一种纺织品接触凉感性能检测装置及其检测方法与流程
本发明涉及纺织品凉感检测,尤其涉及一种纺织品接触凉感性能检测装置及其检测方法。
背景技术:
1、目前市场上已出现很多具有凉暖感的功能性纺织品,但国内外对织物的接触冷暖感尚未有公开的检验方法标准,虽然国家标准gb/t 11048—2008《纺织品生理舒适性温态条件下热阻和湿阻的测定》是评价纺织品舒适性的一种测试方法,其中热阻主要测试纺织品的保温性能,但该试验方法是测定经过较长时间后在稳定状态下通过试样的热流量情况。而织物的接触冷暖感与瞬态导热有关, 是皮肤与织物表面接触后极短时间内产生的热量峰值,反映了人体皮肤的冷暖感觉。
2、引起织物与皮肤接触冷暖感的根本原因是织物与皮肤间发生了热交换,使皮肤产生了一定的温度变化。这种温度变化将引起皮肤中感温神经末梢的兴奋而产生以电脉冲为形式的感觉信息,上述信息经脊髓神经加工和处理后输送到大脑,大脑对信息进行处理和判断,从而产生冷或暖的判断。
3、由于纺织品的瞬间接触凉感与瞬态导热有关, 是皮肤与织物表面接触后极短时间内产生的热量峰值,反映了人体皮肤的冷暖感觉。而现有技术中采用的热源板和面料接触来模拟人体皮肤接触面料的情况,而接触采用压力式瞬态凉感检测,并且热源板为规则的形状,都是整个测试面和纺织品的表面完全贴合,显然这不能模拟真实的人体皮肤与纺织品摩擦的微环境,也无法模拟神经加工输送处理热量的能力。
4、因此,有必要对现有技术中的纺织品接触凉感性能检测方法进行改进,以解决上述问题。
技术实现思路
1、本发明克服了现有技术的不足,提供一种纺织品接触凉感性能检测装置及其检测方法。
2、为达到上述目的,本发明采用的技术方案为:一种纺织品接触凉感性能检测方法,包括以下步骤:
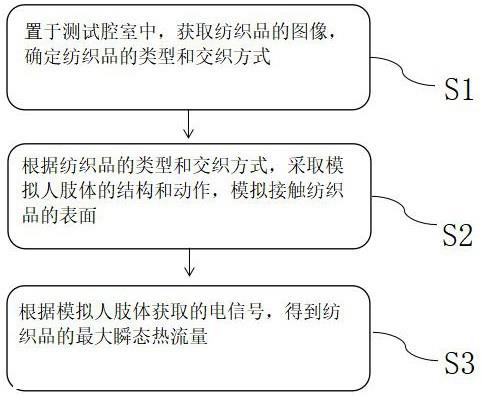
3、s1、将纺织品置于测试腔室中,获取纺织品的图像,确定纺织品的类型和交织方式;
4、s2、根据纺织品的类型和交织方式,采取模拟人肢体的结构和动作,模拟接触纺织品的表面;
5、s3、根据模拟人肢体获取的电信号,转化为热流信号,得到纺织品的最大瞬态热流量。
6、本发明一个较佳实施例中,纺织品图像的获取方式为:利用摄像机获取材料不同角度的图像;将获得的图像通过图像采集卡传输至计算机,在经过灰度变换、图像分割和轮廓线条的提取的步骤后,可以获得纺织品表面的特征,将特征进行识别对比,根据特征确定纺织品的类型和交织方式,其中,特征包括:纤维横、纵向的尺寸变化、纤维的边界线尺寸。
7、本发明一个较佳实施例中,识别对比的方式为:获取不同纺织品的图像,形成数据集;将纺织品进行增强处理,得到增强图像数据;将增强图像数据导入至卷积神经网络中,通过不断更迭训练网络参数,形成训练后的神经网络;将神经网络获取的不同纺织品的特征数据,作为特征数据库。
8、本发明一个较佳实施例中,人肢体为仿真机械手,所述仿真机械手包括手掌、手指、手臂、连接件、手指驱动结构、手臂转动驱动结构和感测件;所述手指为纤维增强的弹性管状结构,中间有多个关节连接,用于模仿人体的关节结构;手指驱动结构的作用为模仿人手的手指弯曲、转动或舒展动作;手臂转动驱动结构用于驱动手臂和手掌的转动角度,并控制转动速度,使得仿真机械手的操作和控制指令信号保持一致;
9、其中,每套控制指令信号中储存有完整的手部动作的手指位置变化、动态运动对应的手指驱动结构的驱动信号。
10、本发明一个较佳实施例中,在所述仿真机械手表面喷涂二维石墨烯基弹性超薄膜,内部的石墨烯片层会相互堆叠形成动态网络,增加仿真机械手和纺织品的接触点位。
11、本发明一个较佳实施例中,检测前将纺织品置于温度20±2℃,相对湿度65±4%的环境中,并平衡24小时。
12、本发明一个较佳实施例中,控制信号的获取方式为:通过采取真实场景下测试人员在接触不同纺织品时的标准动作,并将标准动作以肌电信号的方式存储,并形成一套控制指令信号;其中,控制指令信号为仿真机械手按照肌电信号的初始动作,结合计算机视觉的辅助训练,得到的实际动作的对应指令信号。
13、本发明一个较佳实施例中,所述感测件包括:加热层、介质层和检测层;所述加热层为柔性材料和设置在所述柔性材料一侧的加热单元,加热单元用于每次测试前将仿真皮肤加热至恒温;所述介质层用于传导纺织品与仿真机械手之间的热量;所述检测层为若干热敏性电阻,或电容式触觉传感器。
