一种车辆剩余里程的预测方法、装置、设备及介质与流程
本发明涉及车辆评估领域,具体涉及一种车辆剩余里程的预测方法、装置、设备及介质。
背景技术:
1、在一些技术中,一般是通过计算车辆寿命里程与车辆已行驶里程的差值确定车辆剩余里程,来预测车辆剩余寿命,从而车辆寿命里程的高准确度是保证车辆剩余里程准确度的前提与保证。目前比较常用的方法是先确定soh(state ofhealth,电池健康状态)随着车辆已行驶里程变化而变化的趋势,然后找到80%soh位置的车辆目标行驶里程作为车辆寿命里程(80%soh通常是容量陡降的临界点,若汽车继续行驶,车辆的soh会在短时间下降,车辆达到使用寿命)。soh通常为充电过程的安时积分与额定容量的比值,由于充电数据不是完全连续的,并不是行驶到一定公里数就一定会充电,从而利用安时积分计算得到的容量通常都不准确,并且磷酸铁锂电池的安时积分更加不准确,因此我们很难通过大数据手段计算出非常准确的soh,导致随着车辆已行驶里程的增长soh的变化趋势不明显,确定80%soh位置的车辆目标行驶里程误差过大,进而导致车辆剩余里程计算不准确。故亟需一种新的方法能够提高预测车辆剩余里程的准确度。
技术实现思路
1、有鉴于此,本发明实施例提供了一种车辆剩余里程的预测方法、装置、设备及介质,以解决车辆剩余里程预测准确度低的问题。
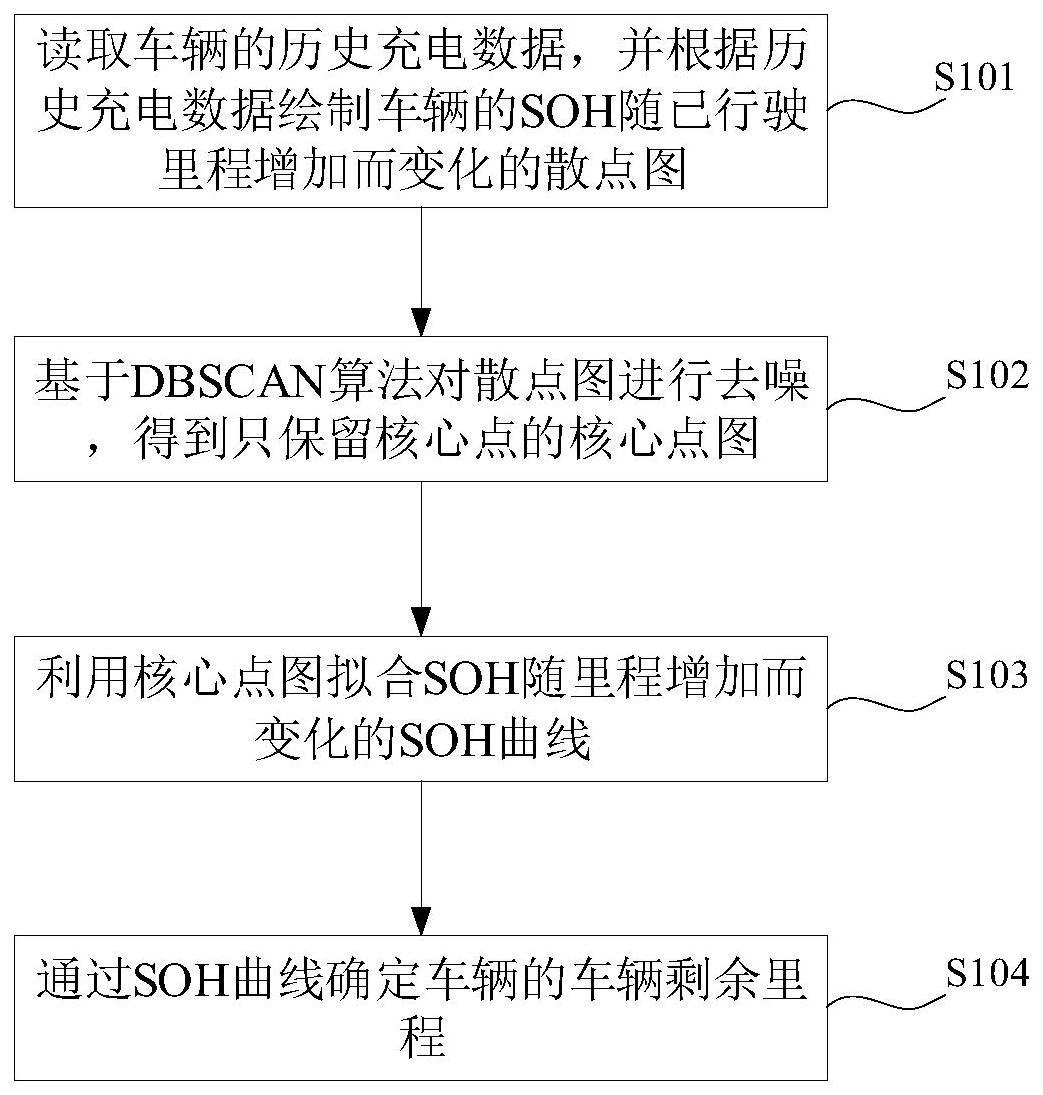
2、第一方面,本发明实施例提供了一种车辆剩余里程的预测方法,方法包括:读取车辆的历史充电数据,并根据历史充电数据绘制车辆的soh随已行驶里程增加而变化的散点图;基于dbscan算法对散点图进行去噪,得到只保留核心点的核心点图;利用核心点图拟合soh随里程增加而变化的soh曲线;通过soh曲线确定车辆的车辆剩余里程。
3、本实施例以车辆已行驶里程和soh分别为不同的坐标轴建立二维坐标系,通过车辆的历史充电数据确定每次充电的坐标点,将每次充电的数据点绘制在二维坐标系中,形成散点图。然后通过dbscan算法对散点图进行去噪,得到只保留核心点的核心点图,凸显soh随车辆行驶里程变化的趋势。然后利用核心点图拟合soh随里程增加而变化的soh曲线,并通过soh曲线确定预设soh位置的车辆寿命里程,提高了车辆寿命里程的准确率,进而计算车辆寿命里程与当前车辆已行驶里程的差值,得到更加准确的车辆剩余里程。
4、结合第一方面,在一种实施方式中,基于dbscan算法对散点图进行去噪,得到只保留核心点的核心点图,包括:基于预设里程区间对散点图中表示车辆已行驶里程的坐标进行分组,并将属于同一里程组的散点聚合到同一里程组坐标下;针对同一里程组坐标下的点,将预设邻域半径作为每个点沿soh轴方向的筛选范围执行dbscan算法,得到只保留核心点的核心点图。
