一种高精度双路转动参数实时对比测量仪
本发明涉及工业自动化仪表,具体为一种高精度双路转动参数实时对比测量仪。
背景技术:
1、随着现代工业技术的快速发展,在航空、工业、机械制造领域等的高精度运动控制系统越来越多,对控制精度要求越来越高,对电机转速的高精度测量技术是十分重要的。目前高端伺服电机控制技术主要是国外一些大公司所掌握,在发展和研究国产高端伺服电机控制技术时需要进行对比测试,获取二者在实时动态特性、加速性能、速度稳定性、位置准确性等参数的差异,作为一个评价性能的手段,也为选取合适的伺服控制系统提供参考。但目前已经有的转速测试仪器一般都是单通道,而且功能不够完善。
技术实现思路
1、本发明的目的在于针对上述问题,提供一种高精度双路转动参数实时对比测量仪,以解决现有转速检测装置在检测通道数量、获得转动动态参数实时对比方面的不足。
2、本发明的目的是通过以下技术方案来实现:
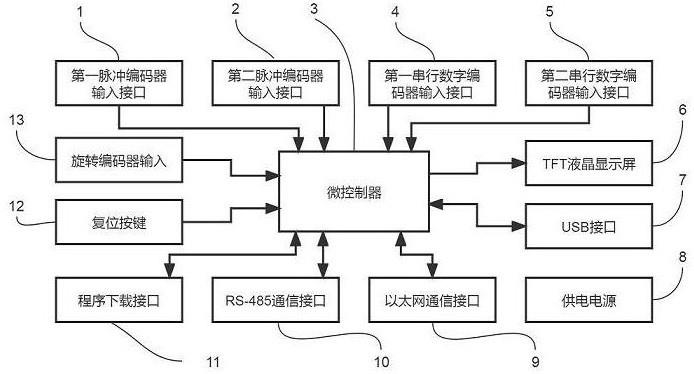
3、一种高精度双路转动参数实时对比测量仪,包括第一脉冲编码器输入接口电路1、第二脉冲编码器输入接口电路2、第一串行数字编码器输入接口电路4、第二串行数字编码器输入接口电路5、微控制器电路3、tft液晶显示屏电路6、usb接口电路7、供电电源电路8、以太网通信接口电路9、rs-485通信接口电路10、程序下载接口电路11、复位按键电路12和旋转编码器输入电路13。
4、其中第一脉冲编码器输入接口电路1通过p1和p2接线端连接外部的编码器模块电路,p2为脉冲编码器提供5v电源和gnd,p1为脉冲编码器a、b相信号输入接线端,并通过r1、r2连接到微控制器电路3的第一定时器的输入通道1和第一定时器的输入通道2的输入引脚。
5、其中第二脉冲编码器输入接口电路2通过p3和p4接线端连接外部的编码器模块电路,p3为脉冲编码器提供5v电源和gnd,p4为脉冲编码器a、b相信号输入接线端,并通过r4、r5连接到微控制器电路3的第二定时器的输入通道1和第二定时器的输入通道2的输入引脚。
6、其中第一串行数字编码器输入接口电路4通过p5和p6接线端连接外部的编码器模块电路,p5为第一串行数字编码器提供12v电源和gnd,p6是rs-485总线差分信号线a/b的接线端子,a/b信号通过电阻r6、r7连接u11的6,7引脚,u11的8引脚接+3.3v电源,u11的5引脚接gnd,u11的1引脚连接到微控制器电路3的第一异步串行通信接口的rx引脚,u11的4引脚连接到微控制器电路3的第一异步串行通信接口的tx引脚,u11的2、3引脚连接到微控制器电路3的第一个gpio引脚用于控制信号的传输方向,c19连接+3.3v电源与gnd,实现电路退耦功能。
7、其中第二串行数字编码器输入接口电路5通过p7和p8接线端连接外部的编码器模块电路,p8为第一串行数字编码器提供12v电源和gnd,p7是rs-485总线差分信号线a/b连接端子,a/b信号通过电阻r8、r9连接u8的6,7引脚,u8的8引脚接+3.3v电源,u8的5引脚接gnd,u8的1引脚连接到微控制器电路3的第二异步串行通信接口的rx引脚,u8的4引脚连接到微控制器电路3的第二异步串行通信接口的tx引脚,u8的2、3引脚连接到所述的微控制器电路3的第二个gpio引脚用于控制信号的传输方向,c20连接+3.3v电源与gnd,实现电路退耦功能。
8、其中tft液晶显示屏电路6通过h2连接外置的tft显示屏模块电路,h2的1引脚连接+3.3v电源,2引脚连接gnd,3-14引脚连接到微控制器电路3的spi功能引脚和gpio引脚。
9、其中usb接口电路7通过usb1连接u盘,usb1的4、5、6脚连接gnd,usb1的1脚连接5v电源,usb1的2脚连接r28,再连接微控制器电路3的usb功能的usb_n引脚,usb1的3脚连接r29,再连接微控制器电路3的usb功能的usb_p引脚。
