一种目标三维被动定位方法及装置
本发明属于水声探测、声呐技术等领域,具体涉及一种目标三维被动定位方法及装置。
背景技术:
1、深海目标被动定位是近些年水声学研究的热点问题,垂直阵是深海目标定位的常用阵型之一。已有大量工作利用深海标量垂直阵来实现目标距离和深度的估计,如文献(aperformancestudyofacousticinterferencestructureapplicationsonsourcedepthestimationindeepwater,2019年2月发表在《j.acoust.soc.am.》第145期,起始页码为903)、文献(“performancemetricsfordepth-basedsignalseparationusingdeepverticallinearrays”,2016年1月发表在《j.acoust.soc.am.》第139期,起始页码为418)、文献(“passivesourcelocalizationbasedonmultipatharrivalangles withaverticallinearrayusingsparsebayesianlearning”,2023年3月发表在《j.acoust.soc.am.》第153期,起始页码为773)等。但是,深海标量垂直阵由于无目标方位估计能力,仅能给出目标距离深度信息而无法给出目标的具体坐标信息,限制了其进一步的应用。
技术实现思路
1、本发明的目的在于克服现有深海标量垂直阵由于无目标方位估计能力,仅能给出目标距离深度信息而无法给出目标的具体坐标信息的缺陷。
2、为了实现上述目的,本发明提出了一种目标三维被动定位方法,基于矢量垂直阵实现,所述矢量垂直阵包括声压通道和矢量通道;每个阵元上设置矢量传感器姿态仪;
3、所述方法包括:
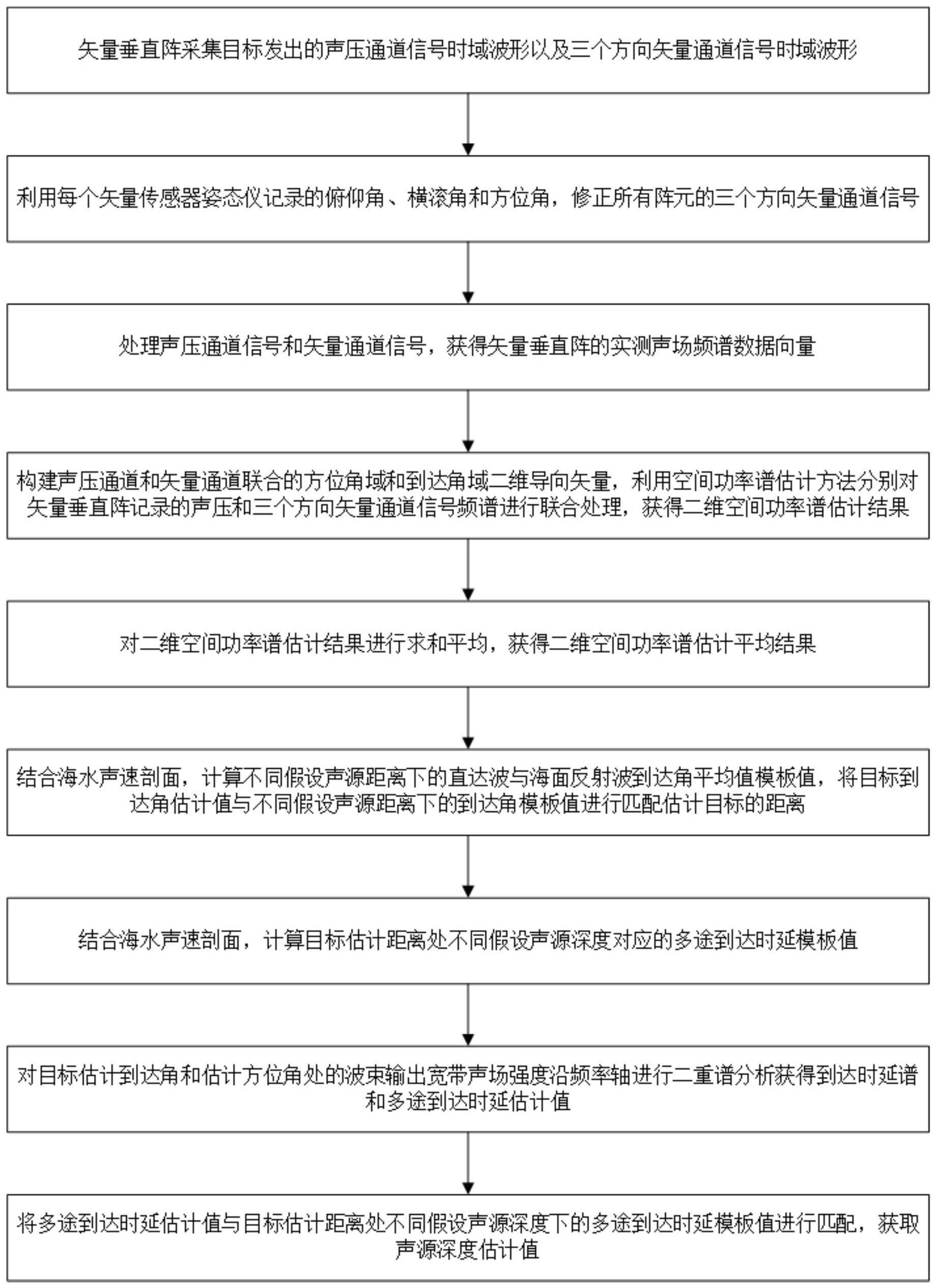
4、步骤1:矢量垂直阵采集待测目标发出的声压通道信号时域波形以及三个方向矢量通道信号时域波形;
5、步骤2:利用每个矢量传感器姿态仪记录的俯仰角、横滚角和方位角,修正所有阵元的三个方向矢量通道信号;
6、步骤3:处理声压通道时域信号和矢量通道时域信号,获得矢量垂直阵的实测声场频谱数据向量;
7、步骤4:构建声压通道和矢量通道联合的方位角域和到达角域二维导向矢量,利用空间功率谱估计方法分别对矢量垂直阵记录的声压和三个方向矢量通道信号频谱进行联合处理,获得二维空间功率谱估计结果;
8、步骤5:对二维空间功率谱估计结果进行求和平均,获得二维空间功率谱估计平均结果;
9、步骤6:结合海水声速剖面,计算不同假设声源距离下的直达波与海面反射波到达角平均值模板值,将待测目标到达角估计值与不同假设声源距离下的到达角模板值进行匹配,估计待测目标的距离;
