重复定位精度确定方法、装置、设备及存储介质与流程
本发明涉及重复定位精度检测,尤其涉及一种重复定位精度确定方法、装置、设备及存储介质。
背景技术:
1、重复定位精度是衡量设备定位精度的一项重要指标,该指标直接体现出设备的运行稳定性和可靠性,在实际生产中,对设备进行提前检测或在线监测设备的重复定位精度,可保证设备的稳定运行和稳定生产。
2、在目前在重复定位精度检测需求中,需要同时检测x、y、z三个方向的重复定位精度,且在对设备的检测重复定位精度的过程中,不能影响设备在x向的直线贯通运动,以保证设备的正常运行和正常生产。但目前大部分重复定位精度检测仪产品并没有可以解决上述需求的重复定位精度检测仪,而且由于制造能实现该方法的检测仪成本较高,在实际应用也没有得到更大的推广和更广泛的应用。
技术实现思路
1、本发明提供了一种重复定位精度确定方法、装置、设备及存储介质,在且不影响x方向的直线贯通运动时得到x、y、z三个方向的重复定位精度,提高了获取重复定位精度的准确度及效率。
2、本发明实施例的第一方面提供了一种重复定位精度确定方法,所述方法包括:
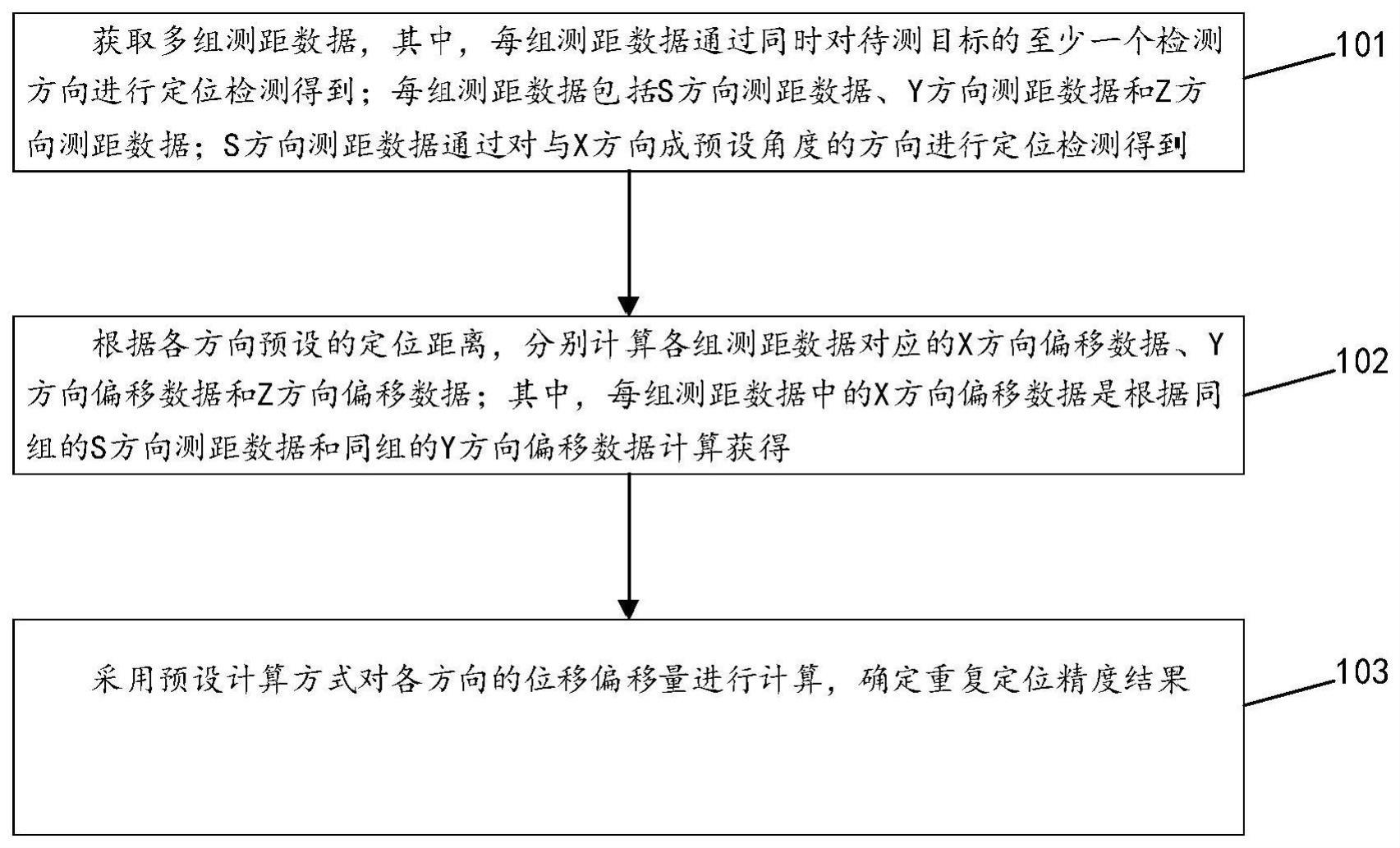
3、获取多组测距数据,其中,每组测距数据通过同时对待测目标的至少一个检测方向进行定位检测得到;每组测距数据包括s方向测距数据、y方向测距数据和z方向测距数据;s方向测距数据通过对与x方向成预设角度的方向进行定位检测得到;
4、根据各方向预设的定位距离,分别计算各组测距数据对应的x方向偏移数据、y方向偏移数据和z方向偏移数据;其中,每组测距数据中的x方向偏移数据是根据同组的s方向测距数据和同组的y方向偏移数据计算获得;
5、根据多组测距数据在同一方向的偏移数据,分别确定各方向的重复定位精度。
6、实施本实施例,在进行重复精度确定时,获取的是s方向测距数据、y方向测距数据和z方向测距数据,而s方向测距数据通过对与x方向成预设角度的方向进行定位检测得到,不直接测量x方向;然后根据方向预设的定位距离,计算各方向的偏移数据,x方向的偏移数据是根据同组的s方向测距数据和同组的y方向偏移数据计算获得;最后由各方向的偏移数据计算得到x、y、z三个方向的重复定位精度。相比于现有技术在重复精度确定时会阻碍x方向的直线贯通运动,本发明实施例通过新增测量方向,能在不影响x方向的直线贯通运动的同时进行x、y、z方向的重复精度,提高了获取重复定位精度的准确度及效率。
7、在第一方面的一种可能的实现方式中,根据各方向预设的定位距离,分别计算各组测距数据对应的x方向偏移数据、y方向偏移数据和z方向偏移数据,具体为:
8、当待计算测距数据为s方向测距数据时,根据x方向的预设定位数据、待计算测距数据、预设角度以及同组测距数据中的y方向偏移数据,计算获得x方向偏移数据;
9、当待计算测距数据为y方向的测距数据时,根据y方向的预设定位数据和待计算测距数据,计算获得y方向偏移数据;
10、当待计算测距数据为z方向的测距数据时,根据z方向的预设定位数据和待计算测距数据,计算获得z方向偏移数据。
