基于代价敏感度加权的雷达单脉冲鉴角曲线拟合方法与流程
本发明涉及雷达单脉冲测角,特别涉及一种基于代价敏感度加权的雷达单脉冲鉴角曲线拟合方法。
背景技术:
1、单脉冲测角技术是目前相控阵雷达普遍采用的在线角度估计方法,其实现简单,性能可靠,在工程应用中备受青睐。鉴角曲线(又称s曲线或角敏曲线)是单脉冲测角的依据,一般在微波暗室等内场天线测试过程中获得,其精确性是决定单脉冲测角性能的关键。
2、鉴角曲线的常见应用方式有两种:其一是直接存储鉴角曲线,在雷达工作过程中以查表方式实现测角;其二是将鉴角曲线拟合为特定的函数,在设备中只需要存储少量的系数,即可通过公式计算完成在线角度估计。
3、前一种方式的优势在于节约计算资源,但由于不同工作频率、不同波位的鉴角曲线有所差异,其所需的存储量也相对较大;虽然如今部分系统在正弦空间进行角度划分并存储相应的鉴角曲线,从而使不同波位、甚至不同工作频率的鉴角曲线可以通过简单的映射获得,但即便只需要存储一条鉴角曲线,为保证其精细程度,仍然需要一定的存储空间。
4、后一种方式尽管节约了存储资源,但由于单脉冲测角需要在线完成,为避免耗费过多的计算资源,鉴角曲线拟合函数不能过于复杂;然而尽管波束指向附近的鉴角曲线近似呈线性,但实际应用(尤其对于搜索雷达等而言)中通常希望拟合的鉴角函数能够适用于更大的角度范围,此时,以最常见的三阶多项式拟合为例,扩大适用范围的代价是在一定程度上降低波束指向附近的拟合精度,这对于大部分雷达系统而言往往是很难接受的。
5、综上,现有的鉴角曲线拟合方法难以在拟合函数的低复杂度(决定了在线测角的实现复杂度)、波束指向附近的高精度、以及边缘角度处的保精度之间取得良好的平衡,从而无法满足多样化的应用场景和愈发苛刻的性能需求。
技术实现思路
1、本发明的目的在于克服单脉冲测角雷达的传统鉴角曲线拟合方法无法平衡波束指向附近和边缘角度上的拟合精度、以及测角过程计算复杂度的缺点,提供了一种基于代价敏感度加权的雷达单脉冲鉴角曲线拟合方法。该方法设计并引入了代价敏感度函数作为不同偏角上拟合误差代价函数的权重,基于加权最小二乘的思想实现鉴角曲线的多项式拟合,既可以通过调整代价敏感度函数的相关参数来灵活地优化不同偏角区域的拟合精度、避免主波束范围内测角性能的损失,还可以通过多波位测量和联合拟合来进一步改善拟合精度和可靠性;另外,根据鉴角曲线的形状特征,可以灵活地舍弃部分拟合项,在提高拟合性能的同时保持相当的运算量。所提方法的离线曲线拟合和在线角度估计步骤简单高效,节约计算和存储资源,且兼容一维线阵和二维平面阵列。
2、为了达到上述发明目的,解决其技术问题所采用的技术方案如下:
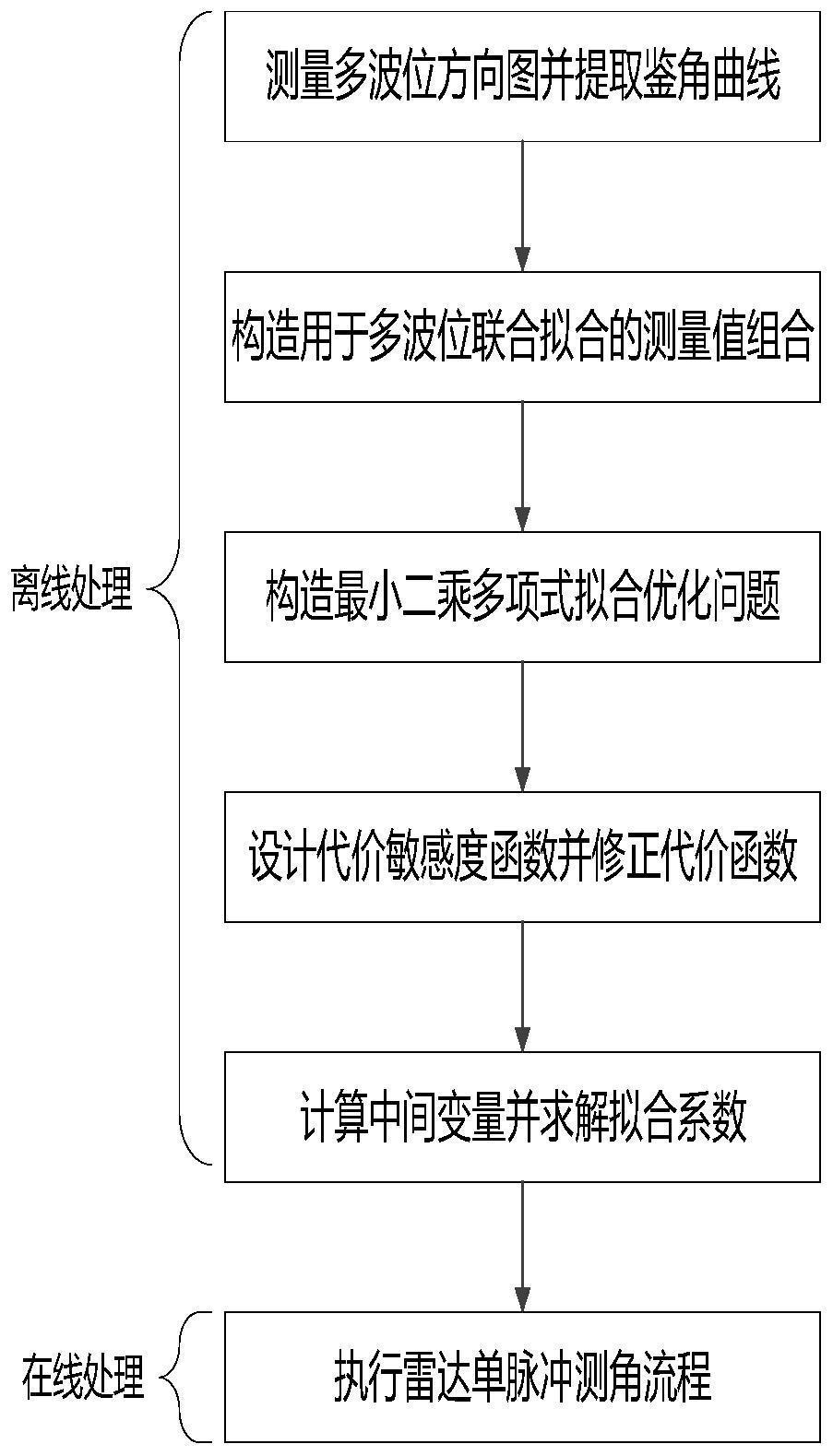