5、本实施例考虑到实际场景中充电里程间隔有大有小,dbscan算法的邻域半径确定困难,半径长度确定的不合适会令核心点确定不准确,从而通过预设里程区间对散点图的车辆已行驶里程坐标进行分组,在车辆已行驶里程坐标轴上,将属于同一里程组的散点聚合到同一里程组坐标下,保证一定里程范围内的点均集中在一个里程组坐标下,确定邻域半径更加容易,且计算每个点邻域内的点只需在同一里程组坐标下寻找,计算效率更高。
6、结合第一方面或其对应的实施方式,在一种实施方式中,针对同一里程组坐标下的点,将预设邻域半径作为每个点沿soh轴方向的筛选范围执行dbscan算法,得到只保留核心点的核心点图,包括:计算与当前点同一里程组坐标的其他点到当前点的点距离,并将点距离小于预设邻域半径的其他点作为邻域点;当邻域点的数量大于或等于预设最少点数量时,将当前点作为核心点;通过计算与当前点同一里程组坐标的其他点到当前点的点距离的步骤到当邻域点的数量大于或等于预设最少点数量时,将当前点作为核心点的步骤遍历散点图中的每个点,得到全部核心点,基于全部核心点生成核心点图。
7、通过对dbscan算法的改进,判断每个点是否是核心点时,只需在同一里程组坐标下寻找每个点的邻域点,进而根据预设最少点数量判断核心点,无需通过邻域半径在圆形范围内寻找,比传统dbscan算法的计算效率更高。
8、结合第一方面或其对应的实施方式,在一种实施方式中,确定预设邻域半径和预设最少点数量的步骤包括:初始化邻域半径的第一筛选范围和最少点数量的第二筛选范围;分别在第一筛选范围和第二筛选范围中以第一预设步长和第二预设步长取值,得到候选邻域半径和候选最少点数量;基于候选邻域半径和候选最少点数量执行dbscan算法,得到只保留核心点的核心点图;分析核心点图的整体趋势是否随着里程组号的增加呈下降趋势;当核心点图的整体趋势呈下降趋势时,将候选邻域半径和候选最少点数量作为预设邻域半径和预设最少点数量;当核心点图的整体趋势未呈下降趋势时,返回分别在第一筛选范围和第二筛选范围中以第一预设步长和第二预设步长取值,得到候选邻域半径和候选最少点数量的步骤。
9、本实施例只需通过dbscan算法确定核心点,无需分簇分类,故相比传统dbscan算法,本实施例按照的第一预设步长和第二预设步长迭代取值,利用不同的候选邻域半径和候选最少点数量进行去噪,直至核心点图呈现出比较明显的下降趋势即可,使本实施例提供的调参方法效率更高。
