一种激光雷达去噪方法、装置、车辆及存储介质与流程
本发明实施例涉及激光雷达,尤其涉及一种激光雷达去噪方法、装置、车辆及存储介质。
背景技术:
1、粉尘和水雾对于激光雷达点云数据产生的干扰是目前业界共同面对的难题,粉尘水雾的出现所带来的噪声会极大影响激光雷达对于障碍物的检测效果,往往会产生障碍物的误检。现有技术还无法解决通用场景下的粉尘水雾对障碍物检测的影响。因此针对车辆在运行的过程中,车轮或者作业模块扬起的粉尘或水雾引起的激光雷达误检的问题,急需一种解决方案。
技术实现思路
1、本发明提供了一种激光雷达去噪方法、装置、车辆及存储介质,以解决现有技术中由于存在粉尘和水雾而导致的激光雷达误检的问题。
2、根据本发明的一方面,提供了一种激光雷达去噪方法,所述方法包括:
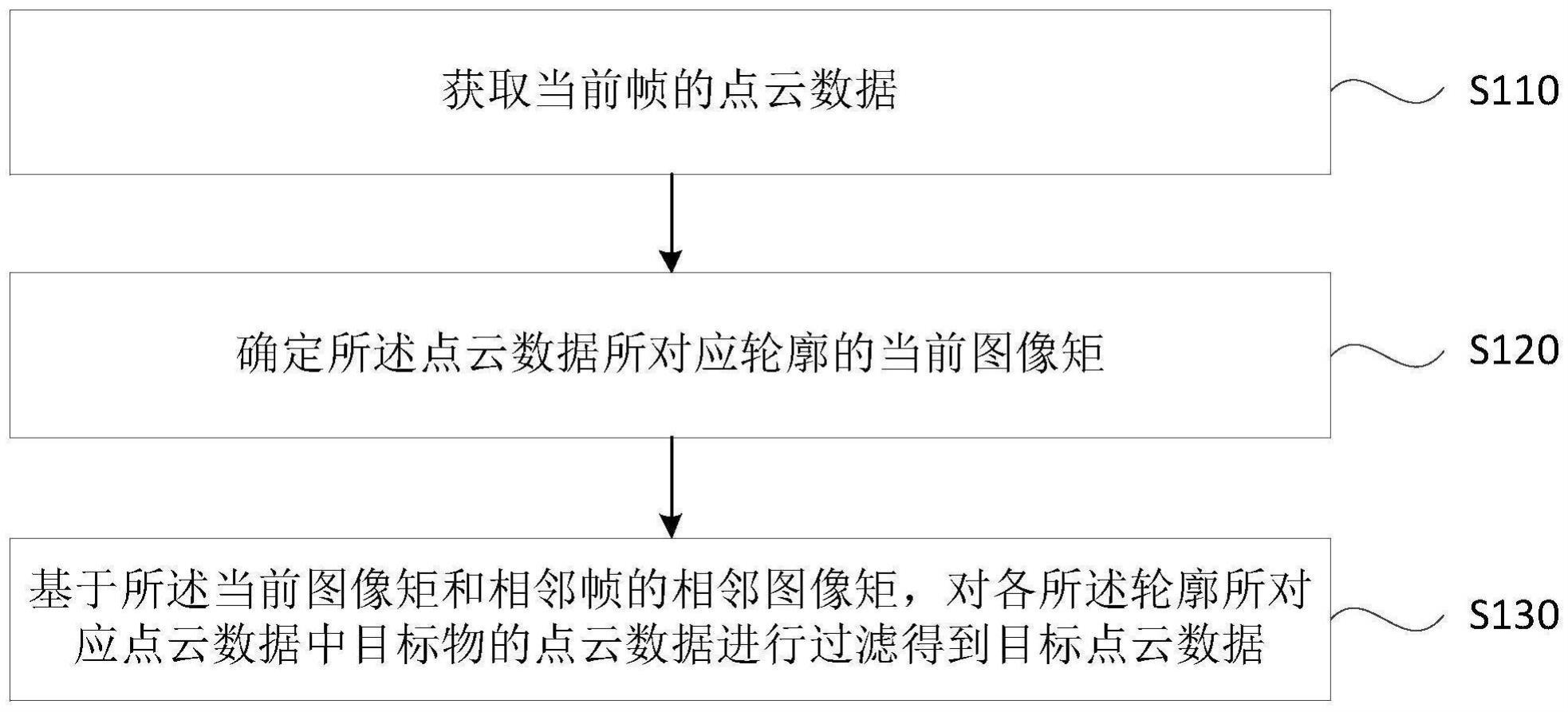
3、获取当前帧的点云数据;
4、确定所述点云数据所对应轮廓的当前图像矩;
5、基于所述当前图像矩和相邻帧的相邻图像矩,对各所述轮廓所对应点云数据中目标物的点云数据进行过滤得到目标点云数据,所述相邻帧包括所述当前帧的前一帧和所述当前帧的后一帧,所述目标物在不同帧间的形变大于设定形变阈值。
6、根据本发明的另一方面,提供了一种激光雷达去噪装置,所述装置包括:
7、获取模块,用于获取当前帧的点云数据;
8、确定模块,用于确定所述点云数据所对应轮廓的当前图像矩;
9、过滤模块,用于基于所述当前图像矩和相邻帧的相邻图像矩,对各所述轮廓所对应点云数据中目标物的点云数据进行过滤得到目标点云数据,所述相邻帧包括所述当前帧的前一帧和所述当前帧的后一帧,所述目标物在不同帧间的形变大于设定形变阈值。
10、根据本发明的另一方面,提供了一种车辆,所述车辆包括:
11、至少一个激光雷达;
12、至少一个处理器;以及
13、与所述至少一个处理器通信连接的存储器;所述至少一个激光雷达与所述至少一个处理器和所述存储器通信连接;其中
14、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的激光雷达去噪方法。
15、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的激光雷达去噪方法。
16、本发明实施例的一种激光雷达去噪方法、装置、车辆及存储介质,所述方法包括:获取当前帧的点云数据;确定所述点云数据所对应轮廓的当前图像矩;基于所述当前图像矩和相邻帧的相邻图像矩,对各所述轮廓所对应点云数据中目标物的点云数据进行过滤得到目标点云数据,所述相邻帧包括所述当前帧的前一帧和所述当前帧的后一帧,所述目标物在不同帧间的形变大于设定形变阈值。该方法通过对当前帧中形变大于设定形变阈值的目标物所对应的点云数据进行过滤,能够防止由于存在粉尘和水雾而导致的激光雷达误检的问题。