3、一种基于代价敏感度加权的雷达单脉冲鉴角曲线拟合方法,其具体步骤如下:
4、步骤1,在微波暗室或理想外场环境下测量多个波位的和差波束方向图,并提取感兴趣角度范围内的鉴角曲线原始测量值;
5、步骤2,构造用于鉴角函数多波位联合拟合的测量值组合;
6、步骤3,基于最小二乘准则构造多项式拟合优化问题;
7、步骤4,根据实际应用需求设计代价敏感度函数及相关参数,并进一步修正代价函数;
8、步骤5,计算中间变量并求解拟合系数;
9、步骤6,在雷达实际工作工程中,基于拟合获得的鉴角函数在线完成单脉冲测角。
10、进一步地,步骤1包括以下内容:
11、在微波暗室或者较为理想的外场环境下,测量指定工作频点、共m个波位的和波束与差波束方向图,取波束指向附近的差和比测量值构造鉴角曲线。记第m(m=1,2,...,m)个波位的指向角度为φm(注:φ=0对应阵列法向),该波位下的鉴角曲线在感兴趣的角度范围(例如,可取该波位下的3db波束宽度或者差波束的两个主峰之间)内共包含nm组有效测量值{φmn,rmn},其中φmn和rmn分别对应第n(n=1,2,...,nm)个测量角度及其对应的差和比测量值。
12、进一步地,步骤2包括以下内容:
13、为保证不同测量波位下的鉴角曲线可以近似采用同一组系数进行拟合,利用被测波位波束指向φm的余弦值对差和比rmn进行放缩(即),并利用其与偏离角δφmn=φmn-φm构成新的测量值组合若选择在正弦空间进行拟合,则应采用δφmn=sinφmn-sinφm构造新的测量值组合。
14、进一步地,步骤3包括以下内容:
15、为方便拟合并降低单脉冲测角实现的复杂度,采用l阶多项式函数对上述多波位的鉴角曲线进行统一拟合,最小二乘准则下曲线拟合对应的优化问题为
16、进一步地,步骤4包括以下内容:
17、考虑到跟踪雷达对于波束指向附近的测角精度要求更高,定义代价敏感度函数g(c)(-1≤c≤1)和归一化偏角值基于其构造权重wmn=g(cmn)并将上述优化问题的代价函数h修正为g(c)的一般性设计准则为:0≤g(c)≤1,g(c)=g(-c),g(c)∝1/|c|,g(0)=1且g′(0)=0。以上描述中,表示波位m的所有有效测量值δφmn中的最大值,符号“∝”表示“正比于”,g′(c0)表示函数g(c)在c=c0处的导数值。
18、具体地,这里给出两种典型的g(c)示例:g(c)=1-(1-t)·ea-a/|c|或g(c)=1-(1-t)·|c|a,其中,参数a(a>0)决定了权值w随归一化偏角绝对值|c|增大而减小的速度,参数t(0≤t≤1)对应权值w的最小容许值。
19、进一步地,步骤5包括以下内容:
20、基于步骤4中修正后的优化问题求解鉴角曲线拟合系数kl(l=0,1,...,l),系数向量的闭式表达式为[k0 k1 … kl-1 kl]t=u-1v,其中:上标“t”表示矩阵的转置操作,上标“-1”表示矩阵的求逆操作(鉴于u为对称矩阵,可以基于ldlt分解提高矩阵求逆的运算效率,这里不再赘述相关的计算方式),相关的变量具体表示如下:
21、
22、
23、
24、具体地,上式的原理在于,令代价函数对各阶系数的导数为零,有:
25、
26、整理后得:
27、
28、相应的矩阵形式为u·[k0 k1 … kl-1 kl]t=v,进而可得如上所述的系数向量闭式表达式。
29、另外,根据待拟合曲线的形状特征,若需要舍弃f(r)中的l阶项(例如,对于奇函数,可以舍弃其中的偶次方项),可以直接删除上述矩阵u中的第l+1行和第l+1列、以及向量v中的第l+1个元素。一般而言,鉴角曲线近似为奇函数,偶数阶项系数极小,且奇数阶项系数与工作频点呈近似线性关系,因此,在内场仅需测量部分频点的方向图和鉴角曲线,而未测量频点的鉴角曲线系数可以通过插值或进一步的函数拟合获得。
30、进一步地,步骤6包括以下内容:
31、基于步骤1至步骤5获得的拟合系数,鉴角曲线的近似函数为其中,δφ=φ-φ0为目标角度φ与波束指向角φ0之间的偏差,为放缩后的差和比。上述步骤基于微波暗室或较为理想的外场条件获得的量测数据即可离线完成,相应地,跟踪雷达在实际工作过程中的在线测角流程为:1)针对感兴趣的距离单元,提取和波束输出esum与差波束输出ediff(一般在脉冲压缩和目标检测之后完成),并计算差和比r=rori(ediff/esum),其中,操作符rori()表示取复数的实部或虚部(应根据天线阵列的加权方式具体选择);2)结合已知的波束指向φ0,对差和比进行放缩,即3)基于鉴角函数获得目标的角度估计值即需要注意的是,若选择在正弦空间进行拟合,本步骤中的δφ=φ-φ0、需要分别修改为δφ=sinφ-sinφ0、
32、本发明由于采用以上技术方案,使之与现有技术相比,具有以下的优点和积极效果:
33、(1)所提方法设计并引入了代价敏感度函数对鉴角曲线拟合的优化问题进行修正,用户通过简单的参数设置,即可根据实际应用需求灵活地调整对波束指向附近目标和偏离波束指向较远目标的拟合精度。
34、(2)所提方法采用多波位和差波束方向图和鉴角曲线测量结果对鉴角函数进行综合拟合,可以进一步降低拟合误差,提升雷达单脉冲测角精度。
35、(3)所提方法的角度估计实现简单高效,且无需存储各波位的鉴角曲线,节约计算资源和存储资源,便于工程应用。
36、(4)所提方法同时适用于任意排布的一维线阵和规则排布的二维平面阵列。
- 还没有人留言评论。精彩留言会获得点赞!