基于UWB、IMU、GNSS融合的无人设备多场景无缝定位方法
本发明涉及无人驾驶定位导航。更具体地说,本发明涉及一种基于uwb、imu、gnss融合的无人设备多场景无缝定位方法。
背景技术:
1、随着科学技术的不断发展和移动机器人涉及领域的逐渐扩展,对既能实现室内定位也能实现室外定位机器人的需求日趋强烈。为了实现无人设备室内外环境下定位的连续性和稳定性,使其能够实现无缝精准定位衔接,无缝定位技术应运而生。目前,gnss(globalnavigation satellite system)已经可以提供实时且稳定的全球定位导航服务。然而在超市、医院、图书馆、火车站、地下车库、机场大厅、地下室等众多类似室内环境或高大建筑密集的街区,卫星信号严重衰减,即卫星导航系统欠缺室内定位能力,不能满足公共需求,存在“最后一公里”瓶颈。由此也催生了诸多室内定位技术,比如无线局域网技术(wirelesslocal areanetwork,wlan)、蓝牙技术、射频识别技术(radio frequency identification,rfid)、紫蜂无线通信技术(zigbee)、超宽带无线电定位技术(ultra wide band,uwb)等。然而大多数无人设备在实际生活中的定位应用时,往往不会拘泥于单一的室内或室外场景,我们需要它移动于多种不同的室内外场景。
2、而现有技术中也有一些方案来实现无人设备室内外的定位,如申请号为201910196306.1的基于gnss、uwb、imu、激光雷达、码盘的室外巡逻机器人多环境联合定位方法,其存在的问题在于:没有对室内外场景环境做详细分析,根据不同环境特征选取不同定位技术,尤其是室内外过渡区域存在的定位稳定性和高精度问题没有得到解决,达不到真正意义上的无缝定位。
3、申请号为202210634851.6的一种室内室外无缝结合定位方法及系统,其存在的问题在于:采用蓝牙信标进行蓝牙定位的方法并不能达到无人设备所需要的精度和响应速度,并且对提及的多种定位组合方式的切换融合方法没有阐述具体。
4、以及申请号为202210937145.9的基于室内停车场定位系统的停车与寻车方法,其存在的问题在于:仅在室内停车场环境下使用多传感器融合定位使得定位精度达到厘米级,而在室外环境下的gnss/imu的组合定位精度不满足无人设备的使用,且对于室内外交互区域的定位切换没有具体阐述。
5、由此可知,现有技术中,无人(驾驶)设备存的普遍问题在于其定位精度只能到分米级别,不能做到厘米级别的定位,并不能满足无人(驾驶)设备对定位精度的基本要求。并且对于无人(驾驶)设备处于室内外交互场景下所存在的无缝定位信息不准确、不稳定等问题没有一个较好的解决方案。
技术实现思路
1、本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
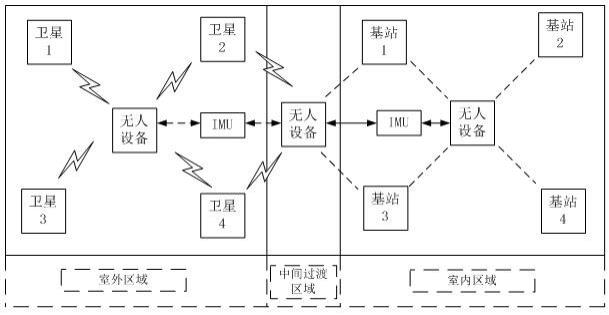
2、为了实现本发明的这些目的和其它优点,提供了一种基于uwb、imu、gnss融合的无人设备多场景无缝定位方法,对于室外环境,无人设备直接采用全球导航卫星系统gnss与惯性测量单元imu进行数据融合构成的组合式定位方式ⅰ;
3、对于室内环境,无人设备直接采用超宽带uwb技术与imu进行数据融合构成的组合式定位方式ⅱ;
4、对于室内外的中间过渡区域,通过引入权重因子对gnss和uwb的定位数据进行修正,以基于修正结果对无人设备当前的定位方式进行切换,完成多场景转换过程中的无缝定位。
5、优选的是,所述切换的过程被配置为包括:
6、s1,在无人设备的定位系统初始化后,将无人设备接收到的gnss的卫星数量g、uwb的基站数量u与无人设备中预设的阈值n进行比较,若g≥n且u<n时,则判定无人设备在室外环境区域,进入步骤s2;
7、若g<n且u≥n时,则判定无人设备在室内环境区域,进入步骤s3;
8、若g≥n且u≥n时,则判定无人设备位于室内外的中间过渡区域,进入步骤s4;否则,重新对定位系统进行初始化;
9、s2,无人设备采用组合式定位方式ⅰ进行设备定位;
10、s3,无人设备采用组合式定位方式ⅱ进行设备定位;
11、s4,无人设备将组合式定位方式ⅰ、组合式定位方式ⅱ输出的定位数据作为无人设备中主滤波器的输入信息,无人设备基于主滤波器收到的输入信息个数,以确定是否启动中间过渡区域的定位方式判决程序。
12、优选的是,在s4中,当主滤波器收到的输入信息个数为两个时,则认定无人设备当前处于中间过渡区域,无人设备启动定位方式判决程序,所述判决程序的判决流程被配置为包括:
13、基于gnss定位模块中rtk差分接收机所获取到的gnss的信号强度 r g、uwb定位模块中定位标签所获取到的uwb信号强度 r u,在主滤波器中采用权重因子 w对各信号强度值进行修正,并基于修改结果选择对应的定位方式。
14、优选的是,所述修正是采用如下公式,利用权重因子对 r g 、r u做加权平均计算:
15、 r=wr g +(1-w)r u
16、其中, w为权重因子, r为加权平均修正后的信号强度;
17、设rn为预设的信号强度判断阈值,在r≥rn时,无人设备采用组合式方式ⅰ进行设备定位,否则选择组合式定位方式ⅱ进行设备定位。
18、优选的是,在s2中,无人设备采用组合式定位方式ⅰ的过程中被配置为包括:
19、s20,无人设备通过uwb定位模块的uwb标签和基站进行移动标签位置计算,以获得无人设备当前的绝对定位信息;
20、s21,无人设备通过imu定位模块进行姿态、速度、位置计算,以获取当前无人设备的位姿变化信息ⅰ;
21、s22,将s20中得到的绝对定位信息与s21中得到的位姿变化信息ⅰ作为扩展卡尔曼滤波器ⅰ的输入,以得到实际的室内位置信息。
22、优选的是,在s3中,无人设备采用组合式定位方式ⅱ的过程中被配置为包括:
23、s30,无人设备通过gnss定位模块的rtk差分接收机,采用双天线进行定向计算,获取无人系统的姿态信息和位置信息;
24、s31,无人设备通过imu定位模块进行姿态、速度、位置计算,以获取当前无人设备的位姿变化信息ⅱ;
25、s32,将s30中得到的姿态信息和位置信息与s31中得到的位姿变化信息ⅱ作为扩展卡尔曼滤波器ⅱ的输入,以得到实际的室外位置信息。
26、本发明至少包括以下有益效果:其一,本发明在室外环境下,gnss+imu组合导航定位系统可以很大程度上校正gnss量测值和imu产生的累积误差定位问题;在室内环境下,用精度更高,更稳定的uwb定位设备代替了其余的室内定位设备,解决室内由于检测不到gnss信号而引起的定位信息丢失的问题,同时全程结合imu的相对定位信息,与uwb定位设备互相弥补了各自单传感器引起的误差问题,信息不稳定等问题,使得无人设备的定位精度可以达到厘米级。
27、其二,本发明应用在无人设备的高精度定位上时,因其集成民两种定位模式的导航方法,可以在室内外环境的变化时,根据卫星数量,基站数量,信号强度(rssi)等信息自适应切换选择定位模式,提供准确、连续的导航方案,为无人车提供稳定准确的室内外无缝定位服务,具有定位效果好、系统稳定、性价比高等优点。
28、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!