带偏移量计算得到运行设备的局部导航信息,最后结合局部导航信息和全局导航信息确定运行设备的最终导航信息,不仅可以有效提高运行设备的导航准确性,以保证其在全局导航信息不准确的位置修正导航信息,还可以结合全局导航信息和局部导航信息获知运行设备的全局位置和姿态信息,以实现运行设备的全局定位。
技术特征:
1.一种色带导航方法,其特征在于,包括:
2.根据权利要求1所述的色带导航方法,其特征在于,所述标识色带包括平行于所述色带路径的延伸方向的一字色带,所述一字色带设置于所述色带路径的整个延伸路径上;其中,所述获取运行设备在色带路径上的色带偏移量包括:
3.根据权利要求1所述的色带导航方法,其特征在于,所述标识色带包括平行和垂直于所述色带路径的延伸方向的十字色带,所述十字色带设置于所述色带路径的停车点;其中,所述获取运行设备在色带路径上的色带偏移量包括:
4.根据权利要求1所述的色带导航方法,其特征在于,所述色带路径上预设位置上设置有一维码标识;其中,在所述根据所述色带偏移量,计算所述运行设备的局部导航信息之前,所述色带导航方法还包括:
5.根据权利要求1-4中任一项所述的色带导航方法,其特征在于,所述根据所述色带偏移量,计算所述运行设备的局部导航信息包括:
6.根据权利要求1-4中任一项所述的色带导航方法,其特征在于,所述综合所述全局导航信息和所述局部导航信息,确定所述运行设备的导航信息包括:
7.根据权利要求1-4中任一项所述的色带导航方法,其特征在于,所述运行设备包括四个所述色带传感器,四个所述色带传感器分布于所述运行设备对称的四个位置;其中,所述获取运行设备在色带路径上的色带偏移量包括:
8.根据权利要求7所述的色带导航方法,其特征在于,四个所述色带传感器分布于所述运行设备的左侧、右侧、前侧和后侧;其中,所述根据四个所述单一色带偏移量,计算得到所述运行设备在所述色带路径上的所述色带偏移量包括:
9.一种色带导航装置,其特征在于,包括:
10.一种自动运输装置,其特征在于,包括:
技术总结
本申请公开了一种色带导航方法、装置及自动运输装置,通过获取运行设备的全局导航信息;获取运行设备在色带路径上的色带偏移量,色带偏移量由运行设备上的色带传感器识别标识色带得到;根据色带偏移量,计算运行设备的局部导航信息;以及综合全局导航信息和局部导航信息,确定运行设备的导航信息;即通过获取运行设备的全局导航信息和局部导航信息,最后结合局部导航信息和全局导航信息确定运行设备的最终导航信息,不仅可以有效提高运行设备的导航准确性,以保证其在全局导航信息不准确的位置修正导航信息,还可以结合全局导航信息和局部导航信息获知运行设备的全局位置和姿态信息,以实现运行设备的全局定位。
技术研发人员:程子健,马天添,崔华坤
受保护的技术使用者:三一机器人科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!