河工模型地形测量方法、装置及设备与流程
本发明实施例涉及水利水电,具体涉及河工模型地形测量方法、装置及设备。
背景技术:
1、河工模型是运用河流动力学知识,根据水流和泥沙运动力学相似原理,模拟与原型相似的边界条件和动力学条件,用于研究河流在天然河流情况下或在有水工建筑物的情况下的水流结构、河床演变过程和工程方案效果的一种常用模型,通常通过相似性原理将天然河流按一定比例缩小制作而成。河道地形的冲淤变化与河床演变规律直接影响工程的运行并且能够间接反应工程方案实施的效果,因此河道地形的冲淤变化通常是河工模型试验研究的重点,快速准确地完成地形测量至关重要。
2、传统的地形测量方法有测针测量法、钢尺测量法、水准仪测量方法、电阻测淤仪、激光扫描仪、近景摄影测量、超声地形仪和激光测距仪等。其中,测针测量法、钢尺测量法、水准仪测量法和电阻测量法都属于接触式测量,测量过程容易对地形造成一定的破坏,受人工操作的影响,测量的精度普遍不高,而且测点有限,最后获得的数据量也不大;激光扫描仪、近景摄影测量和激光测距仪在测量精度上已经有一定的提高,近景摄影测量甚至还可以测出三维的地形图。但是这些方法在进行地形测量之前都必须将河工模型内的水全部排干,尤其对于一些地形比较复杂的模型,很难做到在不破坏地形的前提上将水全部排干。
3、为解决上述因在进行地形测量之前必须将河工模型内的水全部排干而导致的操作不便,测量效率低的问题,有公司推出了超声地形仪。其虽然可以在不排水的情况下进行地形测量,但是该超声地形仪以测桥为计算基准面,这就要求测桥必须保持全段水平。然而实际的情况是,不仅测桥两端的测轨高程存在一定偏差,而且每次测量时也无法保证测桥完全放置在测轨的同一个位置处。大型河工模型的跨度一般都较大,所需测桥较长,挠度对测桥的影响也较大。上述这些因素不仅会导致测桥无法保持全段水平,而且每次测量时测桥形变的情况还不一样。采用上述超声地形仪进行地形测量时却默认测桥为完全水平且高程相同,这就导致地形测量误差大。尤其对于地形变化较小的河工模型来说,这些误差对试验结果的影响更大,甚至会导致地形测量结果与试验实际情况完全相悖,例如试验观察到略有淤积,但是地形测量结果却显示冲刷。
技术实现思路
1、本发明实施例提供一种河工模型地形测量方法、装置及设备,用以解决现有地形测量方法误差大的问题。
2、第一方面,本发明实施例提供一种河工模型地形测量方法,包括:
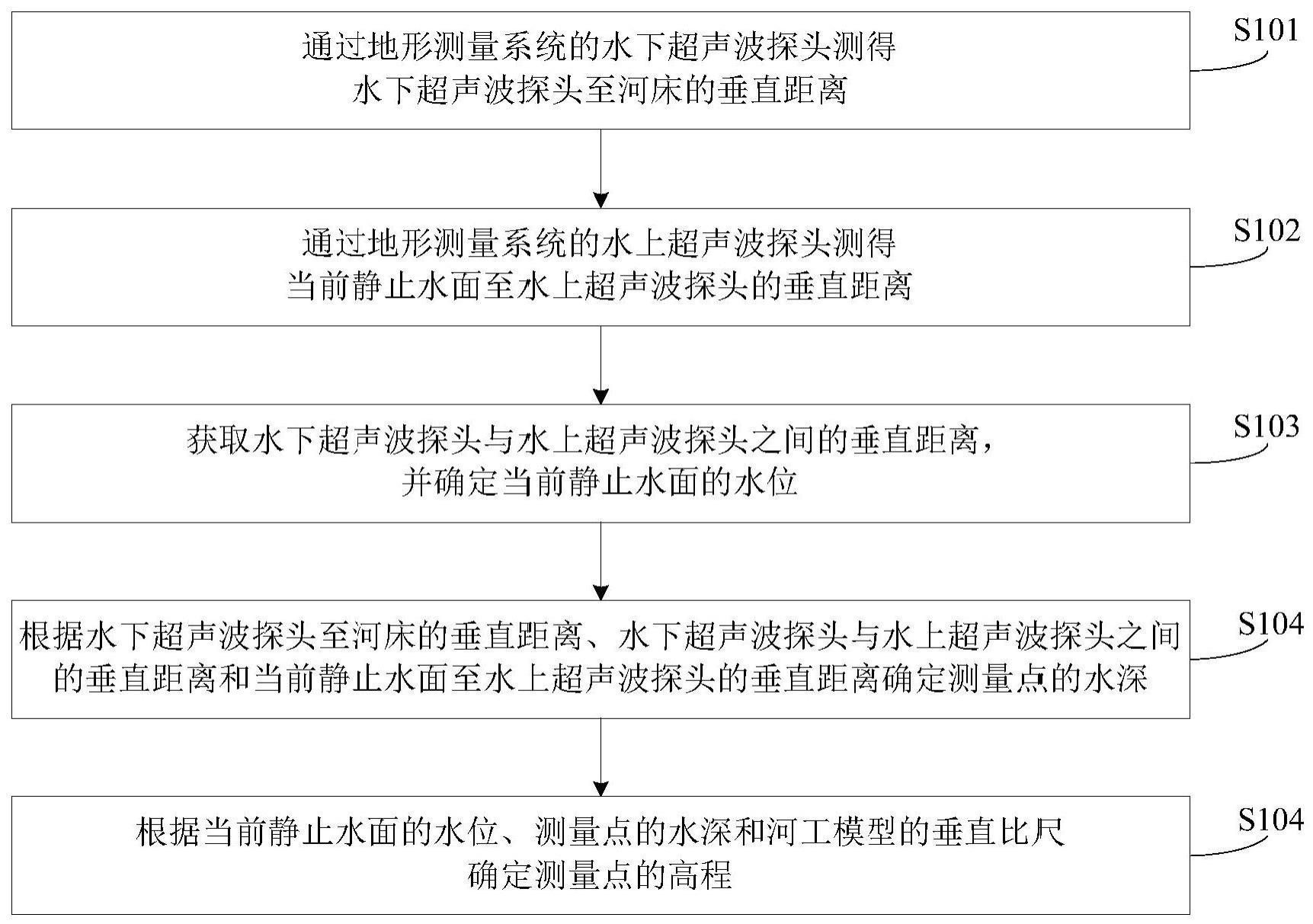
3、通过地形测量系统的水下超声波探头测得水下超声波探头至河床的垂直距离;
4、通过地形测量系统的水上超声波探头测得当前静止水面至水上超声波探头的垂直距离;
5、获取水下超声波探头与水上超声波探头之间的垂直距离,并确定当前静止水面的水位;
6、根据水下超声波探头至河床的垂直距离、水下超声波探头与水上超声波探头之间的垂直距离和当前静止水面至水上超声波探头的垂直距离确定测量点的水深;
7、根据当前静止水面的水位、测量点的水深和河工模型的垂直比尺确定测量点的高程。
8、一种实施例中,根据水下超声波探头至河床的垂直距离、水下超声波探头与水上超声波探头之间的垂直距离和当前静止水面至水上超声波探头的垂直距离确定测量点的水深包括:
9、测量点的水深根据如下表达式确定:
10、ha=hb+h0-hz;
11、其中,ha表示测量点的水深;hb表示水下超声波探头至河床的垂直距离;h0表示水下超声波探头与水上超声波探头之间的垂直距离;hz表示当前静止水面至水上超声波探头的垂直距离。
12、一种实施例中,根据当前静止水面的水位、测量点的水深和河工模型的垂直比尺确定测量点的高程包括:
13、测量点的高程根据如下表达式确定:
14、
15、其中,h表示测量点的高程;z表示当前静止水面的水位;ha表示测量点的水深;λh表示河工模型的垂直比尺。
16、一种实施例中,所述方法还包括:
17、通过地形测量系统的激光测距仪测得激光发射位置至水下超声波探头的水平距离;
18、通过地形测量系统的激光测距仪测得激光发射位置至激光反射板的实时距离;
19、根据激光发射位置至水下超声波探头的水平距离、激光发射位置至激光反射板的实时距离和河工模型的水平比尺确定测量点的起点距。
20、一种实施例中,根据激光发射位置至水下超声波探头的水平距离、激光发射位置至激光反射板的实时距离和河工模型的水平比尺确定测量点的起点距包括:
21、测量点的起点距根据如下表达式确定:
22、
23、其中,x表示测量点的起点距;xa表示激光发射位置至激光反射板的实时距离;xb表示激光发射位置至水下超声波探头的水平距离;λl表示河工模型的水平比尺。
24、一种实施例中,所述方法还包括:
25、以测量点的起点距作为横坐标,以测量点的水深和/或测量点的高程作为纵坐标,在显示界面上绘制水深和/或高程的曲线。
26、一种实施例中,所述方法还包括:
27、在进行地形测量之前,确定各个待测断面的测量范围,并根据各个待测断面的测量范围以及河工模型的比尺参数生成测量数据文件;
28、在进行地形测量时,将测量数据文件导入测量软件。
29、第二方面,本发明实施例提供一种河工模型地形测量装置,包括:
30、第一测量模块,用于通过地形测量系统的水下超声波探头测得水下超声波探头至河床的垂直距离;
31、第二测量模块,用于通过地形测量系统的水上超声波探头测得当前静止水面至水上超声波探头的垂直距离;
32、获取模块,用于获取水下超声波探头与水上超声波探头之间的垂直距离,并确定当前静止水面的水位;
33、第一处理模块,用于根据水下超声波探头至河床的垂直距离、水下超声波探头与水上超声波探头之间的垂直距离和当前静止水面至水上超声波探头的垂直距离确定测量点的水深;
34、第二处理模块,用于根据当前静止水面的水位、测量点的水深和河工模型的垂直比尺确定测量点的高程。
35、第三方面,本发明实施例提供一种电子设备,包括:
36、至少一个处理器和存储器;
37、存储器存储计算机执行指令;
38、至少一个处理器执行存储器存储的计算机执行指令,使得至少一个处理器执行如第一方面任一项所述的河工模型地形测量方法。
39、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如第一方面任一项所述的河工模型地形测量方法。
40、本发明实施例提供的河工模型地形测量方法、装置及设备,通过地形测量系统的水下超声波探头测得水下超声波探头至河床的垂直距离;通过地形测量系统的水上超声波探头测得当前静止水面至水上超声波探头的垂直距离;获取水下超声波探头与水上超声波探头之间的垂直距离,并确定当前静止水面的水位;根据水下超声波探头至河床的垂直距离、水下超声波探头与水上超声波探头之间的垂直距离和当前静止水面至水上超声波探头的垂直距离确定测量点的水深;根据当前静止水面的水位、测量点的水深和河工模型的垂直比尺确定测量点的高程。以当前静止水面的水位作为换算基准面来确定测量点的高程,避免了因地形测量系统两边的测轨不等高或测桥被压弯情况下引入较大误差,提高了测量精度;通过采用水下超声波探头在水下采集河道地形的数据,无需排出河工模型内的水,不仅能够有效避免排水测量对地形造成的破坏,而且操作便捷,测量效率高。
- 还没有人留言评论。精彩留言会获得点赞!