一种超视距雷达多目标跟踪方法、系统、电子设备及介质
本发明涉及多目标跟踪领域,特别是涉及一种超视距雷达多目标跟踪方法、系统、电子设备及介质。
背景技术:
1、多目标跟踪技术是目标跟踪领域中的重点研究方向之一,已经在民用和军事领域得到了广泛应用。在存在杂波、目标消亡和目标新生的复杂跟踪场景中,多目标跟踪技术通过传感器的观测以及多目标的先验信息精确地对多目标状态进行估计,从而为后续的决策控制等任务提供必要信息,因此开展多目标跟踪方法研究很有必要。
2、在对于海上目标进行观测跟踪时,由于海上目标通常距离观测基站较远,因此一般使用超视距雷达进行观测跟踪。超视距雷达利用大气中的电离层反射获得目标观测,但是大气中存在多个高度不同的电离层,因此超视距雷达具有多个观测路径。这样就会出现同一目标对应多个来自不同观测路径量测的情况,同时超视距雷达的接收器会接收来自所有观测路径的量测,但是量测产生的观测路径是无法直接获得的。因此与单观测路径多目标跟踪仅仅需要解决“量测-目标”数据关联问题相比,多观测路径多目标跟踪需要解决“量测-观测模型-目标”三维数据关联问题。实现最优“量测-观测模型-目标”三维数据关联会造成巨大的计算负担,而且计算负担随着观测模型数目、目标数目和杂波数目的增长呈类指数增长趋势,在实际应用中很难实现,因此开展计算复杂度较低的多观测路径多目标跟踪方法研究具有重要的理论价值和实际工程应用价值。
3、现在常用的多目标跟踪方法主要包括数据关联和随机有限集两种,其中基于随机有限集方法是一种基于概率的方法,相比于需要进行复杂数据关联计算的数据关联方法可以有效减少计算量,因此成为了多目标跟踪领域的研究热点。但是基于随机有限集的多目标跟踪方法是针对于单观测路径场景提出的,仅仅可以解决“量测-目标”数据关联,并不适用于多探测路径情况。
4、基于上述问题,亟需一种能够适用于多探测路径场景下的多目标跟踪方法。
技术实现思路
1、本发明的目的是提供一种超视距雷达多目标跟踪方法、系统、电子设备及介质,可实现密集杂波下多观测路径多目标跟踪,并减轻计算负担。
2、为实现上述目的,本发明提供了如下方案:
3、一种超视距雷达多目标跟踪方法,包括:
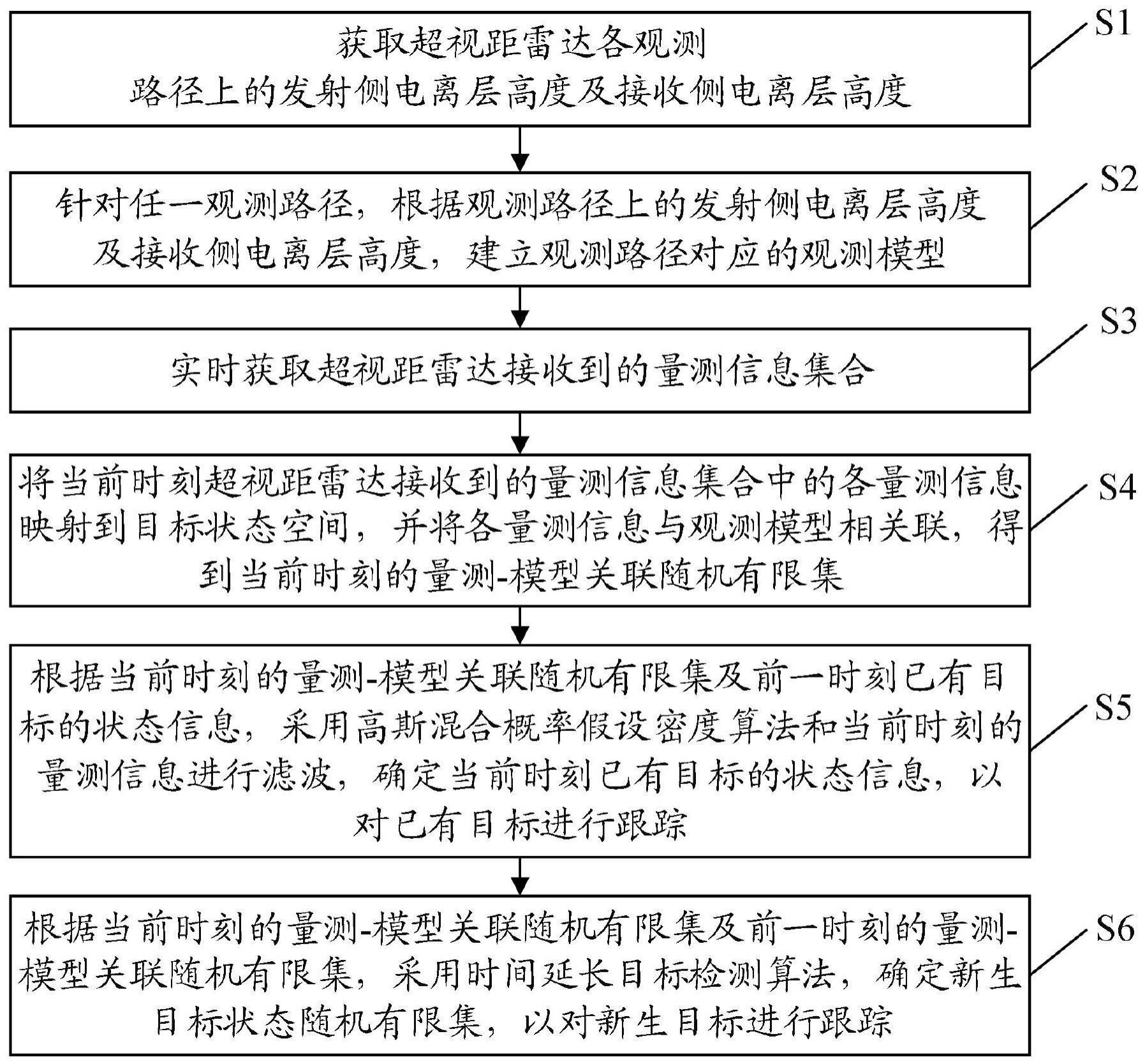
4、获取超视距雷达各观测路径上的发射侧电离层高度及接收侧电离层高度;
5、针对任一观测路径,根据所述观测路径上的发射侧电离层高度及接收侧电离层高度,建立所述观测路径对应的观测模型;
6、实时获取超视距雷达接收到的量测信息集合;所述量测信息集合中多个量测信息;
7、将当前时刻超视距雷达接收到的量测信息集合中的各量测信息映射到目标状态空间,并将各量测信息与观测模型相关联,得到当前时刻的量测-模型关联随机有限集;所述量测-模型关联随机有限集中包括各量测信息及各量测信息对应的观测模型;
8、根据当前时刻的量测-模型关联随机有限集及前一时刻已有目标的状态信息,采用高斯混合概率假设密度算法和当前时刻的量测信息进行滤波,确定当前时刻已有目标的状态信息,以对已有目标进行跟踪;
