利用多输出进行相干信号组合以用于准连续波LIDAR操作的制作方法
背景技术:
1、通常由助记符lidar引用的使用激光的距离的光学检测以用于光检测和测距,有时也称为激光radar,被用于从测高到成像、到避免碰撞的各种应用。与诸如无线电波探测和测距(radar)的传统微波测距系统相比,lidar使用更小的光束尺寸提供更精细规模的距离分辨率。能够利用几种不同的技术来完成距离的光学检测,该技术包括基于光脉冲到物体的往返行程时间的直接测距,以及基于发射的啁啾光信号和从物体散射的返回信号之间的频率差的啁啾检测,以及基于可与自然信号区分开的单频相位变化序列的相位编码检测。
技术实现思路
1、本公开的各方面总体上涉及光学领域中的光检测和测距(lidar),更具体地,涉及用于利用多输出进行相干信号组合以用于准连续波lidar操作以支持车辆的操作的系统和方法。
2、在一个方面,本公开涉及一种用于光检测和测距(lidar)操作的信号处理系统。在一些实施方式中,该信号处理系统包括放大器,该放大器被配置为接收分别与多个相位相关联的多个光信号,并使用该多个光信号生成多个放大的光信号。在一些实施方式中,信号处理系统包括分路器,该分路器被耦合到放大器,并且被配置为接收多个放大的光信号,并且根据多个相位组合该多个放大的光信号以跨多个输出生成光信号。
3、在另一方面,本公开涉及一种包括信号处理系统的lidar系统。在一些实施方式中,该信号处理系统包括移相器,该移相器被配置为接收多个光信号并生成分别与多个相位相关联的多个移相的光信号。在一些实施方式中,该信号处理系统包括放大器,该放大器被配置为接收多个移相的光信号,并使用该多个移相的光信号生成多个放大的光信号。在一些实施方式中,该信号处理系统包括分路器,该分路器被耦合到放大器,并且被配置为接收多个放大的光信号,并且根据多个相位组合多个放大的光信号以跨多个输出生成光信号。
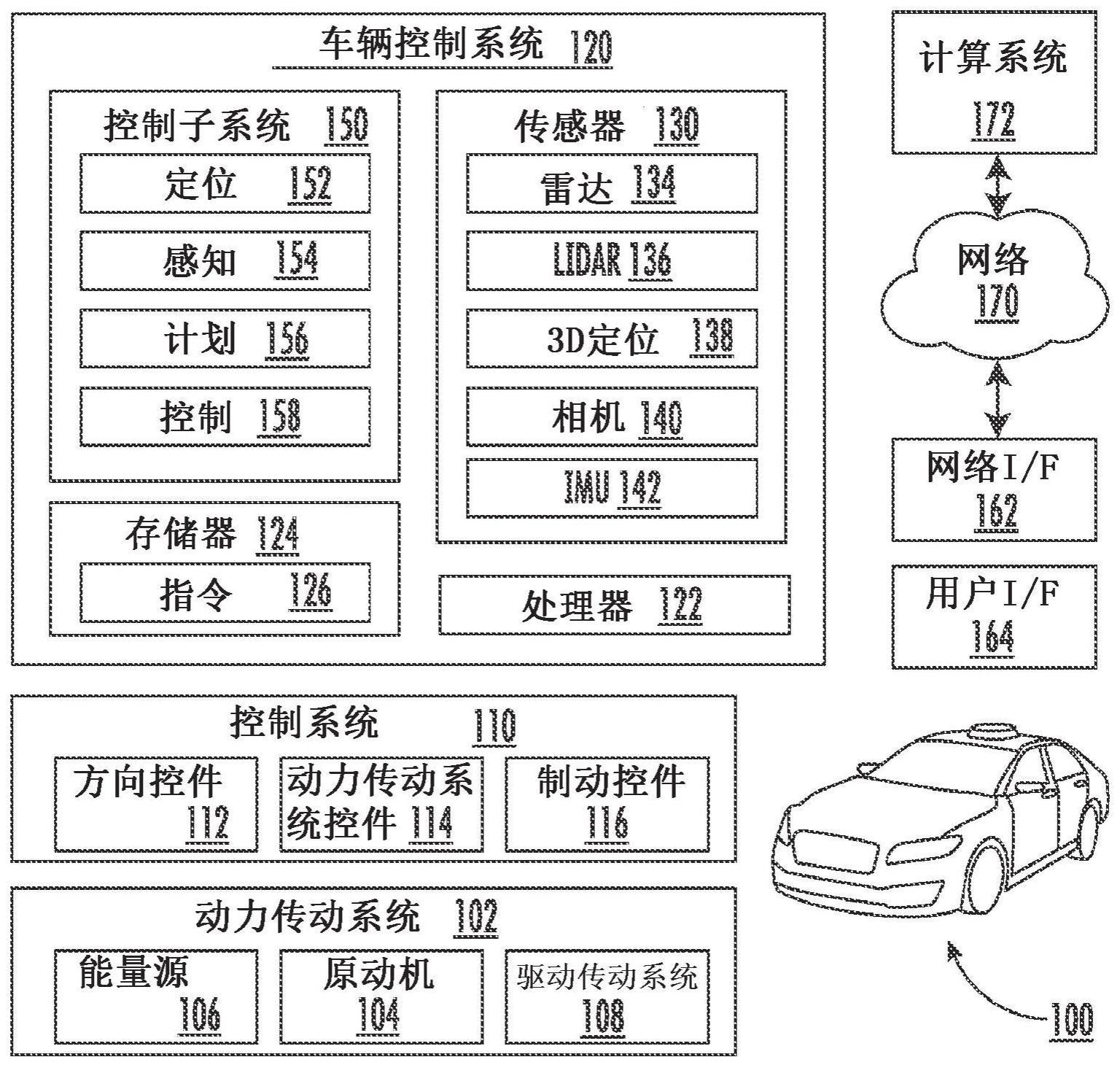
4、在又一方面,本公开涉及一种自动驾驶车辆控制系统,包括用于lidar操作的信号处理系统。在一些实施方式中,该信号处理系统包括移相器,该移相器被配置为接收多个光信号并生成分别与多个相位相关联的多个移相的光信号。在一些实施方式中,该信号处理系统包括放大器,该放大器被配置为接收多个移相的光信号,并使用多个移相的光信号生成多个放大的光信号。在一些实施方式中,该信号处理系统包括分路器,该分路器被耦合到放大器,并且被配置为接收多个放大的光信号,并且根据多个相位组合多个放大的光信号以跨多个输出生成光信号。在一些实施方式中,该信号处理系统包括一个或多个处理器,该处理器被配置为使用光信号控制自动驾驶车辆的操作。
5、仅通过说明许多特定的实施方式和实施方式,包括预期用于实施本公开的最佳模式,从下面的详细描述中,其他方面、特征和优点是显而易见的。其他实施方式也能够具有其他不同的特征和优点,并且能够在各种明显的方面对其若干细节进行修改,所有这些均不背离本公开的精神和范围。因此,附图和描述本质上应被认为是说明性的,而不是限制性的。
