一种道路交通安全隐患的高精度定位方法与流程
本发明涉及交通安全评估,特别涉及道路交通安全隐患改善评价方法及系统。
背景技术:
1、
2、目前,对道路上可能发生的交通安全隐患大多都是基于相关规范、驾驶舒适性、公路运行环境展开,且简单的在一些事故发生点做一些警醒标志,一旦驾驶员未注意到依旧会发生严重的交通事故,现阶段,尚没有一种实时有效的道路交通安全隐患预测系统,不能及时发现公路存在的安全隐患,这也使一些先进的公路安全评价技术难以应用到工程实践中,从而导致对公路上不同车辆的交通安全预警效果不佳;因此,本发明提供了一种道路交通安全隐患的预测方法及系统,用以通过构建的道路交通安全隐患预测模型对途径车辆的驾驶特征参数进行分析,实现对途径车辆的交通安全隐患概率进行准确预测,从而便于提前对驾驶员进行预警,提高了排除交通安全隐患的可靠性和准确性,确保驾驶员的行车安全。
技术实现思路
1、本发明提供一种道路交通安全隐患的高精度定位方法,用以解决驾驶员遇到安全隐患的情况。
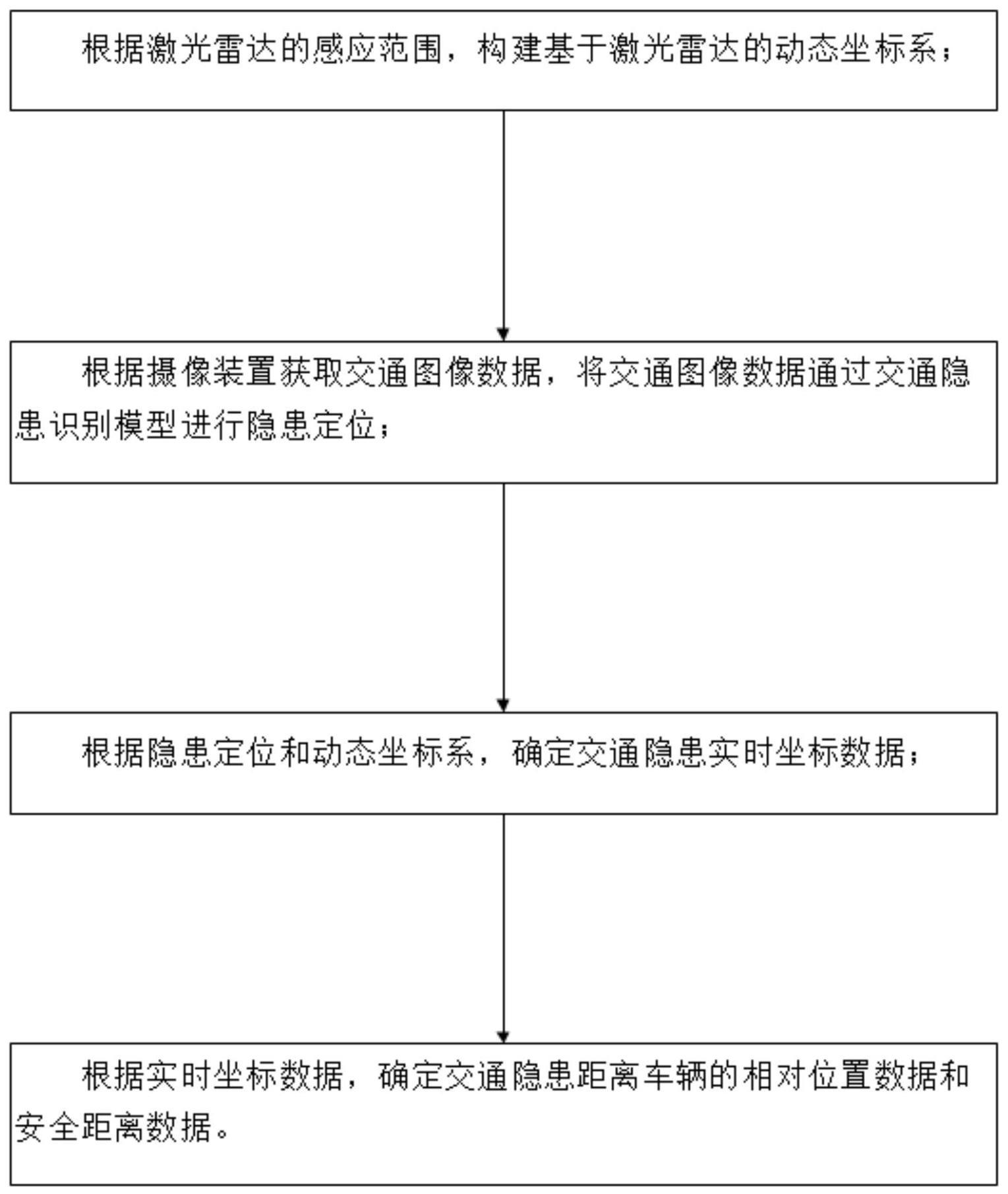
2、本发明提出一种道路交通安全隐患的高精度定位方法,包括:
3、根据激光雷达的感应范围,构建基于激光雷达的动态坐标系;
4、根据摄像装置获取交通图像数据,将交通图像数据通过交通隐患识别模型进行隐患定位;
5、根据隐患定位和动态坐标系,确定交通隐患实时坐标数据;
6、根据实时坐标数据,确定交通隐患距离车辆的相对位置数据和安全距离数据。
7、优选的,所述动态坐标系包括:
8、预先设定车辆的几何参数,确定车辆的几何端点;
9、根据几何端点,分别构建车辆的几何坐标系;其中,
10、几何坐标系包括:车辆左侧端点的第一坐标系集合、车辆右侧端点的第二坐标系集合、车辆前侧端点的第三坐标系集合和车辆后侧端点的第四坐标系集合;
11、获取车辆的卫星导航数据,确定车辆的交通线路;
12、将几何坐标系融合至交通线路,生成基于交通轨迹的动态几何坐标系;
13、通过动态几何坐标系,生成基于几何端点的动态坐标系集合;
14、用户和动态坐标系集合,进行激光雷达数据的实时更新。
15、优选的,所述方法还包括:
16、根据激光雷达的感应范围,对激光雷达的感应精度进行分环,生成多个环形感应区域;其中,
17、每个环形感应区域对应激光雷达的一个感应精度;
18、根据感应精度,确定低于预设感应精度的偏差环形感应区域;
19、根据偏差环形感应区域,设置超声波辅助测量感应装置;
20、根据超声波辅助测量感应装置,对偏差环形感应区域的障碍物数据进行同步感应;
21、根据同步感应,进行感应补偿。
22、优选的,所述交通图像数据包括:
23、获取摄像装置采集得到的多幅交通图像、惯性测量组件测量得到的惯导数据以及定位系统获得的定位数据,其中,
24、摄像装置、惯性测量组件和定位系统装载在同一交通图像采集车辆上;
25、基于交通图像、惯导数据以及定位数据,确定交通图像采集车辆的行进速度是否低于预设速度阈值;
26、若确定交通图像采集车辆的行进速度低于预设速度阈值,则将交通图像作为无效数据;
27、若确定交通图像采集车辆的行进速度高于预设速度阈值,则将交通图像作为有效数据。
28、优选的,所述交通隐患识别模型包括基于天气的气象隐患模型、基于车流量的流量隐患模型、基于地理环境的地理隐患模型、基于障碍物的碰撞隐患模型、基于道路的道路隐患模型和基于导航信号的通信隐患模型;其中,