10、步骤7:结合海水声速剖面,计算待测目标估计距离处不同假设声源深度对应的多途到达时延模板值;
11、步骤8:对待测目标估计到达角和估计方位角处的波束输出宽带声场强度沿频率轴进行二重谱分析,获得到达时延谱和多途到达时延估计值;
12、步骤9:将多途到达时延估计值与待测目标估计距离处不同假设声源深度下的多途到达时延模板值进行匹配,获取待测目标深度估计值。
13、作为上述方法的一种改进,以矢量垂直阵轴线与海平面的交点为坐标原点建立三维坐标系,垂直于海平面向下为z轴正方形,x、y轴组成的平面与海平面重合;
14、所述三个方向矢量通道信号为x、y、z三个方向矢量通道信号,x、y、z三个方向分别为x、y、z三个坐标轴的正方向。
15、作为上述方法的一种改进,所述步骤2具体为:修正后的x、y、z三个方向矢量通道信号为:
16、
17、其中,矩阵中各元素含义如下:
18、a11=cosα1(n,k,t)cosα3(n,k,t)
19、a12=sinα1(n,k,t)cosα3(n,k,t)sinα2(n,k,t)-sinα3(n,k,t)cosα2(n,k,t)
20、a13=sinα1(n,k,t)cosα3(n,k,t)cosα2(n,k,t)+sinα3(n,k,t)sinα2(n,k,t)
21、a21=cosα1(n,k,t)sinα3(n,k,t)
22、a22=sinα1(n,k,t)sinα3(n,k,t)sinα2(n,k,t)+cosα3(n,k,t)cosα2(n,k,t)
23、a23=sinα1(n,k,t)sinα3(n,k,t)cosα2(n,k,t)-cosα3(n,k,t)sinα2(n,k,t)
24、a31=-sinα1(n,k,t)
25、a32=cosα1(n,k,t)sinα2(n,k,t)
26、a33=cosα1(n,k,t)cosα2(n,k,t)
27、n=1,2,...,n表示矢量垂直阵阵元编号,n表示矢量垂直阵阵元个数;k=1,2,...,k表示信号快拍数序号,k表示信号总快拍数;t表示时间;
28、sx(n,k,t)表示修正后的x方向矢量通道信号;sy(n,k,t)表示修正后的y方向矢量通道信号;sz(n,k,t)表示修正后的z方向矢量通道信号;sx0(n,k,t)表示矢量垂直阵接收的x方向矢量通道信号时域波形;sy0(n,k,t)表示矢量垂直阵接收的y方向矢量通道信号时域波形;sz0(n,k,t)表示矢量垂直阵接收的z方向矢量通道信号时域波形;
29、α1(n,k,t)表示矢量传感器姿态仪记录的俯仰角;α2(n,k,t)表示矢量传感器姿态仪记录的横滚角;α3(n,k,t)表示矢量传感器姿态仪记录的方位角。
30、作为上述方法的一种改进,所述步骤3具体为:
31、对矢量垂直阵列采集的声压和矢量通道时域信号进行快速傅里叶变换获得声压通道信号频谱sp(n,k,fl)、以及x、y、z三通道的矢量通道信号频谱sx(n,k,fl)、sy(n,k,fl)和sz(n,k,fl),l=1,2,...,l,f1和fl分别为信号处理频段的上界和下界,l为处理频段内包含的频点个数,fl表示第l个信号处理频段频率;将矢量通道和声压通道数据组合,获得整个矢量垂直阵的实测声场频谱数据向量s(k,fl)为:
32、s(k,fl)=[sx(1,k,fl),sx(2,k,fl),...,sx(n,k,fl),sy(1,k,fl),sy(2,k,fl),...,sy(n,k,fl),sz(1,k,fl),sz(2,k,fl),...,sz(n,k,fl),sp(1,k,fl),sp(2,k,fl),...,sp(n,k,fl)]t
33、其中,上标t表示矩阵或向量的转置。
34、作为上述方法的一种改进,所述步骤4具体为:
35、构建声压通道和矢量通道联合的方位角域和到达角域二维导向矢量,利用空间功率谱估计方法分别对矢量垂直阵记录的声压和矢量三通道信号频谱进行联合处理,获得二维空间功率谱估计结果b(fl,θ,φ),其中θ为目标到达角搜索值,φ为目标方位角搜索值;频率为fl处的空间功率谱估计公式为:
36、b(fl,θ,φ)=ah(fl,θ,φ)r(fl)a(fl,θ,φ)
37、其中,a(fl,θ,φ)为声压通道和矢量通道联合的方位角域和到达角域二维导向矢量:
38、
39、a(fl)为声压通道和矢量通道灵敏度差异引入的信号幅度差异;为声压通道和矢量通道的相位差,当矢量通道为测量质点振速的传感器时,相位差为0;当矢量通道为测量质点加速度的传感器时,相位差为π2;为垂直阵单一通道的导向矢量,dn为垂直阵第n个阵元与第一个阵元的间距;e表示自然常数;
40、r(fl)是由整个矢量垂直阵声压通道和矢量三通道数据联合估计的4n×4n维互谱密度矩阵:
41、
42、其中,上标h代表矩阵的共轭转置。
43、作为上述方法的一种改进,所述步骤5具体为:
44、对多频点的二维空间功率谱估计结果进行求和平均,获得宽带二维空间功率谱估计平均结果
45、
46、取中目标所对应峰值处的到达角为目标到达角估计值目标所对应峰值处的方位角为目标方位角估计值为在目标到达角和方位角上的宽带波束输出声场强度。
47、作为上述方法的一种改进,所述步骤6具体为:
48、结合海水声速剖面,利用声场计算模型bellhop计算不同假设声源距离下的直达波与海面反射波到达角平均值模板值θmod(rs),将目标到达角估计值与不同假设声源距离下的到达角模板值进行匹配估计目标的距离,距离估计代价函数定义为:
49、
50、取代价函数最大值对应的距离为声源距离估计值,即
51、作为上述方法的一种改进,所述步骤7具体为:
52、获得目标估计距离后,结合海水声速剖面,利用声场计算模型bellhop计算该距离处不同假设声源深度对应的多途到达时延模板值
