基于光子灯笼的光纤陀螺精度分析方法及系统与流程
本发明涉及惯性导航领域,尤其涉及一种基于光子灯笼的光纤陀螺精度分析方法及系统。
背景技术:
1、随着光纤陀螺技术的进步以及应用逐渐推广,高精度光纤陀螺的应用需求日益迫切,尤其是在一些长航时高精度水面、水下等船用应用场合,要求光纤陀螺精度高,需要连续导航工作,对长航时工作状态下的惯性导航系统提出了越来越迫切的需求。
2、其中,引用一篇专利号为cn115638807b,名称为一种基于地球自转的光纤陀螺精度测试方法,包括如下流程:以地球自转数据作为输入,且测试时间至少半年,分别采集陀螺输出角速度数据并求取平均值,计算出北向夹角;将高精度分度表转动至北向位置,测量输出角速度数据,将输出角速度数据与地球自转输入数据比较,若输出角速度数据包含地球自转输入数据的极值,则判断超高精度光纤陀螺精度优于地球自转速度及地轴章动变化精度。本发明提供的方法利用地球公转作为输入,能够测试出超高精度光纤陀螺的精度级别。
3、同时,引用一篇专利号为cn113074710a,名称为一种光纤陀螺优化精测精度的闭环检测方法,包括如下步骤:步骤一、建立基于四态调制的光纤陀螺系统的数学模型;步骤二、建立和分析主闭环数学模型;步骤三、引入线性反馈控制器,建立系统动力学模型;步骤四、设计优化光纤陀螺性能的控制器的反馈增益矩阵kc,以提高光纤陀螺的检测精度采用本发明的方法可以提高光纤陀螺的精测精度,此方法不仅可以在工程应用中优化检测精度,而且对光纤陀螺的设计也有一定的参考价值。
4、但是,在现有技术中,提高光纤陀螺精度需要增加绕制光纤的长度和环圈的直径,对于光纤陀螺而言,增加传感光纤环长度能够累积角速度产生的非互易相位差,从而进一步提高陀螺的灵敏度和精度。随着光纤长度的增加,不仅意味着更大的体积、成本和绕制难度,还会导致对温度等环境因素的适应性大大降低,限制了陀螺的应用场景,如何在保证在光纤长度一定时增加传播光程,以进一步提升对光纤陀螺进行精度分析时的准确率,成为亟待解决的问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种基于光子灯笼的光纤陀螺精度分析方法及系统,解决了对光纤陀螺进行精度分析时的准确率较低的技术问题。
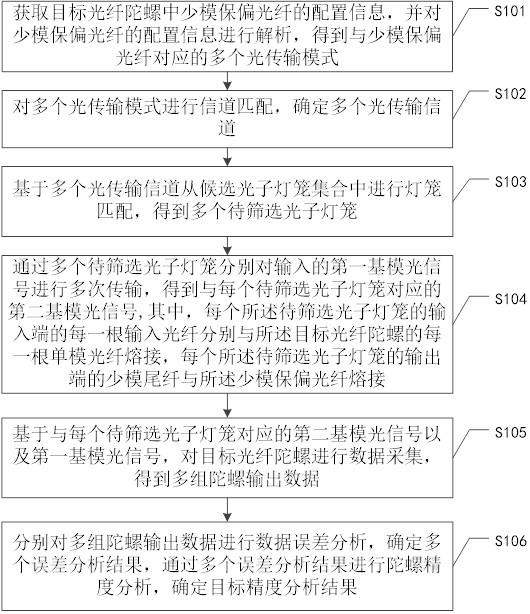
2、本发明提供了一种基于光子灯笼的光纤陀螺精度分析方法,包括:获取目标光纤陀螺中少模保偏光纤的配置信息,并对所述少模保偏光纤的配置信息进行解析,得到与所述少模保偏光纤对应的多个光传输模式;对所述多个光传输模式进行信道匹配,确定多个光传输信道;基于所述多个光传输信道从候选光子灯笼集合中进行灯笼匹配,得到多个待筛选光子灯笼;通过多个所述待筛选光子灯笼分别对输入的第一基模光信号进行多次传输,得到与每个所述待筛选光子灯笼对应的第二基模光信号,其中,每个所述待筛选光子灯笼的输入端的每一根输入光纤分别与所述目标光纤陀螺的每一根单模光纤熔接,每个所述待筛选光子灯笼的输出端的少模尾纤与所述少模保偏光纤熔接;基于与每个所述待筛选光子灯笼对应的第二基模光信号以及所述第一基模光信号,对所述目标光纤陀螺进行数据采集,得到多组陀螺输出数据;分别对多组所述陀螺输出数据进行数据误差分析,确定多个误差分析结果,通过所述多个误差分析结果进行陀螺精度分析,确定目标精度分析结果。
3、在本发明中,所述步骤s101,包括:获取所述目标光纤陀螺中所述少模保偏光纤的配置信息;对所述少模保偏光纤的配置信息进行字段分析,得到对应的多个关键词字段;通过所述多个关键词字段进行传输模式匹配,得到与所述少模保偏光纤对应的多个光传输模式。
4、在本发明中,所述步骤s102,包括:对所述多个光传输模式进行传输类型分析,确定与每一所述光传输模式对应的传输类型;通过与每一所述光传输模式对应的传输类型对所述多个光传输模式进行信道匹配,确定多个光传输信道。
