姿态修正方法、装置、计算机可读介质及电子设备与流程
本技术涉及计算机及通信,具体而言,涉及一种姿态修正方法、装置、计算机可读介质及电子设备。
背景技术:
1、姿态是惯性导航中的重要指标,如果姿态存在误差将直接影响比力加速度的分解,进而会引入速度误差,而速度误差会通过积分带来位置误差,所以要想获得精确的位置信息,姿态的准确是必不可少的。当卫星导航信号长时间失效不可用时,相关技术中并不会对姿态进行修正补偿,进而导致无法进行准确的导航指引。
技术实现思路
1、本技术的实施例提供了一种姿态修正方法、装置、计算机可读介质及电子设备,进而可以提升终端设备的定位位置准确性,便于为终端设备提供精确的导航指引。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
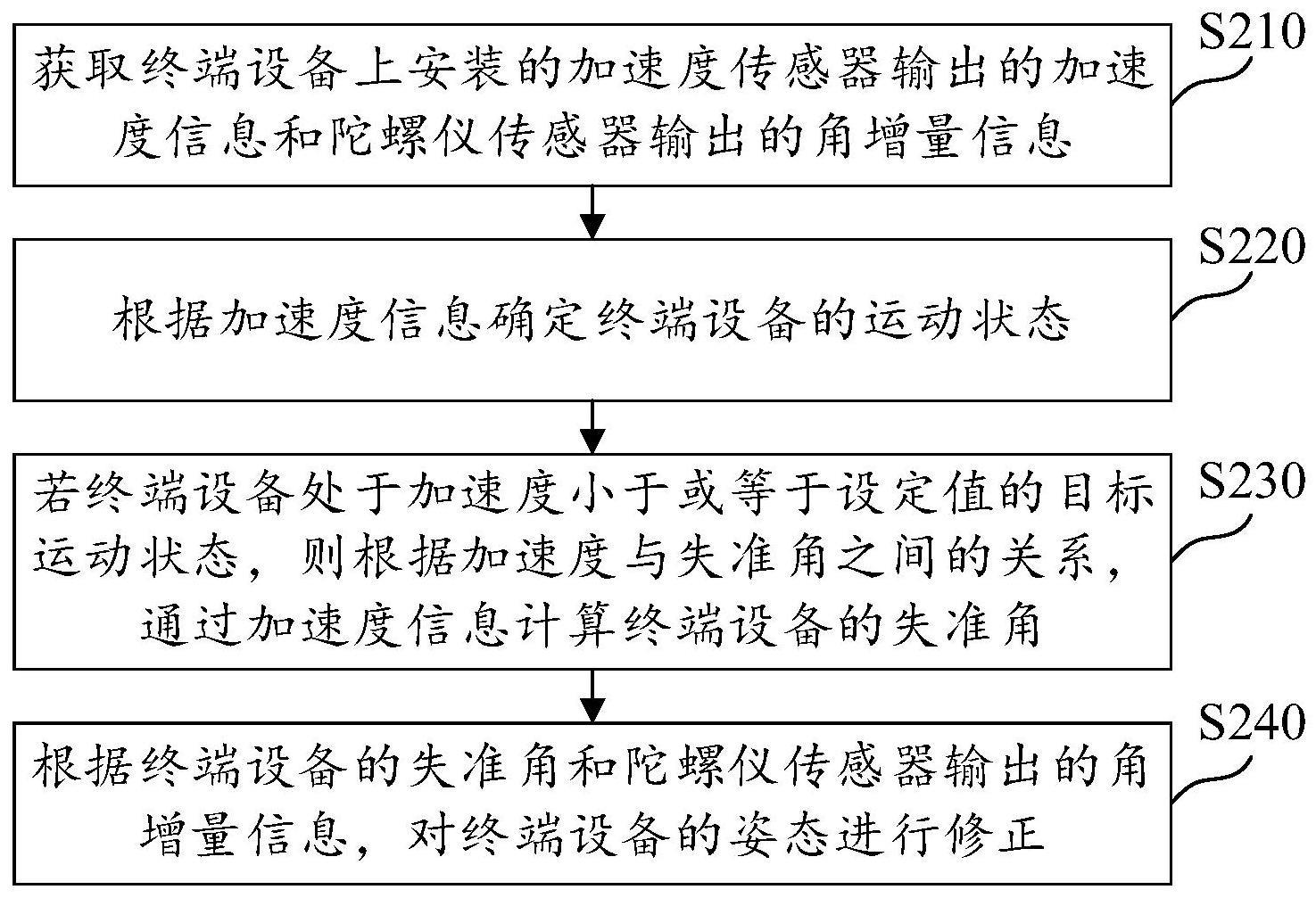
3、根据本技术实施例的一个方面,提供了一种姿态修正方法,包括:获取终端设备上安装的加速度传感器输出的加速度信息和陀螺仪传感器输出的角增量信息;根据所述加速度信息确定所述终端设备的运动状态;若所述终端设备处于加速度小于或等于设定值的目标运动状态,则根据加速度与失准角之间的关系,通过所述加速度信息计算所述终端设备的失准角;根据所述终端设备的失准角和所述陀螺仪传感器输出的角增量信息,对所述终端设备的姿态进行修正。
4、根据本技术实施例的一个方面,提供了一种姿态修正装置,包括:获取单元,配置为获取终端设备上安装的加速度传感器输出的加速度信息和陀螺仪传感器输出的角增量信息;确定单元,配置为根据所述加速度信息确定所述终端设备的运动状态;处理单元,配置为若所述终端设备处于加速度小于或等于设定值的目标运动状态,则根据加速度与失准角之间的关系,通过所述加速度信息计算所述终端设备的失准角;修正单元,配置为根据所述终端设备的失准角和所述陀螺仪传感器输出的角增量信息,对所述终端设备的姿态进行修正。
5、在本技术的一些实施例中,基于前述方案,所述确定单元配置为:根据所述加速度信息,计算所述终端设备的比力加速度的模值与重力加速度之间的差值;若所述差值的模值小于第一加速度阈值,则确定所述终端设备处于所述目标运动状态。
6、在本技术的一些实施例中,基于前述方案,所述确定单元配置为:根据所述加速度信息,计算所述终端设备的加速度传感器在设定时间段内输出的比力加速度的平均值;计算所述平均值的模值与所述重力加速度之间的差值。
7、在本技术的一些实施例中,基于前述方案,所述确定单元配置为:若所述差值的模值小于所述第一加速度阈值、且所述终端设备在水平方向上的比力加速度的模值小于第二加速度阈值,则确定所述终端设备处于所述目标运动状态。