9、根据当前时刻的量测-模型关联随机有限集及前一时刻的量测-模型关联随机有限集,采用时间延长目标检测算法,确定新生目标状态随机有限集,以对新生目标进行跟踪;新生目标在下一时刻为已有目标。
10、可选地,观测模型为:
11、
12、其中,为第j个观测路径的观测向量,为第j个观测路径对应的观测模型的观测方程,xt为t时刻的目标状态向量,为第j个观测路径对应的观测模型的观测噪声,ω为观测路径的数量。
13、可选地,采用以下公式将量测信息映射到目标状态空间:
14、
15、其中,x为将量测信息映射到目标状态空间后的目标状态向量,l1为第一中间变量,l2为第二中间变量,l2=r-l1,r为观测路径距离的一半,ht为发射侧电离层高度,hr为接收侧电离层高度,d为超视距雷达的发射器与接收器之间的距离,为接收器到接收侧电离层的距离与y轴间的偏差角,ρ为目标距离坐标原点的距离,为目标距离坐标原点的距离ρ的变化速率,θ为目标偏离极坐标x轴的角度,为量测信息,为r的一阶导数。
16、可选地,t时刻的量测-模型关联随机有限集为:
17、
18、其中,zl,t为t时刻的量测-模型关联随机有限集,j=1,2,…,ω,为t时刻第j个观测路径观测模型对应的量测随机有限集,zi为第i个量测信息,zj,t为t时刻与第j个观测路径观测模型匹配的观测向量随机有限集,ω为观测路径的数量。
19、可选地,根据当前时刻的量测-模型关联随机有限集及前一时刻已有目标的状态信息,采用高斯混合概率假设密度算法和当前时刻的量测信息进行滤波,确定当前时刻已有目标的状态信息,具体包括:
20、根据前一时刻已有目标的状态信息,采用高斯混合概率假设密度算法的预测步对当前时刻已有目标和新生目标的状态信息进行预测,得到当前时刻目标的预测状态;
21、根据当前时刻的量测-模型关联随机有限集,采用高斯混合概率假设密度算法的更新步对当前时刻目标的预测状态进行修正,得到当前时刻已有目标的状态信息。
22、可选地,根据当前时刻的量测-模型关联随机有限集及前一时刻的量测-模型关联随机有限集,采用时间延长目标检测算法,确定新生目标状态随机有限集,具体包括:
23、将当前时刻的量测-模型关联随机有限集中的量测信息映射到目标状态空间,得到当前时刻中间变量;
24、根据所述当前时刻中间变量确定当前时刻疑似新生目标有限集;
25、将前一时刻的量测-模型关联随机有限集中的量测信息映射到目标状态空间,得到前一时刻中间变量;
26、根据所述前一时刻中间变量确定前一时刻疑似新生目标有限集;
27、根据所述当前时刻疑似新生目标有限集及所述前一时刻疑似新生目标有限集,确定新生目标状态随机有限集。
28、可选地,采用以下公式,确定t时刻的新生目标状态随机有限集:
29、xb,t'={xb,t|if||xb,t-ft(xb,t-1)||<δ,xb,t∈xb,t,xb,t-1∈xb,t-1};