10、其中供电电源电路8通过dc1连接由市电供电的12v直流电源,dc1的1脚连接12v电源,dc1的2、3脚连接gnd,dc1的1脚连接c1、c2、c3的正极引脚,dc1的2、3脚连接c1、c2、c3的负极引脚,dc1的1脚连接c4、c5、c9的一只引脚,dc1的2、3脚连接c4、c5的另一只引脚,c9的另一只脚连接u1的5脚和r13的一只引脚,r13的另一只引脚连接r3的一只引脚和gnd,r3的另一只引脚连接u1的4脚和r12的一只引脚、c8的一只引脚,r12的另一只引脚连接5v电源,c8并联在r12两端,d1的阳极连接gnd,d1的阴极连接u2的一端和u1的2脚,u2的另一端连接5v电源,u1的1脚连接12v电源、u1的3、6脚连接gnd,c6和c7连接5v电源和gnd之间,u10的3脚连接5v、u10的1脚连接gnd、u10的2脚连接+3.3v,c22、c23连接在+3.3v与gnd之间,u3的3脚连接5v、u3的1脚连接gnd、u3的2脚连接第二路+3.3v,c10、c11连接在+3.3v与gnd之间。
11、其中以太网通信接口电路9通过u5连接连接远程计算机,u5的6脚串连接r16,再连接到微控制器电路3的以太网功能引脚etx_n引脚,u5的3脚串联连接r17,再连接到所述的微控制器3的以太网功能引脚etx_p引脚,u5的2脚串联连接r18,再连接到微控制器电路3的以太网功能引脚erx_n引脚,u5的1脚串联连接r19,再连接到微控制器电路3的以太网功能引脚erx_p引脚,u5的4、5脚连接+3.3v电源,u5的9脚串联连接r20,再连接到+3.3v电源,u5的12脚串联连接r21,再连接到+3.3v电源,u5的10脚连接到微控制器电路3的第四个gpio引脚,u5的11脚连接到微控制器3的第五个gpio引脚。
12、其中rs-485通信接口电路10通过p10接线端连接远程计算机,p10是rs-485总线差分信号线a/b连接端子,a/b信号通过电阻r10、r11连接u9的6,7引脚,u9的8引脚接+3.3v电源,u9的5引脚接gnd,u9的1引脚连接到微控制器电路3的第二异步串行通信接口的rx引脚,u9的4引脚连接到微控制器电路3的第二异步串行通信接口的tx引脚,u9的2、3引脚连接到微控制器电路3的第三个gpio引脚用于控制信号的传输方向,c21连接+3.3v电源与gnd,实现电路退耦;u7的1脚连接d2的一只阳极引脚,u7的2脚连接gnd,d2的公共阴极连接微控制器电路3的vbat引脚,d2的公共阴极串联连接c18到gnd,d2的另一只阳极引脚连接+3.3v电源。
13、其中程序下载接口11通过p11连接上位机下载器,p11的1、2引脚连接5v电源,p11的3、4引脚连接+3.3v电源,p11的5、6引脚连接gnd,p11的7引脚串联连接r27、再连接微控制器电路3的调试功能swdio引脚,p11的9引脚串联连接r26、再连接微控制器电路3的调试功能swclk引脚,p11的7引脚串联连接r31、再连接到+3.3v电源,p11的9引脚串联连接r32、再连接到+3.3v电源,p11的8引脚连接微控制器电路3第四异步串行功能的pa10引脚,p11的10引脚连接微控制器电路3第四异步串行功能的pa9引脚。
14、其中复位按键12由sw1、c12和r14组成,sw1的1、2引脚连接微控制器电路3的复位引脚,sw1的1、2引脚串联连接r14到+3.3v电源,sw1的1、2引脚串联连接c12到gnd,sw1的3、4引脚连接gnd。
15、其中旋转编码器输入电路13由u4和r15组成,u4的4、6、7脚连接gnd,u4的2脚串联连接r15到gnd,u4的1、3、5脚连接微控制器电路3的三只gpio引脚。