11、在第一方面的一种可能的实现方式中,根据x方向的预设定位数据、待计算测距数据、预设角度以及同组测距数据中的y方向偏移数据,计算获得x方向偏移数据,具体为:
12、利用预设三角函数关系式对x方向的预设定位数据、待计算测距数据、预设角度以及同组测距数据中的y方向偏移数据进行计算,获得x方向偏移数据,其中,预设三角函数关系式为:
13、δx=[(s′-m)-δy*cosθ1]/sinθ1
14、其中,δx表示x方向偏移数据,s′表示s方向测距数据,δy表示y方向偏移数据,θ1表示预设角度度数,m表示x方向的预设定位数据。
15、实施本实施例,通过测距设备检测出s、y、z三个方向上的测距数据后,再利用三角函数关系式对s方向测距数据和y方向偏移数据进行计算,计算出x方向的偏移量,本方法通过使用两个测距设备检测出数据计算x方向的偏移量,可以在不影响设备在x方向的直线贯通运动的情况下,得到x方向的重复定位精度,提高了获取重复定位精度的效率。
16、在第一方面的一种可能的实现方式中,根据多组测距数据在同一方向的偏移数据,分别确定各方向的重复定位精度,具体为:
17、分别对多组测距数据中的x方向偏移数据、y方向偏移数据和z方向偏移数据进行均值计算,得到x方向偏移数据均值、y方向偏移数据均值和z方向偏移数据均值;
18、根据x方向偏移数据均值和x方向偏移数据进行样本标准差计算,得到x方向的重复定位精度,计算公式为:
19、
20、其中,rx表示x方向的重复定位精度,δxj表示第j组的x方向偏移数据,表示x方向偏移数据均值,n1表示x方向偏移数据的数量;
21、根据y方向偏移数据均值和y方向偏移数据进行样本标准差计算,得到y方向的重复定位精度,计算公式为:
22、
23、其中,ry表示y方向的重复定位精度,δyj表示第j组的y方向偏移数据,表示y方向偏移数据均值,n2表示y方向偏移数据的数量;
24、根据z方向偏移数据均值和z方向偏移数据进行样本标准差计算,得到z方向的重复定位精度,计算公式为:
25、
26、其中,rz表示z方向的重复定位精度,δzj表示第j组的z方向偏移数据,表示z方向偏移数据均值,n3表示z方向偏移数据的数量。
27、在第一方面的一种可能的实现方式中,获取多组测距数据,包括:
28、通过预设的三个测距设备同时对待测目标的三个检测方向进行定位检测,将得到的s方向测距数据、y方向测距数据和z方向测距数据作为一组测距数据。
29、在第一方面的一种可能的实现方式中,测距设备为激光位移传感器、脉冲测距仪、声波测距仪或超声波测距仪的一种或多种。
30、本发明实施例的第二方面提供了一种重复定位精度确定装置,所述装置包括:
31、获取模块,用于获取多组测距数据,其中,每组测距数据通过同时对待测目标的至少一个检测方向进行定位检测得到;每组测距数据包括s方向测距数据、y方向测距数据和z方向测距数据;s方向测距数据通过对与x方向成预设角度的方向进行定位检测得到;
32、偏移数据计算模块,用于根据各方向预设的定位距离,分别计算各组测距数据对应的x方向偏移数据、y方向偏移数据和z方向偏移数据;其中,每组测距数据中的x方向偏移数据是根据同组的s方向测距数据和同组的y方向偏移数据计算获得;