53、作为上述方法的一种改进,所述步骤8具体为:
54、利用反傅里叶变换或music等谱分析方法对目标估计到达角和估计方位角处的波束输出宽带声场强度沿频率轴进行二重谱分析获得到达时延谱q1(τj),τj表示时间到达时延;取到达时延谱中除了零时延峰值之外的第二大峰值对应的时延为多途到达时延估计值
55、作为上述方法的一种改进,所述步骤9具体为:
56、将多途到达时延估计值与目标估计距离处不同假设声源深度下的模板值进行匹配,定义深度估计代价函数为:
57、
58、取代价函数最大值对应的深度为声源深度估计值,即
59、本技术还提供一种目标三维被动定位装置,基于上述方法实现,所述装置包括:矢量垂直阵和三维定位系统;
60、所述矢量垂直阵包括声压通道和矢量通道;每个阵元上设置矢量传感器姿态仪;所述矢量垂直阵采集待测目标发出的声压通道信号时域波形以及三个方向矢量通道信号时域波形;
61、所述三维定位系统包括:
62、角度修正模块,用于利用每个矢量传感器姿态仪记录的俯仰角、横滚角和方位角,修正所有阵元的三个方向矢量通道信号;
63、声压通道和矢量通道信号频谱计算模块,用于处理声压通道时域信号和矢量通道时域信号,获得声压通道信号频谱和矢量通道信号频谱;
64、二维空间功率谱估计模块,用于构建声压通道和矢量通道联合的方位角域和到达角域二维导向矢量,利用空间功率谱估计方法分别对矢量垂直阵记录的声压和三个方向矢量通道信号频谱进行联合处理,获得二维空间功率谱估计结果;
65、二维空间功率谱估计平均结果计算模块,用于对二维空间功率谱估计结果进行求和平均,获得二维空间功率谱估计平均结果;
66、待测目标距离估计模块,用于结合海水声速剖面,计算不同假设声源距离下的直达波与海面反射波到达角平均值模板值,将待测目标到达角估计值与不同假设声源距离下的到达角模板值进行匹配估计待测目标的距离;
67、多途到达时延模板值计算模块,用于结合海水声速剖面,计算待测目标估计距离处不同假设声源深度对应的多途到达时延模板值;
68、到达时延谱和多途到达时延估计值计算模块,用于对待测目标估计到达角和估计方位角处的波束输出宽带声场强度沿频率轴进行二重谱分析获得到达时延谱和多途到达时延估计值;
69、声源深度估计模块,用于将多途到达时延估计值与待测目标标估计距离处不同假设声源深度下的多途到达时延模板值进行匹配,获取待测目标深度估计值。
70、与现有技术相比,本发明的优势在于:
71、本发明提供了一种目标三维被动定位方法及装置,通过构建声压通道和矢量通道联合处理的方位角域和到达角域二维导向矢量,对矢量垂直阵接收信号进行二维空间功率谱估计,充分利用了声压和矢量通道联合处理增益,实现了目标方位、距离和深度的估计,解决了现有标量垂直阵无目标方位估计能力的问题。
- 还没有人留言评论。精彩留言会获得点赞!