技术特征:
1.一种光探测和测距(lidar)系统,包括:
2.根据权利要求1所述的lidar系统,其中,所述多个相位中的第一相位不同于所述多个相位中的第二相位。
3.根据权利要求1所述的lidar系统,其中,所述放大器包括多个子放大器,所述子放大器分别被配置为:
4.根据权利要求3所述的lidar系统,其中,所述光学网络包括分别耦合到所述多个子放大器中的相应一个的多个光束分路器,其中,所述多个光束分路器分别被配置为:
5.根据权利要求3所述的lidar系统,其中,
6.根据权利要求5所述的lidar系统,其中,所述多个光信号分别对应于准连续波信号,其中,所述光学网络还被配置为:
7.根据权利要求1所述的lidar系统,其中,所述多个放大的光信号的数量大于或等于四。
8.一种自动驾驶车辆控制系统,包括一个或多个处理器,
9.根据权利要求8所述的自动驾驶车辆控制系统,其中,所述多个相位中的第一相位不同于所述多个相位中的第二相位。
10.根据权利要求8所述的自动驾驶车辆控制系统,其中,所述放大器包括多个子放大器,
11.根据权利要求10所述的自动驾驶车辆控制系统,其中,所述光学网络包括分别耦合到所述多个子放大器中的相应一个的多个光束分路器,
12.根据权利要求10所述的自动驾驶车辆控制系统,其中,所述一个或多个处理器被配置为使所述光学网络基于所述多个放大的光信号跨多个输出生成所述光信号,并且
13.根据权利要求12所述的自动驾驶车辆控制系统,其中,所述多个光信号分别对应于准连续波信号,
14.根据权利要求8所述的自动驾驶车辆控制系统,其中,所述多个放大的光信号的数量大于或等于四。
15.一种自动驾驶车辆,包括:
16.根据权利要求15所述的自动驾驶车辆,其中,所述多个相位中的第一相位不同于所述多个相位中的第二相位。
17.根据权利要求15所述的自动驾驶车辆,其中,所述放大器包括多个子放大器,
18.根据权利要求17所述的自动驾驶车辆,其中,所述光学网络包括分别耦合到所述多个子放大器中的相应一个的多个光束分路器,
19.根据权利要求17所述的自动驾驶车辆,其中,所述一个或多个处理器被配置为使所述光学网络基于所述多个放大的光信号跨多个输出生成所述光信号,并且
20.根据权利要求19所述的自动驾驶车辆,其中,所述多个光信号分别对应于准连续波信号,
技术总结
本发明涉及利用多输出进行相干信号组合以用于准连续波LIDAR操作。一种用于光检测和测距(LIDAR)操作的信号处理系统包括放大器和耦合到该放大器的分路器。该放大器被配置为接收分别与多个相位相关联的多个光信号,并使用该多个光信号生成多个放大的光信号。该分路器被配置为接收多个放大的光信号,并根据多个相位组合多个放大的光信号以跨多个输出生成光信号。
技术研发人员:泽布·巴伯,兰迪·R·雷贝尔,埃米尔·卡德莱茨
受保护的技术使用者:欧若拉运营公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!