8、在本技术的一些实施例中,基于前述方案,所述确定单元配置为:若所述终端设备在水平方向上的比力加速度的模值大于或等于所述第二加速度阈值的持续时间超过设定时长、且所述差值的模值小于所述第一加速度阈值,则确定所述终端设备处于所述目标运动状态。
9、在本技术的一些实施例中,基于前述方案,所述处理单元配置为:将惯导系统基本方程映射到所述目标运动状态所对应的运动环境中,得到惯导系统等效表达式;根据姿态误差对所述惯导系统等效表达式进行调整,得到失准角与包含误差的比力加速度之间的关系表达式;基于重力加速度与所述包含误差的比力加速度在所述运动环境中的关系,对所述关系表达式进行调整,得到所述加速度与失准角之间的关系。
10、在本技术的一些实施例中,基于前述方案,所述处理单元配置为:根据机体坐标系到导航坐标系的等效姿态旋转矩阵理论值与包含误差的等效姿态旋转矩阵之间的关系、导航坐标系下包含误差的比力加速度与机体坐标系下包含误差的比力加速度之间的关系,以及导航坐标系下包含误差的比力加速度与重力加速度之间的关系,对所述惯导系统等效表达式进行调整;其中,调整得到的失准角与包含误差的比力加速度之间的关系表达式为:其中,表示导航坐标系下包含误差的比力加速度的反对称矩阵;φ表示失准角;δ表示误差。
11、在本技术的一些实施例中,基于前述方案,所述处理单元配置为:基于重力加速度与导航坐标系下包含误差的比力加速度在所述运动环境中的关系,根据水平方向上的失准角的表示方式对所述关系表达式进行调整,得到水平方向上包含误差的比力加速度与水平方向上的失准角之间的关系;其中,所述重力加速度与导航坐标系下包含误差的比力加速度在所述运动环境中的关系为:gn表示导航坐标系下的重力加速度;g表示导航坐标系下的重力加速度的数值;所述调整得到的所述水平方向上包含误差的比力加速度与水平方向上的失准角之间的关系为:φh表示水平方向上的失准角;表示水平方向上包含误差的比力加速度。
12、在本技术的一些实施例中,基于前述方案,所述加速度与失准角之间的关系包括水平方向上包含误差的比力加速度与水平方向上的失准角之间的关系表达式;所述处理单元配置为:根据所述加速度信息对所述水平方向上包含误差的比力加速度与水平方向上的失准角之间的关系表达式进行求解,得到所述终端设备在水平方向上的失准角。
13、在本技术的一些实施例中,基于前述方案,所述加速度与失准角之间的关系包括水平方向上包含误差的比力加速度与水平方向上的失准角之间的关系表达式;所述处理单元配置为:根据水平方向上的失准角、水平方向上包含误差的加速度,以及所述陀螺仪传感器输出的漂移量,建立状态空间模型;基于所述加速度信息,通过卡尔曼滤波估计算法求解所述状态空间模型,得到所述终端设备在水平方向上的失准角。
