一种基于离线路径库的路径规划方法
本发明属于自动驾驶路径规划,特别是涉及一种基于离线路径库的路径规划方法。
背景技术:
1、随着自动驾驶技术的发展,包括仓储、运输、环卫等领域在内的无人车应用得到快速普及,逐渐取代部分传统的人工方式,增加了效率的同时减少了用工成本,其中针对这些真实道路和低速行驶场景下的路径规划一直是研究的重点之一。
2、局部路径规划是在已知地图信息的环境下,在无人车起点与规划的终点之间,根据道路信息、障碍物位置和行驶状态规划出一条合适的路径。针对无人车的运动学或动力学特性、所处的地形环境以及所执行的任务不同,局部路径的指标也有所不同,局部路径的评估一般包括最短路径、最短时间、路径平滑度等指标,选择合适的评估标准可以有效的提升局部路径的质量。
3、一些常见的路径规划算法,例如lattice planner、a*等,可以针对合适的场景,在满足约束的情况下,规划出具有针对性的、精确的、可自主避障的局部路径,但是部分的规划算法需要按照规划频率进行在线优化,这些方法往往无法满足实时性要求,而另一些算法则由于所生成路径有折线段构成,导致曲率在折线处发生突变,无法满足规划路径的连续性以及无人车行驶的安全性。此外,一些离线路径库的规划方法使用地图所提供的信息进行路径规划,但这些方法往往依赖于地图的构建,且无法有效应对局部的动态场景。
4、针对这些问题,亟需提出一种基于离线路径库的路径规划方法,提升路径规划的实时性、路径的平滑性与行驶的安全性,减少计算成本,实现快速有效的、可自主避障的局部路径规划。
技术实现思路
1、本发明的目的是提供一种基于离线路径库的路径规划方法,通过对无人车在真实道路和低速行驶应用场景的分析,结合阿克曼底盘无人车的外型参数和运动学特性,设计了更快速和更准确的局部路径规划方法;通过基于离线路径库生成和路径平滑的方法,再剔除冲突路径,最后利用代价函数获得最优路径,实现局部路径规划,以解决上述现有技术存在的问题。
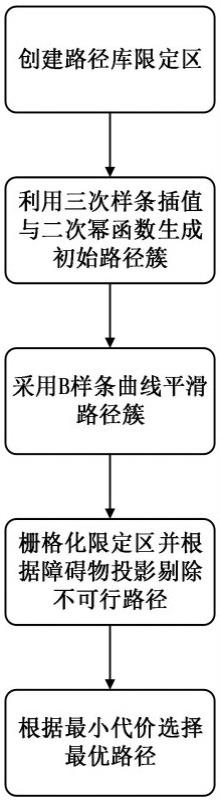
2、为实现上述目的,本发明提供了一种基于离线路径库的路径规划方法,包括以下步骤:
3、获取车体的近端限定区域和远端限定区域,组成路径库限定区域并进行栅格化处理;
4、获取所述路径库限定区域的初始路径簇并进行平滑处理;
5、将平滑后的路径簇和障碍物投影至所述路径库限定区域的栅格上,剔除障碍物占据的路径;
6、以行驶效率、道路可行性和行驶平滑性为约束,获取栅格上剩余路径的代价并排序,将代价最小的路径作为最优路径。
7、可选地,获取车体的近端限定区域和远端限定区域的过程包括:基于最小转弯半径和无人车轴距,获的限定区域的宽度;基于最小转弯半径和以最小转弯半径为半径所作扇形的角度,获得近端限定区域的底边长度;基于所述限定区域的宽度和无人车最大转弯角度,获得近端限定区域的长度;基于总规划长度和所述近端限定区域的长度,获得远端限定区域的长度,进而获得近端限定区域和远端限定区域。
8、可选地,获取所述路径库限定区域的初始路径簇的过程包括:在近端限定区域基于三次样条插值生成规划路径,并通过无人车最小转弯半径生成极限转向路径;在远端限定区域以所述规划路径末点为新起点,基于二次幂函数生成感知路径;基于所述规划路径、极限转向路径以及感知路径,获得初始路径簇。
9、可选地,在近端限定区域生成规划路径的过程包括:在近端限定区域使用极坐标表示路径信息,获得极坐标下的规划路径,采用三次样条插值拟合出所述极坐标下的规划路径的极角与极径的变化关系,并将极坐标转换成直角坐标,进而获得直角坐标下的规划路径。
