基于深度学习辅助的卫惯组合定位方法及导航方法与流程
本发明属于定位,具体涉及一种基于深度学习辅助的卫惯组合定位方法及导航方法。
背景技术:
1、随着经济技术的发展和人们生活水平的提高,定位技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障定位的精度和持续性,就成为了研究人员的研究重点之一。目前,为了保证定位过程的精确性和持续性,基于gnss(全球导航卫星系统)与mems imu(微机电惯性设备)的组合导航定位技术已成为室内外无缝导航定位领域一个研究热点。
2、在实际应用中,在室内、地下等gnss拒止的室内环境下,由于没有gnss观测的约束,惯导系统的递推误差将会快速发散;这使得定位误差会随时间迅速增长,最终导致定位结果无法使用。目前,虽然能够采用误差发散慢、精度高的精密imu器件来解决这一问题,但是精密imu器件的成本高昂。同时,虽然融合多种传感器(比如融入视觉传感器等)的定位方法能够有效进行高精度持续定位,但是这类方法需要增加额外的传感器,实际使用时并不方便,而且同样也会增加用户的成本。因此,目前的常用的定位方法,都无法实现低成本和持续性的高精度定位。
技术实现思路
1、本发明的目的之一在于提供一种精度高、可靠性高、持续性好且成本低廉的基于深度学习辅助的卫惯组合定位方法。
2、本发明的目的之二在于提供一种包括了所述基于深度学习辅助的卫惯组合定位方法的导航方法。
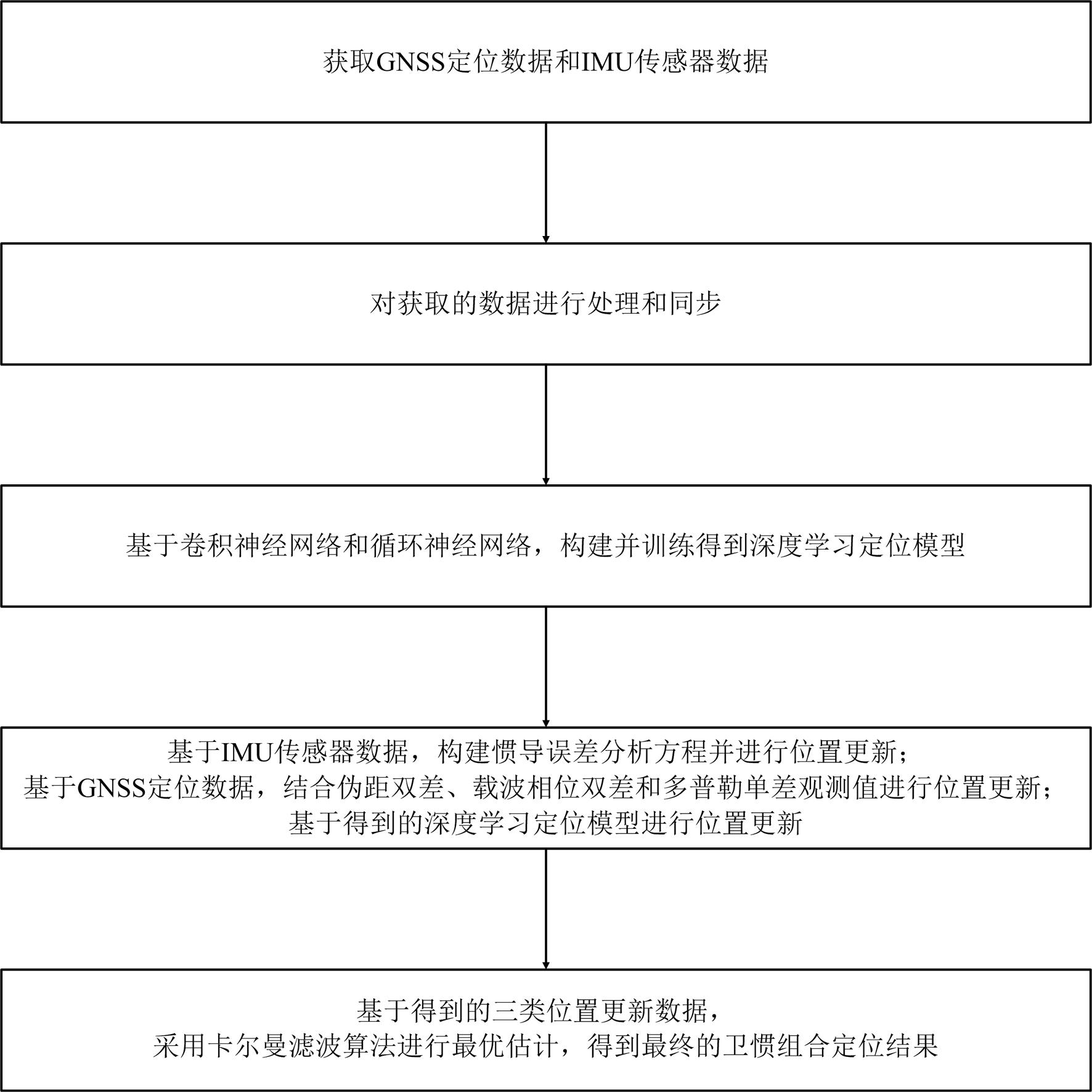
3、本发明提供的这种基于深度学习辅助的卫惯组合定位方法,包括如下步骤:
4、s1. 获取gnss定位数据和imu传感器数据;
5、s2. 对步骤s1获取的数据进行处理和同步;
6、s3. 基于卷积神经网络和循环神经网络,构建并训练得到深度学习定位模型;
7、s4. 基于imu传感器数据,构建惯导误差分析方程并进行位置更新;基于gnss定位数据,结合伪距双差、载波相位双差和多普勒单差观测值进行位置更新;基于步骤s3得到的深度学习定位模型进行位置更新;
8、s5. 基于步骤s4得到的三类位置更新数据,采用卡尔曼滤波算法进行最优估计,得到最终的卫惯组合定位结果。
9、所述的步骤s1,具体包括如下步骤:
10、获取的gnss定位数据包括卫星星历数据、载波相位数据、伪距数据、多普勒原始观测数据和gnss基站差分数据;
11、获取的imu传感器数据包括imu原始测量数据。
12、所述的步骤s2,具体包括如下步骤:
13、对获取的gnss定位数据进行数据清洗,滤除异常数据;
14、基于pps授时系统,对获取的imu原始测量数据和gnss定位数据进行时间同步。
15、所述的步骤s3,具体包括如下步骤:
16、取设定时间段内的处理后的imu传感器的加速度值和角速度值,并转换到导航坐标系下;
17、将得到的数据输入标准cnn卷积神经网络,提取得到行人状态的隐藏特征;
18、将得到的行人状态的隐藏特征输入若干个lstm长短期记忆网路中,学习得到行人运动状态的时序特征;
19、将得到的行人运动状态的时序特征,经过若干个全连接网络处理,得到深度学习定位模型预测的相对定位结果;
20、根据得到预测的相对定位结果与真实的相对定位结果,采用mse均方根作为误差函数,对深度学习定位模型进行迭代训练直至误差函数达到最小值,完成深度学习定位模型的训练。
21、采用如下算式计算预测的相对定位结果:其中为预测的相对定位结果;度学习定位模型的模型函数; n为设定时间段内的数据数量;为 m时刻导航坐标系的加速度值且,为 m时刻imu坐标系到导航坐标系的转换函数, a为imu传感器中加速度计输出的加速度值,为imu传感器中加速度计的零漂,为重力加速度值;为 m时刻导航坐标系的角速度值且, w为imu传感器中角速度计输出的角速度值,为imu传感器中角速度计的零漂。
22、步骤s4所述的基于imu传感器数据,构建惯导误差分析方程并进行位置更新,具体包括如下步骤:
23、构建的惯导误差分析方程,具体包括如下的位置误差微分方程、速度误差微分方程和姿态误差微分方程:式中为位置误差微分值;为导航坐标系中的导航坐标系相对于ecef坐标系的角速度;为导航坐标系下的位置误差;为计算坐标系到导航坐标系之间的失准角;为导航坐标系下的速度;为导航坐标系下的速度误差;为速度误差微分值;为载体坐标系到导航坐标系的转换矩阵;为加速度误差;为导航坐标系下的加速度;为导航坐标系下的姿态角;为地球自转角速度在导航坐标系的投影;为地球自转角速度在导航坐标系的投影的误差值;为导航坐标系中的导航坐标系相对于ecef坐标系的角速度的误差值;为重力误差;为姿态误差微分值;为导航坐标系中导航坐标系相对于惯性坐标系的角速度;为导航坐标系中导航坐标系相对于惯性坐标系的角速度误差值;为导航坐标系中的角速度的误差值。
24、步骤s4所述的基于gnss定位数据,结合伪距双差、载波相位双差和多普勒单差观测值进行位置更新,具体包括如下步骤:
25、伪距双差观测更新:ecef坐标系下的速度值
26、根据伪距双差的观测值与估计值,构建伪距双差观测更新方程为:式中为伪距双差观测向量;为载波波长;为导航坐标系下基站对卫星 i的观测矢量;为导航坐标系下基站对卫星 j的观测矢量;为接收机的ecef坐标值;为基准站的ecef坐标值;为k时刻接收机与基站对第 i颗卫星的伪距观测之差与第 j颗卫星的伪距观测之差的差值;为导航坐标系到ecef坐标系的转换矩阵;为载体在导航坐标系下的坐标值;为导航坐标系原点在ecef坐标系中的坐标值;
27、载波相位双差观测更新:
28、根据载波相位双差的观测值与估计值,构建载波相位双差观测更新方程为:式中为载波相位双差观测向量;为 k时刻第 i颗卫星与第 j颗卫星观测的整周模糊度差值;为 k时刻接收机与基站对第 i颗卫星的载波相位观测之差与第 j颗卫星的载波相位观测之差的差值;
29、多普勒单差更新:
30、根据多普勒单差的观测值与估计值,构建多普勒单差观测更新方程为:式中为多普勒单差观测向量;为第 i颗卫星的速度值;为载体在ecef坐标系下的速度值;为第 i颗卫星的频漂;为第 i颗卫星与第 j颗卫星观测的多普勒差值;为载体在导航坐标系下的速度值。
31、步骤s4所述的基于步骤s3得到的深度学习定位模型进行位置更新,具体包括如下步骤:
32、根据深度学习定位模型输出的相对定位结果与导航坐标系两个时刻的位置之差,构建深度学习定位模型更新方程为:式中为深度学习定位模型的观测向量;为第 i时刻载体在导航坐标系下的坐标值;为深度学习定位模型输出的第 i时刻到第 j时刻的相对定位结果;为马氏距离。
33、步骤s5所述的基于步骤s4得到的三类位置更新数据,采用卡尔曼滤波算法进行最优估计,具体包括如下步骤:
34、对gnss定位数据、深度学习定位模型的预测值和imu惯导系统的递推结果,采用卡尔曼滤波最优估计进行联合优化,得到最优的位姿估计;
35、卡尔曼滤波系统方程分为状态方程和更新方程为:式中为 k时刻的状态估计向量;为 k-1时刻到 k时刻的状态转移矩阵;为 k-1时刻的过程噪声矩阵;为 k-1时刻的系统噪声矩阵;为 k时刻的观测向量;为 k时刻的观测更新矩阵;为 k时刻的观测噪声矩阵;
36、卡尔曼滤波系统过程分为预测和更新两部分,预测过程为:式中为 k-1时刻预测的状态估计向量;为 k-1时刻预测的协方差矩阵;为 k-1时刻到 k时刻的状态转移矩阵的转置;为 k-1时刻到 k时刻的过程噪声矩阵;为 k-1时刻系统噪声的协方差矩阵;
37、更新过程为:式中为 k时刻卡尔曼滤波增益;为 k时刻的观测更新矩阵;为 k时刻观测噪声协方差。
38、本发明还提供了一种包括了所述基于深度学习辅助的卫惯组合定位方法的导航方法,具体包括如下步骤:
39、a. 实时获取gnss定位数据和imu传感器数据;
40、b. 采用所述的基于深度学习辅助的卫惯组合定位方法,进行实时定位;
41、c. 根据步骤b得到的实时定位结果,进行实时导航。
42、本发明提供的这种基于深度学习辅助的卫惯组合定位方法及导航方法,采用深度学习方法,通过从gnss和mems imu原始数据中学习行人的运动特征,并输出相对定位,然后将相对定位结果紧耦合到卫惯组合导航模型中进行约束,抑制定位误差的发散;因此本发明的精度高、可靠性高、持续性好且成本低廉。
- 还没有人留言评论。精彩留言会获得点赞!