33、重复定位精度计算模块,用于根据多组测距数据在同一方向的偏移数据,分别确定各方向的重复定位精度。
34、在第二方面的一种可能的实现方式中,偏移数据计算模块包括x方向偏移数据计算单元、y方向偏移数据计算单元和z方向偏移数据计算单元,
35、其中,x方向偏移数据计算单元用于当待计算测距数据为s方向测距数据时,根据x方向的预设定位数据、待计算测距数据、预设角度以及同组测距数据中的y方向偏移数据,计算获得x方向偏移数据;
36、y方向偏移数据计算单元用于当待计算测距数据为y方向的测距数据时,根据y方向的预设定位数据和待计算测距数据,计算获得y方向偏移数据;
37、z方向偏移数据计算单元用于当待计算测距数据为z方向的测距数据时,根据z方向的预设定位数据和待计算测距数据,计算获得z方向偏移数据。
38、在第二方面的一种可能的实现方式中,x方向偏移数据计算单元包括三角函数关系式计算子单元,
39、三角函数关系式计算子单元用于利用预设三角函数关系式对x方向的预设定位数据、待计算测距数据、预设角度以及同组测距数据中的y方向偏移数据进行计算,获得x方向偏移数据,其中,预设三角函数关系式为:
40、δx=](s′-m)-δy*cosθ1]/sinθ1
41、其中,δx表示x方向偏移数据,s′表示s方向测距数据,δy表示y方向偏移数据,θ1表示预设角度度数,m表示x方向的预设定位数据。
42、在第二方面的一种可能的实现方式中,重复定位精度计算模块包括偏移数据均值计算单元、x方向重复定位精度计算单元、y方向重复定位精度计算单元和z方向重复定位精度计算单元,
43、其中,偏移数据均值计算单元用于分别对多组测距数据中的x方向偏移数据、y方向偏移数据和z方向偏移数据进行均值计算,得到x方向偏移数据均值、y方向偏移数据均值和z方向偏移数据均值;
44、x方向重复定位精度计算单元用于根据x方向偏移数据均值和x方向偏移数据进行样本标准差计算,得到x方向的重复定位精度,计算公式为:
45、
46、其中,rx表示x方向的重复定位精度,δxj表示第j组的x方向偏移数据,表示x方向偏移数据均值,n1表示x方向偏移数据的数量;
47、y方向重复定位精度计算单元用于根据y方向偏移数据均值和y方向偏移数据进行样本标准差计算,得到y方向的重复定位精度,计算公式为:
48、
49、其中,ry表示y方向的重复定位精度,δyj表示第j组的y方向偏移数据,表示y方向偏移数据均值,n2表示y方向偏移数据的数量;
50、z方向重复定位精度计算单元用于根据z方向偏移数据均值和z方向偏移数据进行样本标准差计算,得到z方向的重复定位精度,计算公式为:
51、
52、其中,rz表示z方向的重复定位精度,δzj表示第j组的z方向偏移数据,表示z方向偏移数据均值,n3表示z方向偏移数据的数量。
53、本发明实施例的第三方面提供了一种电子设备,包括存储器和处理器,存储器用于存储计算机程序,处理器用于执行所述计算机程序时实现如本实施例所述的重复定位精度确定方法。
54、本发明实施例的第四方面提供了一种存储介质,存储介质上存储有计算机程序,计算机程序被处理器执行时实现如本实施例所示的重复定位精度确定方法的步骤。
- 还没有人留言评论。精彩留言会获得点赞!