17、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种激光雷达去噪方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述点云数据所对应轮廓的图像矩,包括:
3.根据权利要求2所述的方法,其特征在于,所述对所述二值图像进行形态学操作,包括:
4.根据权利要求1所述的方法,其特征在于,所述当前图像矩包括当前质心位置,所述相邻图像矩包括相邻质心位置,相应的,所述基于所述当前图像矩和相邻帧的相邻图像矩,对各所述轮廓所对应点云数据中目标物的点云数据进行过滤,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述轮廓在所述当前帧中的当前质心位置和所述轮廓在所述相邻帧中的相邻质心位置,确定所述轮廓对应的物体是否为同一物体,包括:
6.根据权利要求4所述的方法,其特征在于,所述图像矩包括hu矩,所述相邻图像矩包括前一帧的hu矩、后一帧的hu矩;相应的,所述基于所述轮廓的形态变化信息,确定是否将所述轮廓所对应的点云数据作为目标物的点云数据,包括:
7.根据权利要求1所述的方法,其特征在于,所述获取当前帧的点云数据之后,还包括如下一个或多个:
8.一种激光雷达去噪装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,所述车辆包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的激光雷达去噪方法。
技术总结
本发明公开了一种激光雷达去噪方法、装置、车辆及存储介质。所述方法包括:获取当前帧的点云数据;确定所述点云数据所对应轮廓的当前图像矩;基于所述当前图像矩和相邻帧的相邻图像矩,对各所述轮廓所对应点云数据中目标物的点云数据进行过滤得到目标点云数据,所述相邻帧包括所述当前帧的前一帧和所述当前帧的后一帧,所述目标物在不同帧间的形变大于设定形变阈值。该方法通过对当前帧中形变大于设定形变阈值的目标物所对应的点云数据进行过滤,能够防止由于存在粉尘和水雾而导致的激光雷达误检的问题。
技术研发人员:许皓,贺武
受保护的技术使用者:深圳市德赛西威汽车电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!