29、气象隐患模型用于确定在不同天气环境下,确定车辆的驾驶隐患;
30、流量隐患模型用于在不同车流量密度场景下,确定车辆的事故隐患;
31、地理隐患模型用于在不同地理环境下,确定车辆的行驶隐患;
32、碰撞隐患模型用于在不同障碍物的情况下,确定车辆的碰撞隐患;
33、道路隐患模型用于在不同道路条件下,确定车辆的行驶速度隐患;
34、通信隐患模型用于在不同通信条件和通信强度下,确定车辆的通信隐患。
35、优选的,所述方法还包括:
36、接收摄像装置的交通图像数据,并分别输入对应的交通隐患识别模型;
37、从多个交通图像中确定与目标交通隐患识别模型对应的目标隐患因子;其中,
38、每一交通图像中存储有与交通隐患对应的隐患对比基准特征;
39、利用交通图像与交通隐患模型中的至少一个隐患对比基准特征进行比对,得到至少一个目标比对结果;
40、根据至少一个目标比对结果确定目标识别结果,确定交通隐患的隐患定位数据。
41、优选的,所述根据隐患定位和动态坐标系,确定交通隐患实时坐标数据包括:
42、根据隐患定位数据,通过激光雷达确定对应的位置在动态坐标系上的坐标数据;
43、计算坐标数据中每个坐标点位的法向量,设置隐患位置的坐标测量网格;
44、通过坐标测量网格,对车辆每一侧的坐标点位和法向量进行聚类,生成聚类簇;
45、根据聚类簇,计算聚类簇的一致性;
46、根据聚类簇的一致性,生成车辆隐患定位位置的3d轮廓;
47、根据3d轮廓,确定交通隐患实时坐标数据。
48、优选的,所述相对位置数据包括:
49、根据交通隐患实时坐标数据,确定交通隐患位置相对于车辆不同端点的相对角度信息;
50、根据相对角度信息,确定交通隐患相对于车辆的方向角信息;
51、根据方向角信息,确定在交通图像中交通隐患相对应车辆的分布数据;
52、根据分布数据,在构建基于车辆为坐标原点的三维场景坐标系;
53、根据三维场景坐标系,标记不同交通隐患相对于车辆的相对位置信息,并进行相对位置建模。
54、优选的,所述安全距离数据包括:
55、获取交通隐患的不同端点相对于车辆的目标测距图像;
56、对目标测距图像中安全隐患位置分别设置第一测量点、第二测量点,并在目标测距图像中设置参考线;
57、由交通隐患的实际形状尺寸和其相对应的像素距离,制定图像中实际距离与其相对应像素距离的标定参数;
58、根据第一测量点、第二测量点的连线构成的测距线与参考线的夹角作为标定参数的选择依据,此时测距线像素距离与选择的标定参数的乘积为交通隐患的测量距离。
59、优选的,所述方法还包括:
60、获取激光雷达目标感应区域内的雷达感应数据,其中,
61、每个雷达感应数据对应摄像装置在对应的视角拍摄得到的画面,所述一组视频画面包括安全隐患在各个视角下的画面;
62、在安全隐患出现在一组视频画面中的多个视频画面的情况下,对多个视频画面中安全隐患的测距数据进行累计;
63、根据测距数据进行报警。
64、本发明有益效果在于:
65、本发明能够在车辆进行行驶的时候,基于实时检测和判断安全隐患,通过对安全隐患的判定,精确得对安全隐患得区域进行定位,通过对安全隐患定位,进而确定相对安全得位置和测距安全得位置,进而对用户进行精确的提醒。
66、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
67、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!