一种广域稀布阵列弱小目标探测方法与流程
本发明涉及波束形成及雷达目标探测领域,具体为一种广域稀布阵列弱小目标探测方法,可解决在广域稀布阵列因阵元间距过大而产生高旁瓣的情况下,大目标高旁瓣淹没小目标的问题。
背景技术:
1、广域稀布阵列因其阵元间距过大而带来的高旁瓣严重影响了目标探测的效果,特别是在多目标的情况下,大目标的高旁瓣会淹没小目标的主瓣,从而导致难以对小目标进行准确的探测。通过采用各种布阵优化算法及波束形成算法可降低方向图的旁瓣,但也存在局限性。
2、当前的布阵优化算法及波束形成算法大多应用于均匀阵列或阵元间距略大约半倍波长的阵列。然而,对于广域稀布阵列而言,阵元间距过大,采用如上方法对于旁瓣降低的效果十分有限,仍存在着高旁瓣,导致难以探测到小目标。
3、可见,若只采用降低旁瓣的布阵优化算法或波束形成算法,难以区分广域稀布阵列探测过程中的大小目标。
技术实现思路
1、本发明的目的在于避免上述背景技术中的不足之处而提供一种广域稀布阵列弱小目标探测方法,该方法将不同频点下的方向图函数以相参的形式进行联合,使得在主瓣增益不变的情况下,将旁瓣的增益大大降低,能够降低稀布阵列的高旁瓣对探测的不利影响,有益于小目标的探测。
2、本发明的目的是这样实现的:
3、一种广域稀布阵列弱小目标探测方法,包括以下步骤:
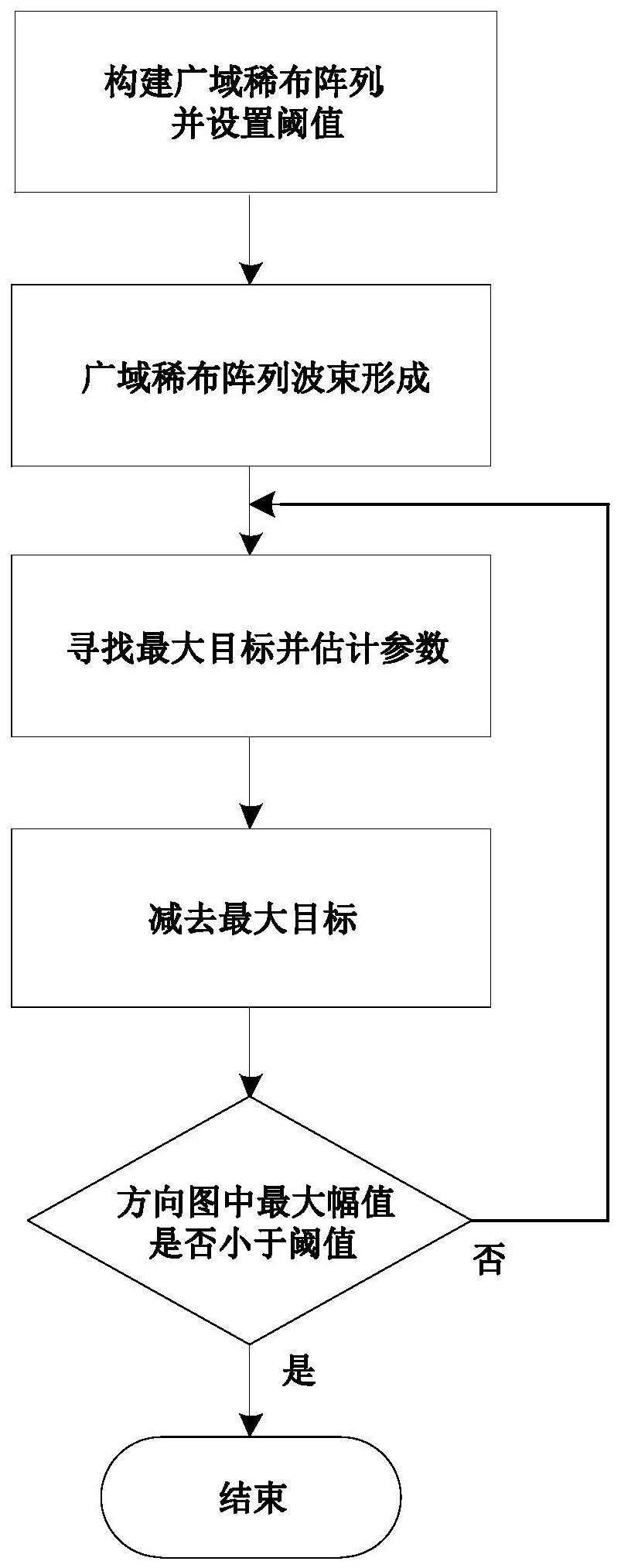
4、步骤1,构建广域稀布阵列,确定第m个阵元的坐标(xm,ym,zm),设置阈值th;
5、步骤2,广域稀布阵列波束形成,得到多目标的方向图;
6、
7、δr=xmcosθcosφ+ymcosθsinφ+zmsinθ
8、δr0=xmcosθ0cosφ0+ymcosθ0sinφ0+zmsinθ0
9、其中,fn(φ,θ)是指向为(θ0,φ0)的方向图函数,a为幅度加权系数,c为光速,f为工作频率,φ为方位角,θ为俯仰角,m是阵元的个数;
10、步骤3,寻找方向图中幅值最大的目标,并估计该点的位置(θi,φi)及幅值ai,并依据下式计算该目标的方向图函数;
11、
12、δr=xmcosθcosφ+ymcosθsinφ+zmsinθ
13、δri=xmcosθicosφi+ymcosθisinφi+zmsinθi
14、其中,fi(φ,θ)为当前方向图中找到的最大目标的方向图函数,i为寻找到的目标的序号;
15、步骤4,用步骤2中多目标的方向图函数减去步骤3中找到的目标的方向图函数,得到新的方向图函数fn-1(φ,θ);
16、fn-1(φ,θ)=fn(φ,θ)-fi(φ,θ)
17、步骤5,根据新的方向图函数得到方向图,根据阈值进行判断:若方向图中的最大值大于阈值th,则重复步骤3~4;若方向图中的最大值小于阈值th,则退出循环,完成弱小目标探测。