30、其中,xb,t'为t时刻的新生目标状态随机有限集,xb,t为t时刻的新生目标状态向量,xb,t-1为t-1时刻的新生目标状态向量,ft()为目标运动方程,δ为预先设定的参数,xb,t为当前时刻疑似新生目标有限集,xb,t-1为前一时刻疑似新生目标有限集。
31、为实现上述目的,本发明还提供了如下方案:
32、一种超视距雷达多目标跟踪系统,包括:
33、高度获取单元,用于获取超视距雷达各观测路径上的发射侧电离层高度及接收侧电离层高度;
34、模型建立单元,与所述高度获取单元连接,用于针对任一观测路径,根据所述观测路径上的发射侧电离层高度及接收侧电离层高度,建立所述观测路径对应的观测模型;
35、量测获取单元,用于实时获取超视距雷达接收到的量测信息集合;所述量测信息集合中多个量测信息;
36、关联单元,分别与所述模型建立单元及所述量测获取单元连接,用于将当前时刻超视距雷达接收到的量测信息集合中的各量测信息映射到目标状态空间,并将各量测信息与观测模型相关联,得到当前时刻的量测-模型关联随机有限集;所述量测-模型关联随机有限集中包括各量测信息及各量测信息对应的观测模型;
37、第一跟踪单元,与所述关联单元连接,用于根据当前时刻的量测-模型关联随机有限集及前一时刻已有目标的状态信息,采用高斯混合概率假设密度算法和当前时刻的量测信息进行滤波,确定当前时刻已有目标的状态信息,以对已有目标进行跟踪;
38、第二跟踪单元,与所述关联单元连接,用于根据当前时刻的量测-模型关联随机有限集及前一时刻的量测-模型关联随机有限集,采用时间延长目标检测算法,确定新生目标状态随机有限集,以对新生目标进行跟踪;新生目标在下一时刻为已有目标。
39、为实现上述目的,本发明还提供了如下方案:
40、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的超视距雷达多目标跟踪方法。
41、为实现上述目的,本发明还提供了如下方案:
42、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的超视距雷达多目标跟踪方法。
43、根据本发明提供的具体实施例,本发明公开了以下技术效果:
44、本发明根据不同的发射侧电离层高度及接收侧电离层高度建立对应的多个观测模型,然后超视距雷达接收到的各量测信息映射到目标状态空间,并将各量测信息与观测模型相关联,得到当前时刻的量测-模型关联信息,将“量测-观测模型-目标”三维数据关联分解为“量测-观测模型”数据关联和“量测-目标”数据关联两个低维数据关联问题,降低了关联过程的计算复杂度,再根据当前时刻的量测-模型关联信息及前一时刻已有目标的状态向量,采用高斯混合概率假设密度算法,对当前时刻的量测信息进行滤波,确定当前时刻已有目标的状态向量,以对已有目标进行跟踪,最后根据当前时刻的量测-模型关联信息及前一时刻的量测-模型关联信息,采用时间延长目标检测算法,确定新生目标状态随机有限集,以对新生目标进行跟踪。最终实现了密集杂波下多观测路径多目标的跟踪,并减轻了计算负担。
- 还没有人留言评论。精彩留言会获得点赞!