16、其中微控制器电路3由u6及其晶振电路、电源电路组成,微控制器电路3通过其内部功能模块对外引出的引脚连接到上述的各个模块的引脚,微控制器电路3的vss_1、vss_2、vss_3、vss_4、vss_5、vssa、vref-连接gnd,微控制器电路3的vio_1、vdd_2、vio_3、vdd_4、vdd_5、vdda、vref+连接+3.3v,晶振x2的1脚不连接,晶振x2的2脚连接gnd,晶振x2的3脚连接微控制器电路3的osc_in引脚,晶振x2的4脚串联连接l2到+3.3v,晶振x2的4脚串联连接c14到gnd,c15与c14关联连接,+3.3v连接led1、led2、led3的阳极,led1的阴极串联连接r22到控制器电路3的pd7脚,led2的阴极串联连接r23到微控制器电路3的pd6脚,led3的阴极串联连接r24到gnd,h3的1脚连接+3.3v,h3的2脚串联连接r30到微控制器电路3的boot1脚,h3的3脚连接gnd,h4的1脚连接+3.3v,h4的2脚串联连接r25到微控制器电路3的boot0脚,h4的3脚连接gnd,c24-c32并联连接在+3.3v与gnd之间。
17、进一步的,微控制器电路3的第一定时器输入通道1的输入引脚是u6的pa0引脚、第一定时器的输入通道2的输入引脚是u6的pa1引脚。
18、进一步的,微控制器电路3的第二定时器输入通道1的输入引脚是u6的pa2引脚、第二定时器的输入通道2的输入引脚是u6的pa3引脚。
19、进一步的,u11的1引脚连接到微控制器电路3的pc1引脚,u11的4引脚连接到微控制器电路3的pc0引脚,u11的2、3引脚连接到微控制器电路3的pd5引脚。
20、进一步的,u8的1引脚连接到微控制器电路3的pc3引脚,u8的4引脚连接到微控制器电路3的pc2引脚,u8的2、3引脚连接到微控制器电路3的pd4引脚。
21、进一步的,tft液晶显示屏电路6通过h2连接外置的tft显示屏模块电路,h2的1引脚连接+3.3v电源,2引脚连接gnd,3-14引脚依次连接到微控制器电路3的pe7、pe8、pe9、pa7、pa5、pe10、pa6、pa5、pb0、pa7、pa6、pb1引脚。
22、进一步的,usb接口usb1的2脚连接r28,再连接微控制器电路3的pb6引脚,usb1的3脚连接r29,再连接微控制器电路3的pb7引脚。
23、进一步的,u5的6脚串连接r16,再连接到微控制器电路3的pc9引脚,u5的3脚串连接r17,再连接到的微控制器电路3的pc8引脚,u5的2脚串连接r18,再连接到微控制器电路3的pc7引脚,u5的1脚串连接r19,再连接到微控制器电路3的pc6引脚,u5的10脚连接到微控制器电路3的pd1引脚,u5的11脚连接到微控制器电路3的pd2引脚。
24、进一步的,u9的1引脚连接到微控制器电路3的pc5引脚,u9的4引脚连接到微控制器电路3的pc4引脚,u9的2、3引脚连接到微控制器电路3的pd3引脚。
25、进一步的,p11的7引脚串联连接r27、再连接微控制器电路3的pa13引脚,p11的9引脚串联连接r26、再连接微控制器电路3的pa14引脚,p11的8引脚连接微控制器电路3第四异步串行功能的pa10引脚,p11的10引脚连接微控制器电路3第四异步串行功能的pa9引脚。
26、进一步的,sw1的1、2引脚连接微控制器电路3的nrst引脚。
27、进一步的,u4的1、3、5脚依次连接微控制器电路3的pb4、pb3、pb5引脚。
28、与现有技术相比,本发明的有益效果是:
29、1、本发明采用双路编码信号同时输入,可以实时对比两路转动对象的角度、角速度、角加速度等参数,采用脉冲编码接口和串行数字编码接口,可以适应多种编码器。
30、2、本发明设计有网络通信接口、usb接口和rs-485通信接口,可以以多种方式与上位机相连接。
- 还没有人留言评论。精彩留言会获得点赞!