5、在本发明中,所述步骤s103,包括:对所述候选光子灯笼集合中每一候选光子灯笼进行信息遍历处理,得到每一候选光子灯笼对应的传输信道数量;对所述多个光传输信道进行信道数量分析,确定目标信道数量;对所述目标信道数量进行数量区间划分,得到信道数量区间;通过所述信道数量区间以及每一候选光子灯笼对应的传输信道数量,对所述候选光子灯笼集合进行灯笼匹配,得到多个待筛选光子灯笼。
6、在本发明中,所述步骤s104,包括:对每个所述待筛选光子灯笼进行信道遍历,确定每个所述待筛选光子灯笼对应的多个待传输光传输信道;对每个所述待筛选光子灯笼对应的多个待传输光传输信道进行传输顺序分析,确定每个所述待筛选光子灯笼对应的信道传输顺序;基于每个所述待筛选光子灯笼对应的信道传输顺序,分别对所述第一基模光信号进行多次传输,得到每个所述待筛选光子灯笼对应的第二基模光信号。
7、在本发明中,所述步骤s105,包括:基于与每个所述待筛选光子灯笼对应的第二基模光信号以及所述第一基模光信号,确定每个所述待筛选光子灯笼对应的基模光信号集合;基于每个所述待筛选光子灯笼对应的基模光信号集合,对所述目标光纤陀螺进行数据采集,得到多组陀螺输出数据。
8、在本发明中,所述步骤s106,包括:分别对多组所述陀螺输出数据进行数据误差分析,确定与每组所述陀螺输出数据对应的误差分析结果;对每组所述陀螺输出数据对应的误差分析结果进行误差数值排序,确定目标排序结果;通过所述目标排序结果进行陀螺精度分析,确定目标精度分析结果。
9、在本发明中,在所述通过所述目标排序结果进行陀螺精度分析,确定目标精度分析结果步骤之后,还包括:通过所述目标排序结果对多个待筛选光子灯笼进行筛选,得到至少一个筛选后的目标光子灯笼;基于所述目标精度分析结果,对至少一个所述筛选后的目标光子灯笼进行配置信息采集,确定目标光子灯笼配置信息,并将所述目标光子灯笼配置信息传输至预置的数据库。
10、本发明还提供了一种基于光子灯笼的光纤陀螺精度分析系统,包括:
11、信息获取模块,用于获取目标光纤陀螺中少模保偏光纤的配置信息,并对所述少模保偏光纤的配置信息进行解析,得到与所述少模保偏光纤对应的多个光传输模式;
12、信道确定模块,用于对所述多个光传输模式进行信道匹配,确定多个光传输信道;
13、灯笼匹配模块,用于基于所述多个光传输信道从候选光子灯笼集合中进行灯笼匹配,得到多个待筛选光子灯笼;
14、信号传输模块,用于通过多个所述待筛选光子灯笼分别对输入的第一基模光信号进行多次传输,得到与每个所述待筛选光子灯笼对应的第二基模光信号;
15、数据采集模块,用于基于与每个所述待筛选光子灯笼对应的第二基模光信号以及所述第一基模光信号,对所述目标光纤陀螺进行数据采集,得到多组陀螺输出数据;
16、精度分析模块,用于分别对多组所述陀螺输出数据进行数据误差分析,确定多个误差分析结果,通过所述多个误差分析结果进行陀螺精度分析,确定目标精度分析结果。
17、本发明中,获取目标光纤陀螺中少模保偏光纤的配置信息,并对所述少模保偏光纤的配置信息进行解析,得到与所述少模保偏光纤对应的多个光传输模式;对所述多个光传输模式进行信道匹配,确定多个光传输信道;基于所述多个光传输信道从候选光子灯笼集合中进行灯笼匹配,得到多个待筛选光子灯笼;通过多个所述待筛选光子灯笼分别对输入的第一基模光信号进行多次传输,得到与每个所述待筛选光子灯笼对应的第二基模光信号;基于与每个所述待筛选光子灯笼对应的第二基模光信号以及所述第一基模光信号,对所述目标光纤陀螺进行数据采集,得到多组陀螺输出数据;分别对多组所述陀螺输出数据进行数据误差分析,确定多个误差分析结果,通过所述多个误差分析结果进行陀螺精度分析,确定目标精度分析结果。本发明实施例中,服务器通过光子灯笼对输入的基模光进行多次模式转换及传输,在不增加光纤长度的同时,增加了传播光程,使得有效敏感面积增大,在光子灯笼应用时,其每一根输入光纤分别与一根单模光纤熔接,输出端的少模尾纤则与传输系统的少模光纤进行熔接,从而把每根单模光纤中传输的基模,转换为少模光纤中对应的各阶模式,以进一步提升对光纤陀螺进行精度分析时的准确率。
- 还没有人留言评论。精彩留言会获得点赞!