一种基于马尔科夫估计的重力梯度解耦方法与流程
本发明属于重力梯度仪测量精度,涉及一种基于旋转加速度计原理的重力梯度仪同轴分量解耦方法,尤其是一种基于马尔科夫估计的重力梯度解耦方法。
背景技术:
1、重力梯度是重力矢量的空间变化率,在矿产资源勘探、地球科学研究以及惯性导航等方面具有重要意义。重力梯度仪是用于测量重力梯度的精密设备,基于bellaerospace公司提出的旋转加速度计测量原理的重力梯度仪是迄今唯一实用的近地表动态重力梯度仪。
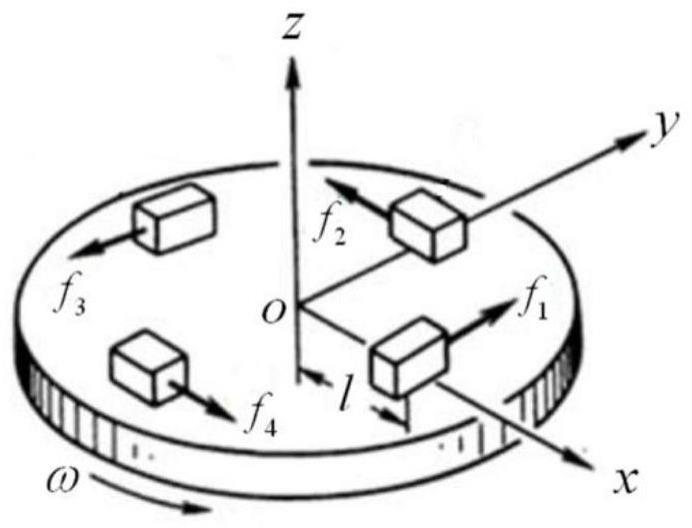
2、如图1所示,作为核心敏感器的重力梯度测量组件基于加速度计位置差分测量原理,通过机械旋转的方式将重力梯度张量分量调制到系统旋转频率的二倍频处,重力梯度敏感器输出与重力梯度张量分量之间的关系可表示为:
3、(a1+a3)-(a2+a4)=4r(γuvsin2ωt+γxycos2ωt)
4、 (1)
5、式中a1、a2、a3和a4是四只加速度计的测量输出信号,r是加速度计检测质心到旋转中心的距离,γuv和γxy是对应方向上重力梯度张量分量,其中ω是旋转机构的旋转角速度。将敏感器输出的加速度计组合信号进行2ω频率上的同步解调得到最终的重力梯度张量信号γuv和γxy。
6、在全张量重力梯度测量中,三只重力梯度敏感器的旋转轴在空间中正交布设,由三只敏感器的旋转轴构建右手坐标系,成为测量坐标系。此时三只敏感器能够实时测量该坐标系下的γuv与γxy、γvw与γyz和γnw与γxz分量(其中)。由此可以得到测量坐标系下重力梯度全部交叉分量γxy、γyz和γxz,但重力梯度同轴分量γyz、γyy和γzz仍需进一步解耦,以实现全张量重力梯度测量。
7、现有解耦方法没有充分考虑三只敏感器测量能力的不同,孤立的认为三只敏感器测量能力相当,降低重力梯度仪信号的解耦精度。
8、经检索,未发现与本发明相同或相似的现有技术的专利文献。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种基于马尔科夫估计的重力梯度解耦方法,能够在重力梯度解耦过程中充分考虑各个敏感器测量能力的不同,进而实现更高精度的重力梯度同轴分量解耦。
2、本发明解决其现实问题是采取以下技术方案实现的:
3、一种基于马尔科夫估计的重力梯度解耦方法,包括以下步骤:
4、步骤1、三只重力梯度敏感器实时获取测量坐标系下的原始输出信号:
5、步骤2、基于步骤1所采集的三只重力梯度敏感器实时获取测量坐标系下的原始输出信号的数值,结合拉普拉斯方程,建立重力梯度同轴分量的量测方程,再通过马尔科夫估计完成同轴分量的解耦。
6、而且,所述步骤1的具体方法为:
7、三只重力梯度敏感器可以实时获取测量坐标系下的γuv、γvw、γuw、γyz、γxz和γxy信号,其中交叉分量γxy、γyz和γxz可直接通过解调所得,而同轴分量γxx、γyy和γzz的解耦则需要结合拉普拉斯方程,通过马尔可夫估计方法获得。
8、而且,所述步骤2的具体步骤包括:
9、(1)建立实时采集三只重力梯度敏感器的输出与拉普拉斯方程结合的重力梯度同轴分量的量测方程:
10、z=hx+v (1)
11、式中,z:同步输出的三只重力梯度敏感器的输出与拉普拉斯方程结合的观测向量,其标量形式为z=[γvw γuw γuv 0]t;
12、h:4×3阶状态变量的系数矩阵,其标量形式为
13、
14、x:待估计的状态变量,其标量形式为x=[γxx γyy γzz]t;
15、v:3维干扰噪声向量。
16、(2)为保证观测估计之间的加权误差平方和最小,通过马尔科夫估计完成同轴分量的解耦,其估计结果为:
17、
18、式中,为状态变量的估计值,r为量测信息的误差矩阵,其标量形式为r=diag(r1 r2 r3 r4);其中r1、r2和r3分别为对应编号重力梯度敏感器输出信号的误差方差值,r4是拉普拉斯方程的误差方差,由于该式为理论公式,默认r4=(0.01e)2。
19、本发明的优点和有益效果:
20、本发明提出一种基于马尔科夫估计的重力梯度解耦方法,基于旋转加速度计原理的全张量重力梯度仪开展全张量重力梯度测量时,需要在三只重力梯度敏感器实时输出的γuv、γvw和γuw分量解耦,本发明能够在重力梯度解耦的过程中充分考虑不同敏感器测量噪声不同的影响,通过将三只敏感器测量分量结合拉普拉斯方程,建立线性回归方程,同时将三只敏感器测量噪声构建方差阵,利用马尔科夫估计的方法实现重力梯度同轴分量解耦。本发明在充分考虑各只敏感器测量能力不同的前提下实现最优解耦,通过本发明的解耦方法获得更低噪声的重力梯度同轴分量,进而提高重力梯度测量精度。
技术特征:
1.一种基于马尔科夫估计的重力梯度解耦方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于马尔科夫估计的重力梯度解耦方法,其特征在于:所述步骤1的具体方法为:
3.根据权利要求1所述的一种基于马尔科夫估计的重力梯度解耦方法,其特征在于:所述步骤2的具体步骤包括:
技术总结
本发明涉及一种基于马尔科夫估计的重力梯度解耦方法,包括以下步骤:步骤1、三只重力梯度敏感器实时获取测量坐标系下的原始输出信号:步骤2、基于步骤1所采集的三只重力梯度敏感器实时获取测量坐标系下的原始输出信号的数值,结合拉普拉斯方程,建立重力梯度同轴分量的量测方程,再通过马尔科夫估计完成同轴分量的解耦。本发明能够在重力梯度解耦过程中充分考虑各个敏感器测量能力的不同,进而实现更高精度的重力梯度同轴分量解耦。
技术研发人员:李达,侯巍,张宇飞,李城锁,陈佳,张振
受保护的技术使用者:中国船舶集团有限公司第七〇七研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!