18、步骤1,构建广域稀布阵列,确定第m个阵元的坐标(xm,ym,zm),设置空域clean算法的阈值th;
19、步骤2,广域稀布阵列波束形成,得到多目标的方向图;
20、
21、δr=xmcosθcosφ+ymcosθsinφ+zmsinθ
22、δr0=xmcosθ0cosφ0+ymcosθ0sinφ0+zmsinθ0
23、其中,fn(φ,θ)是指向为(θ0,φ0)的方向图函数,a为幅度加权系数,c为光速,f为工作频率,φ为方位角,θ为俯仰角,m是阵元的个数;
24、步骤3,寻找方向图中幅值最大的目标,并估计该点的位置(θi,φi)及幅值ai,并依据下式计算该目标的方向图函数;
25、
26、δr=xmcosθcosφ+ymcosθsinφ+zmsinθ
27、δri=xmcosθicosφi+ymcosθisinφi+zmsinθi
28、其中,fi(φ,θ)为当前方向图中找到的最大目标的方向图函数,i为寻找到的目标的序号;
29、步骤4,用步骤2中多目标的方向图函数减去步骤3中找到的目标的方向图函数,得到新的方向图函数fn-1(φ,θ);
30、fn-1(φ,θ)=fn(φ,θ)-fi(φ,θ)
31、步骤5,在新的方向图中,根据阈值进行判断:若方向图中最大值大于th,则重复步骤3~4;若方向图中最大值小于th,则退出循环,完成稀布阵列空域clean算法;
32、本发明相比背景技术具有如下优点:
33、1、本发明通过迭代的方式,将空域内多目标的方向图将大小目标依次找到,并减去其主瓣及旁瓣,减去大目标旁瓣后的方向图具有更低的旁瓣电平,从而更有益于小目标的探测。
34、2、本发明对于广域稀布阵列的目标探测具有一定意义,特别是在多目标探测的情况下,布阵优化算法及波束形成算法对于广域稀布阵列方向图旁瓣的降低效果十分有限,而本发明方法通过迭代的方式依次消除大目标的旁瓣,从而能够更有效地降低大目标的高旁瓣对弱目标探测的不利影响。
技术特征:
1.一种广域稀布阵列弱小目标探测方法,其特征在于包括以下步骤:
技术总结
本发明公开了一种广域稀布阵列弱小目标探测方法,涉及雷达目标探测领域。该方法首先构建广域稀布阵列,并设置阈值;然后,进行广域稀布阵列多目标下的波束形成;其次,寻找方向图中最大目标;接着,多目标方向图函数减去最大目标的方向图函数;最后,根据阈值判断并决定是否重复前面两个步骤,直到找到所有目标。本发明能够在广域稀布阵列因阵元间距过大而产生高旁瓣的情况下,解决大目标高旁瓣淹没小目标的问题。
技术研发人员:夏双志,王鹏毅,李鑫宇
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!