基于FMCW的量子激光雷达测速测距系统和方法
本发明涉及量子激光雷达,尤其涉及一种基于fmcw的量子激光雷达测速测距系统和方法。
背景技术:
1、激光雷达相比与传统的无线电雷达有着定向性好,分辨率高,抗干扰能力强,易于集成等优点近年来受到广泛的研究。随着技术不断发展,激光雷达的应用目前已延伸至多个领域,如汽车无人驾驶、机器人、地理测绘以及大气探测等。
2、目前,在通过经典脉冲激光雷达进行测速测距的过程中,由于时间-频率不确定关系的限制,在对经典(纠缠)脉冲同时进行tof与多普勒频移探测时,这两个物理量的探测精度与分辨率会相互制约。一方面,采用经典压缩脉冲方法,经典脉冲激光雷达原理上可将tof与多普勒频移探测这两个物理量的探测统一为先后两次脉冲tof这一个物理量的探测,从而实现无精度与分辨率制约的测距与测速。然而在实际探测中,受探测器时间分辨率的限制,区分由多普勒频移导致的tof变化是十分困难的。另一方面,采用量子压缩脉冲方法,量子脉冲激光雷达原理上可实现无精度与分辨率相互制约的tof与多普勒频移探测,从而实现无精度与分辨率制约的测距与测速。然而在实际探测中,除制备纠缠脉冲外,这种方案不仅要额外采用较为低效地非线性过程,而且在有损耗的情况下,在量子增强降低的同时测距与测速的能力也会降低。
3、因此,现有技术中通过激光雷达进行测速测距的过程中,存在测距与测速的精度与分辨率较低的问题。
技术实现思路
1、有鉴于此,有必要提供一种基于fmcw的量子激光雷达测速测距系统和方法,用以解决现有技术中通过激光雷达进行测速测距的过程中,存在的测距与测速的精度与分辨率较低的问题。
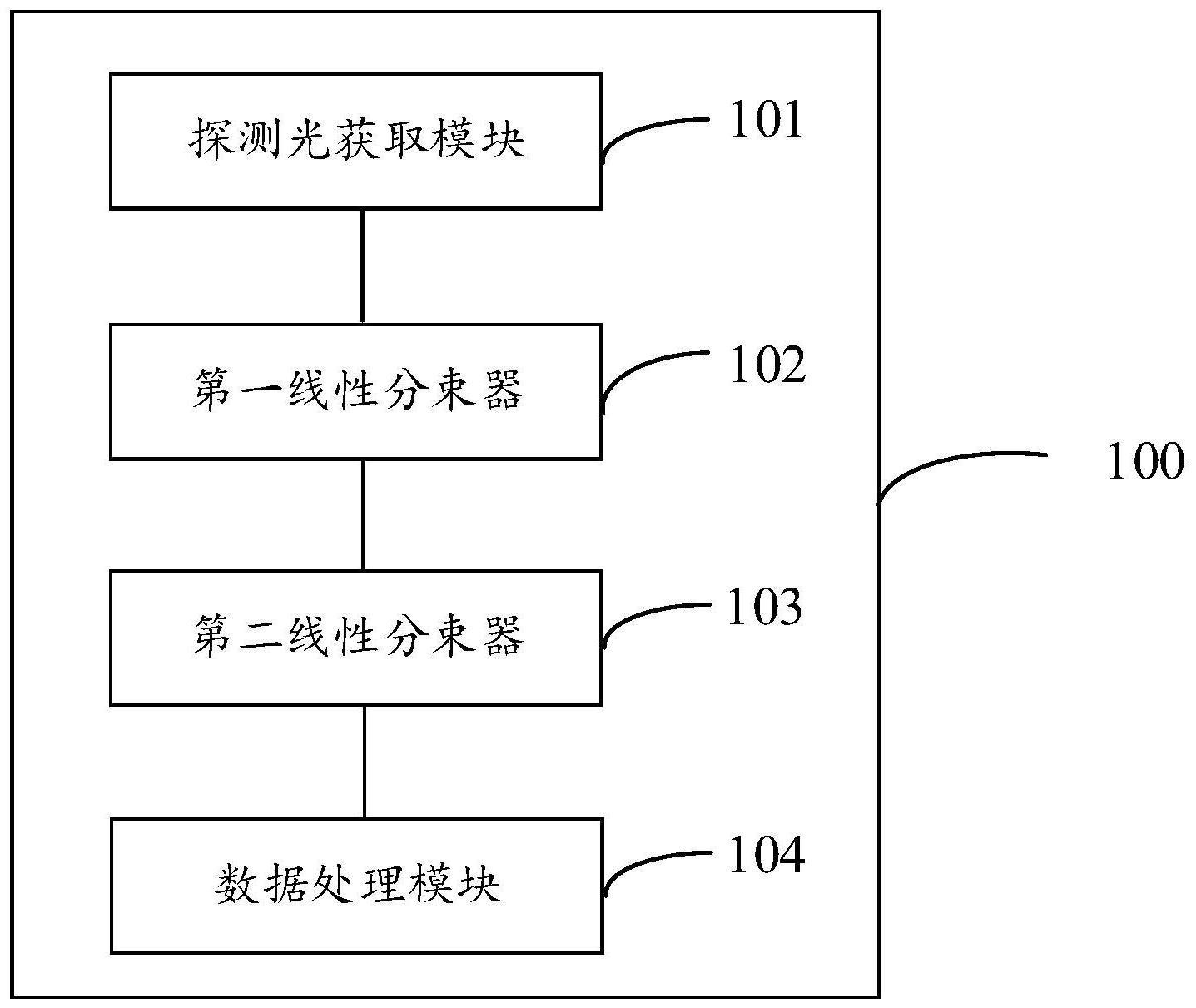
2、为了解决上述问题,本发明提供一种基于fmcw的量子激光雷达测速测距系统,包括:
3、探测光获取模块,用于基于非经典光,调制量子fmcw激光雷达的探测光;
4、第一线性分束器,用于对探测光进行分束处理,得到本振光和检测光,并将检测光发射至待测目标以获取回波光;
5、第二线性分束器,用于将本振光和回波光进行外差干涉,得到待测目标的拍频信号;
6、数据处理模块,用于根据拍频信号,确定待测目标的速度和/或距离。
7、进一步地,非经典光包括除激光以外,且具有相干特性的光。
8、进一步地,数据处理模块,用于对拍频信号进行离散傅立叶变换,得到拍频信号的频率信息;并根据频率信息,确定待测目标的速度和/或距离。
9、进一步地,探测光获取模块,用于周期性地调制量子fmcw激光雷达的探测光。
10、进一步地,第一线性分束器和第二线性分束器的的分束比相同。
11、为了解决上述问题,本发明还提供一种基于fmcw的量子激光雷达测速测距方法,应用于如上文任一技术方案所述的基于fmcw的量子激光雷达测速测距系统中,该方法包括:
12、基于非经典光,调制量子fmcw激光雷达的探测光;
13、根据第一线性分束器对探测光进行分束处理,得到本振光和检测光;并将检测光发射至待测目标以获取回波光;
14、将本振光和回波光通过第二线性分束器进行外差干涉,得到待测目标的拍频信号;
15、根据拍频信号,确定待测目标的速度和/或距离。
16、进一步地,根据拍频信号,确定待测目标的速度和/或距离,包括:
17、对拍频信号进行离散傅立叶变换,得到拍频信号的频率信息;
18、根据频率信息,确定待测目标的速度和/或距离;
19、其中,频率信息包括回波光与本振光的上升频率差和回波光与本振光的下降频率差。
20、进一步地,根据频率信息,确定待测目标的速度,包括:
21、根据上升频率差和下降频率差,确定回波光飞行时间;
22、根据回波光飞行时间,基于速度计算公式,确定待测目标的速度。
23、进一步地,根据频率信息,确定待测目标的距离,包括:
24、根据上升频率差和下降频率差,确定多普勒频移;
25、根据多普勒频移,基于距离计算公式,确定待测目标的距离。
26、进一步地,回波光飞行时间的计算公式为:
27、
28、其中,为上升频率差,为下降频率差,τ为回波光飞行时间,δω为调制带宽,tm为调制周期;
29、多普勒频移的计算公式为:
30、
31、其中,ωd为多普勒频移。
32、采用上述实施例的有益效果是:本发明提供一种基于fmcw的量子激光雷达测速测距系统和方法,该系统包括探测光获取模块、第一线性分束器、第二线性分束器和数据处理模块;通过调制出的基于非经典光的探测光对待测目标进行检测,获取到待测目标的拍频信号,并且能够根据拍频信号同时获取到待测目标的速度和距离。通过本申请中的探测光对待测目标进行测速测距,获取到的待测目标的速度的精度(分辨率)和距离的精度(分辨率)之间不存在零和博弈,并且能够有效提高获取到的待测目标的速度和距离的精度与分辨率。
技术特征:
1.一种基于fmcw的量子激光雷达测速测距系统,其特征在于,包括:
2.根据权利要求1所述的基于fmcw的量子激光雷达测速测距系统,其特征在于,所述非经典光包括除激光以外,且具有相干特性的光。
3.根据权利要求1所述的基于fmcw的量子激光雷达测速测距系统,其特征在于,所述数据处理模块,用于对所述拍频信号进行离散傅立叶变换,得到所述拍频信号的频率信息;并根据所述频率信息,确定所述待测目标的速度和/或距离。
4.根据权利要求1所述的基于fmcw的量子激光雷达测速测距系统,其特征在于,所述探测光获取模块,用于周期性地调制量子fmcw激光雷达的探测光。
5.根据权利要求1所述的基于fmcw的量子激光雷达测速测距系统,其特征在于,所述第一线性分束器和所述第二线性分束器的分束比相同。
6.一种基于fmcw的量子激光雷达测速测距方法,其特征在于,所述方法应用于权利要求1-5任一项所述的基于fmcw的量子激光雷达测速测距系统中,所述方法包括:
7.根据权利要求6所述的基于fmcw的量子激光雷达测速测距方法,其特征在于,根据所述拍频信号,确定所述待测目标的速度和/或距离,包括:
8.根据权利要求7所述的基于fmcw的量子激光雷达测速测距方法,其特征在于,根据所述频率信息,确定所述待测目标的速度,包括:
9.根据权利要求8所述的基于fmcw的量子激光雷达测速测距方法,其特征在于,根据所述频率信息,确定所述待测目标的距离,包括:
10.根据权利要求9所述的基于fmcw的量子激光雷达测速测距方法,其特征在于,所述回波光飞行时间的计算公式为:
技术总结
本申请公开了一种基于FMCW的量子激光雷达测速测距系统和方法,该系统包括探测光获取模块、第一线性分束器、第二线性分束器和数据处理模块;通过调制出的基于非经典光的探测光对待测目标进行检测,获取到待测目标的拍频信号,并且能够根据拍频信号同时获取到待测目标的速度和距离。通过本申请中的探测光对待测目标进行测速测距,获取到的待测目标的速度的精度(分辨率)和距离的精度(分辨率)之间不存在零和博弈,并且能够有效提高获取到的待测目标的速度和距离的精度与分辨率。
技术研发人员:秦琦,黄明达,蒋占峰,陈红艺
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!