10、可选地,对初始路径簇进行平滑处理的过程包括:在近端限定区域的规划路径末端与远端限定区域的感知路径始端分别选取若干控制点组成控制点集合,进而以规划路径和感知路径的连接处为中点,向前和向后选择所述控制点集合中预设数量的控制点,基于三次准均匀b样条曲线对所述规划路径和感知路径的连接处进行平滑处理。
11、可选地,剔除障碍物占据的路径的过程包括:将所述路径库限定区域分割成等大的栅格,并对每个栅格进行编号,将平滑后的路径簇和障碍物投影至栅格上后,对平滑后的路径簇所处的栅格以及障碍物占据的栅格进行对比,并通过编号检索出障碍物对应的栅格,进而剔除被障碍物占据的路径。
12、可选地,获取栅格上剩余路径的代价的过程包括:基于规划平滑性约束及其对应的权重、远端路径的参考线距离约束及其对应的权重和远端路径的道路边界约束及其对应的权重,构建代价函数,并基于所述代价函数获取栅格上剩余路径的代价。
13、可选地,获取所述规划平滑性约束、远端路径的参考线距离约束和远端路径的道路边界约束的过程包括:基于当前时刻的每条近端路径采样点与参考线横向误差以及上一时刻所选最优近端路径与参考线的横向误差,获得所述规划平滑性约束;基于各远端路径组采样点对于参考线的横向误差,获得参考线距离约束;基于各路径超出道路范围的采样点个数,获得远端路径的道路边界约束。
14、本发明的技术效果为:
15、1.本发明基于无人车的外型参数和运动学特性,设计了离线路径库限定区域建立的方法和离线路径簇生成的方法,快速地为无人车提供符合运动学约束的路径簇,提高路径规划的实时性,减少无人车计算成本。
16、2.本发明针对不同路径间生成方式不同所导致的路径连接处的不平滑问题,采用b样条曲线对初始路径进行平滑处理,消除了初始路径簇的不连续性。
17、3.本发明设计了基于行驶效率、道路可行性、行驶平滑性的代价函数,在快速获取可行路径簇的前提下,针对无人车当前的姿态和道路状况,为无人车选择更准确的规划路径。
技术特征:
1.一种基于离线路径库的路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于离线路径库的路径规划方法,其特征在于,
3.根据权利要求1所述的基于离线路径库的路径规划方法,其特征在于,
4.根据权利要求3所述的基于离线路径库的路径规划方法,其特征在于,
5.根据权利要求3所述的基于离线路径库的路径规划方法,其特征在于,
6.根据权利要求1所述的基于离线路径库的路径规划方法,其特征在于,
7.根据权利要求1所述的基于离线路径库的路径规划方法,其特征在于,
8.根据权利要求7所述的基于离线路径库的路径规划方法,其特征在于,
技术总结
本发明公开了一种基于离线路径库的路径规划方法,属于自动驾驶路径规划技术领域,包括以下步骤:获取车体的近端限定区域和远端限定区域,组成路径库限定区域并进行栅格化处理;获取所述路径库限定区域的初始路径簇并进行平滑处理;将平滑后的路径簇和障碍物投影至所述路径库限定区域的栅格上,剔除障碍物占据的路径;以行驶效率、道路可行性和行驶平滑性为约束,获取栅格上剩余路径的代价并排序,将代价最小的路径作为最优路径。本发明基于无人车的外型参数和运动学特性,设计了离线路径库限定区域建立的方法和离线路径簇生成的方法,快速地为无人车提供符合运动学约束的路径簇,提高路径规划的实时性,减少无人车计算成本。
技术研发人员:刘建圻,郭俊丰,曹磊,陈泽彬
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!