14、本发明一个较佳实施例中,所述加热层、所述介质层和所述检测层的相邻层间紧密贴合,保证在外界力作用下相邻层间不发生滑移,形成一体式的柔性结构。
15、本发明一个较佳实施例中,由所述仿真机械手获得电信号,并获得最大瞬态热流量的方法为:由电信号转化为离散点进行曲线拟合热流曲线,取热流曲线的波峰值,即为该纺织品的最大瞬态热流量;曲线拟合的方式采用人工智能的深度学习模型和递归算法的神经网络结构实现。
16、本发明一个较佳实施例中,在s2中,沿着纤维热量传递沿纤维轴向传导的阻力最小的方向进行接触测试。
17、本发明一个较佳实施例中,交织方式包括:平纹、斜纹、平纹加筋或斜纹加筋。
18、本发明一个较佳实施例中,获取方式具体为:将纺织品置于基准板上,整理平整后,用压脚对试样施加压力,测量接触纺织品的压脚面积与基准板之间的距离,即为厚度值。
19、本发明一个较佳实施例中,真实场景下,获取测试人员接触纺织品的肌电信号的方法为:通过在测试人员的手指的指关节、手臂、手腕和手背处设置运动传感器,利用运动传感器与测试人员的皮肤接触,感测测试人员在手部运动时的肌肉运动,并形成肌电信号。
20、本发明一个较佳实施例中,仿真机械手基于计算机视觉进行辅助动作训练,通过计算机视觉获取真实场景下测试人员的手部动作,并对图像或视频进行解析,获得视觉获取角度、手部关键点的位置信息和深度信息;仿真机械手按照肌电信号完成初始动作,并形成图像或视频,并获取初始动作的视觉获取角度、手部关键点的位置信息和深度信息;计算真实手部关键点的位置相对于初始动作的角度偏差,以辅助仿真机械手根据所述角度偏差对任一运动动作进行训练,直至角度偏差接近于0。
21、本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
22、本发明中提供了一种纺织品接触凉感性能检测方法,通过设计模拟肢体和织物之间形成微气候环境,并结合纺织品的图像和交织方式,确定模拟肢体按照指定方向进行完整的手部动作的手指位置变化、动态运动,弥补了现有技术中同一压接和任意的接触方向带来的误差,实现高精度的纺织品动态最大瞬态凉感的测量。
23、本发明中利用对纺织品图像处理,获得纺织品表面的特征,将特征进行识别对比,根据特征确定纺织品的类型和交织方式,这使得能够快速定位纺织品的纤维走向,提高仿真机械手对于接触走向的把控和响应,提高最大瞬态凉感的测量的准确率和速率。
24、本发明中的仿真机械手中肌肉部分采用硅胶材料,而表面为了模拟人体组织的神经系统,采用在仿真机械手表面喷涂二维石墨烯基弹性超薄膜。这种薄膜内部的石墨烯片层会相互堆叠形成动态网络,通过不同程度滑移,灵敏地响应外界的刺激,类似于神经系统,实现了增加仿真机械手和纺织品的接触点位,提高瞬态热流量测量的响应率。
25、本发明中通过采取真实场景下测试人员在接触不同纺织品时的标准动作,并将标准动作以肌电信号的方式存储,并形成一套控制指令信号,结合计算机视觉进行辅助动作训练,以辅助仿真机械手根据所述角度偏差对任一运动动作进行训练,直至角度偏差接近于0,通过该指令可以优化仿真机械手在运动过程中的手指细节特征,使得与纺织品接触的点位更加精确。
26、由于纺织品的交织方式的不同,为了获得最大瞬态凉感,选择沿着纤维热量传递沿纤维轴向传导的阻力最小的方向进行接触测试。以平纹或斜纹的纺织品为例,只需测试人员沿着平纹或斜纹的纹理进行接触,仿真机械手模拟基础动作,按照平纹或斜纹的纹理进行接触即可实现最大瞬态凉感的测量。对于一些不规则的或具有曲面状纤维集合的纺织品,仍然按照大致纤维轴向为接触方向。织物组织为平纹或平纹加强筋时的接触凉感大于斜纹,因为平纹组织与皮肤的接触面积大于斜纹组织,与皮肤接触瞬间参与导热的纤维更多,传导的热流量更大。
27、本发明将纺织品置于一定的湿度和温度下一段时间,实现纺织品表层和内部的湿度和温度的平衡。在测试时,利用保温材料将纺织品包裹密封后转入测试腔室,消除由于空气的流动造成的传热,以保证纺织品温度和湿度不变。
- 还没有人留言评论。精彩留言会获得点赞!