14、在本技术的一些实施例中,基于前述方案,所述修正单元配置为:根据所述终端设备的失准角、所述陀螺仪传感器在[tm-1,tm]内输出的角增量信息,以及所述终端设备在tm-1时刻的等效姿态旋转矩阵,计算所述终端设备在tm时刻的等效姿态旋转矩阵,其中,m大于或等于1;基于所述终端设备在tm时刻的等效姿态旋转矩阵,对所述终端设备在m时刻的姿态进行修正。
15、在本技术的一些实施例中,基于前述方案,所述修正单元配置为:根据所述陀螺仪传感器在[tm-1,tm]内输出的角增量信息和所述终端设备的失准角,计算所述终端设备经过失准角修正后的角增量;根据所述终端设备经过失准角修正后的角增量,计算所述终端设备在机体坐标系下从tm-1时刻到tm时刻的姿态四元数;根据所述终端设备在机体坐标系下从tm-1时刻到tm时刻的姿态四元数,以及所述终端设备在tm-1时刻从机体坐标系到导航坐标系下的姿态四元数,计算所述终端设备在tm时刻从机体坐标系到导航坐标系下的姿态四元数;基于所述终端设备在tm时刻从机体坐标系到导航坐标系下的姿态四元数,对所述终端设备在m时刻的姿态进行修正。
16、根据本技术实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的姿态修正方法。
17、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个计算机程序,当所述一个或多个计算机程序被所述一个或多个处理器执行时,使得所述电子设备实现如上述实施例中所述的姿态修正方法。
18、根据本技术实施例的一个方面,提供了一种计算机程序产品,该计算机程序产品包括计算机程序,该计算机程序存储在计算机可读存储介质中。电子设备的处理器从计算机可读存储介质读取并执行该计算机程序,使得该电子设备执行上述各种可选实施例中提供的姿态修正方法。
19、在本技术的一些实施例所提供的技术方案中,通过在确定终端设备处于加速度小于或等于设定值的目标运动状态时,根据加速度与失准角之间的关系,通过终端设备的加速度信息计算终端设备的失准角,然后根据终端设备的失准角和陀螺仪传感器输出的角增量信息,对终端设备的姿态进行修正,使得在终端设备处于暂时静止、匀速或低加速度运动等状态时,可以根据加速度传感器输出的加速度信息和陀螺仪传感器输出的角增量信息来对终端设备的姿态进行修正,保持终端设备系统姿态的稳定可用,进而可以提升终端设备的定位位置准确性,便于为终端设备提供精确的导航指引。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!