10、结合第一方面或其对应的实施方式,在一种实施方式中,预设里程区间为续航里程的2倍,第一筛选范围是0-5,第二筛选范围是0-10,第一预设步长是0.1,第二预设步长是0.5。
11、考虑到2次续航里程的公里数中soh差基本不会超过5,故第一筛选范围定为0-5(以0.1间隔进行调整),同时因为两次续航里程的充电次数通常不会超过10次,所以第二筛选范围设定为0-10(以0.5间隔进行调整),使得调参过程的准确率和效率均有提高。
12、结合第一方面或其对应的实施方式,在一种实施方式中,根据历史充电数据绘制车辆的soh随已行驶里程增加而变化的散点图,包括:获取当前车辆电池型号的电池数据,并根据电池数据确定电池的额定容量与环境温度之间的容量温度变化关系;通过历史充电数据获取每次充电的环境温度,并通过每次充电的环境温度和容量温度变化关系修正每次充电的额定容量;利用每次充电修正后的额定容量计算每次充电的soh;从历史充电数据中读取每次充电对应的车辆已行驶里程;利用每次充电的soh和车辆已行驶里程组成的数据对,绘制车辆的soh随已行驶里程增加而变化的散点图。
13、本实施例还根据额定容量随温度的变化关系对计算的每次充电的soh进行修正,提高soh的准确率,进而提高散点图的准确率,进而提高确定车辆剩余里程的准确率。
14、结合第一方面或其对应的实施方式,在一种实施方式中,利用核心点图拟合soh随里程增加而变化的soh曲线,包括:将核心点图中的核心点代入下式,拟合的得到soh曲线
15、
16、式中,y表示soh,x表示组号,c、k和x0是待拟合的系数。
17、由于电池容量的衰减趋势通常不为线性下降,而是一种类s型的曲线,本实施例对线性回归中的西格玛曲线的进行镜像变换,并利用镜像变换后的西格玛曲线拟合soh曲线,提高了soh曲线的准确率。
18、第二方面,本发明实施例提供了一种车辆剩余里程的预测装置,装置包括:绘图模块,读取车辆的历史充电数据,并根据历史充电数据绘制车辆的soh随已行驶里程增加而变化的散点图;去噪模块,基于dbscan算法对散点图进行去噪,得到只保留核心点的核心点图;曲线拟合模块,利用核心点图拟合soh随里程增加而变化的soh曲线;剩余里程计算模块,通过soh曲线确定车辆的车辆剩余里程。
19、第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的一种车辆剩余里程的预测方法。
20、第四方面,本发明实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的一种车辆剩余里程的预测方法。
- 还没有人留言评论。精彩留言会获得点赞!