一种测量来袭激光目标距离的多参数双目激光告警装置
本发明属于激光告警装置,具体涉及一种测量来袭激光目标距离的多参数双目激光告警装置。
背景技术:
1、激光测试技术是光电信息测试的重要组成,其作用就通过对激光设备、激光武器等装备的探测,确定激光设备的方向、距离及激光特征,判断激光设备指标性能,为激光设备研制验收、定期优化校准以及维修提供依据。来袭激光的波长、方位角、俯仰角、脉冲宽度以及距离等参数的快速、精确的获取作为激光脉宽测量技术的核心,因为不同类型、不同波长的激光用途不同,只有准确获取入射激光波长、方位和距离信息、脉冲激光的脉冲宽度信息才能正确判别来袭激光的种类和方位、判断脉冲激光的指标性能,根据激光武器的方向进行拦截和破坏,对其实施干扰使其激光武器丢失目标。现有激光告警只能实现对来袭激光进行波长、方向以及脉宽参数的测量,不能对来袭激光进行距离测量
技术实现思路
1、针对上述现有激光告警只能实现对来袭激光进行波长、方向以及脉宽参数的测量,不能对来袭激光进行距离测量的技术问题,本发明提供了一种测量来袭激光目标距离的多参数双目激光告警装置,通过多加一组镜头采用视差测距法,推算出激光光源距离。通过光栅衍射光斑0级和1级实现波长和角度测量,通过对激光脉冲信号进行时间间隔的测量实现对来袭激光的脉宽测量,从而实现对来袭激光的波长、方向、脉宽、距离参数的测量。
2、为了解决上述技术问题,本发明采用的技术方案为:
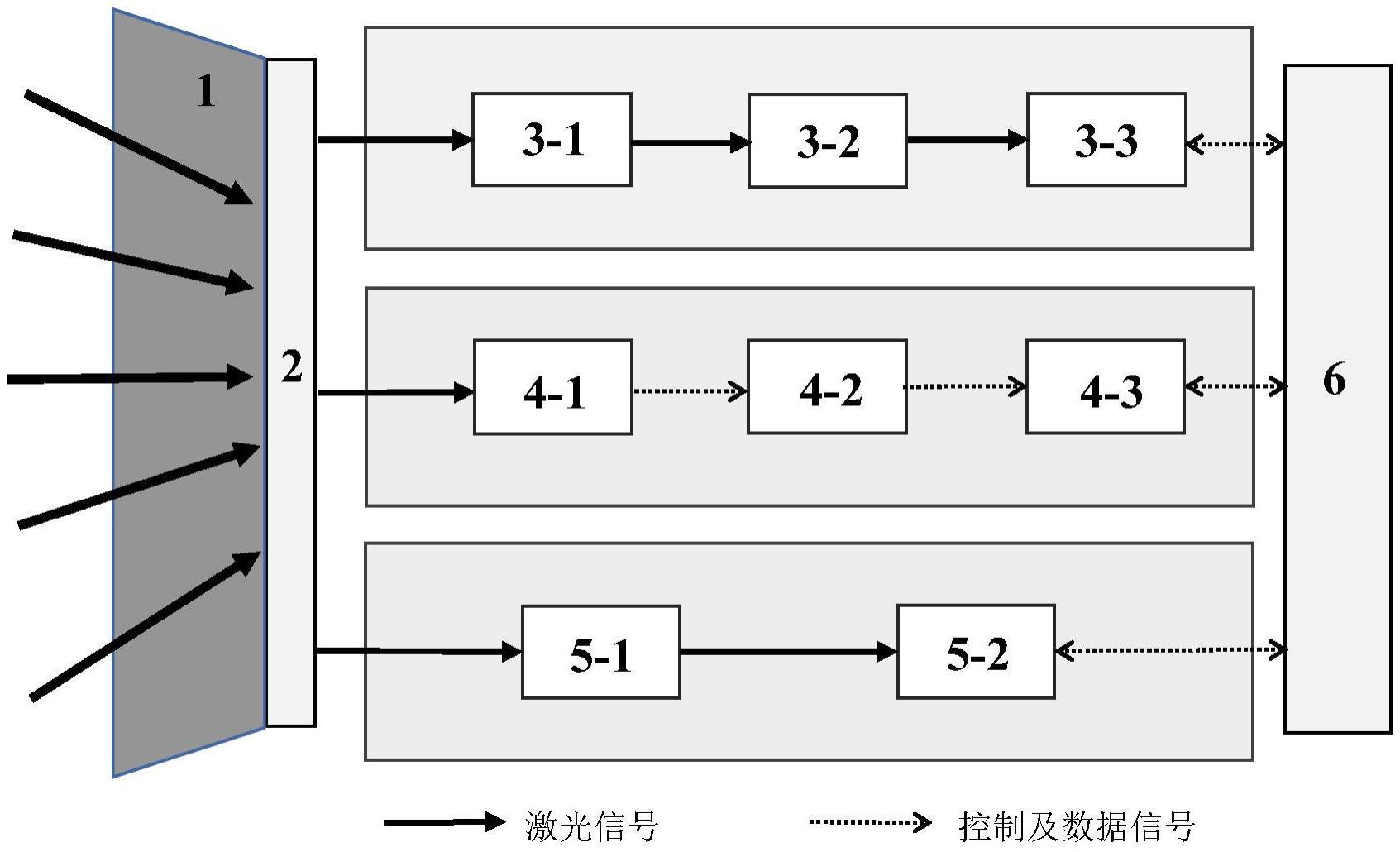
3、一种测量来袭激光目标距离的多参数双目激光告警装置,包括遮光罩、接受窗口、测量激光波长和方向模块、测量激光脉宽模块、测量激光距离模块、控制及数据处理模块,所述遮光罩设置在接受窗口上,所述接受窗口的光路方向上分别设置有测量激光波长和方向模块、测量激光脉宽模块和测量激光距离模块,所述测量激光波长和方向模块、测量激光脉宽模块和测量激光距离模块均电性连接在控制及数据处理模块上。
4、所述测量激光波长和方向模块包括宽波段光栅、第一光学系统、第一焦平面探测器,所述宽波段光栅设置在接受窗口的光路方向上,所述第一光学系统设置在宽波段光栅的光路方向上,所述第一焦平面探测器设置在第一光学系统的光路方向上,所述第一焦平面探测器与控制及数据处理模块电性连接。
5、所述测量激光脉宽模块包括高速光电探测器、脉冲整形电路、时间测量单元,所述高速光电探测器设置在接受窗口的光路方向上,所述脉冲整形电路设置在高速光电探测器的光路方向上,所述时间测量单元与脉冲整形电路电性连接,所述时间测量单元与控制及数据处理模块电性连接。
6、所述测量激光距离模块包括第二光学系统、第二焦平面探测器,所述第二光学系统设置在接受窗口的光路方向上,所述第二焦平面探测器设置在第二光学系统的光路方向上,所述第二焦平面探测器与控制及数据处理模块电性连接。
7、一种测量来袭激光目标距离的多参数双目激光告警装置的告警方法,包括下列步骤:
8、s1、遮光罩遮挡视场外的太阳光、闪电等光的干涉;宽波段光栅用于对来袭激光进行光线衍射;
9、s2、第一光学系统以及第二光学系统滤除强烈的背景光噪声,同时将衍射光束聚集到平面探测器和第二焦平面探测器上,形成光斑同时也能提高光斑提取精度;
10、s3、高速光电探测器进行光电转换,将激光信号转换成电信号;脉冲整形电路对转换后的电信号进行处理,达到时间测量单元的输入要求;时间测量单元能将脉冲宽度的测量转换为脉冲时间间隔,测得脉冲时间间隔的值;
11、s4、来袭激光的方位角和俯仰角通过第一焦平面探测器的0级衍射光斑的横纵坐标计算获得,来袭激光的波长通过第一焦平面探测器的0级和1级衍射光斑的距离计算获得;
12、s5、来袭激光的脉宽通过时间测量单元来计算两个脉冲沿之间的时间间隔来获得;
13、s6、来袭激光的距离通过第一焦平面探测器和第二焦平面探测上的两个0级光斑的横纵坐标计算获得。
14、所述s4中来袭激光的波长和方向测量方法为:
15、来袭激光进入测量激光波长和方向模块,由宽波段光栅、第一光学系统、第一焦平面探测器组成对来袭激光波长、方位角、俯仰角探测,通过第一焦平面探测器的0级衍射光斑的横坐标实现来袭激光的方位角测量、通过0级衍射光斑的纵坐标实现来袭激光俯仰角测量、通过0级和1级衍射光斑的距离实现来袭激光波长的测量,其中宽波段光栅将来袭激光衍射;第一光学系统用来滤除强烈的背景光噪声,同时将衍射光束聚集到第一焦平面探测器上;通过第一焦平面探测器获得激光零级衍射光斑和一级衍射光斑的横纵坐标位置;第一焦平面探测器将位置信息传送给控制及数据处理模块;并在控制及数据处理模块上计算得出来袭激光的方向和波长。
16、所述s5中来袭激光的脉宽测量方法为:
17、来袭激光进入测量激光脉宽模块,由高速光电探测器、脉冲整形电路、时间测量单元组成,用于测量来袭激光脉宽,通过对比计算脉冲信号相邻上升沿和下降沿的时间间隔来转换成脉冲宽度;其中高速光电探测器将来袭激光转换成电信号,脉冲整形电路对电信号进行放大,整形后产生的差分信号传送给时间测量单,时间测量单接收到处理后的电信号,采用将脉冲宽度转换成两个脉冲沿之间的时间间隔,对比相邻两个上升沿和下降沿的时间间隔计算出脉冲宽度;其中控制及数据处理模块负责产生驱动时间测量单元的驱动信号,控制时间测量单元完成脉冲宽度的测量,最终完成对来袭激光的脉宽测量。
18、所述s6中来袭激光的距离测量方法为:
19、来袭激光进入测量激光距离模块,由第二光学系统、第二焦平面探测器组成,通过第二焦平面探测器的0级衍射光斑的横坐标实现来袭激光的方位角测量、通过0级衍射光斑的纵坐标实现来袭激光俯仰角测量;第二光学系统用来滤除强烈的背景光噪声同时将光束聚集到第二焦平面探测器上获得激光零级光斑的横纵坐标位置;第二焦平面探测器将位置信息传送给控制及数据处理模块;并在控制及数据处理模块计算得出来袭激光的方向;并且结合测量激光波长和方向模块测得的激光零级光斑的横纵坐标位置计算得出来袭激光光源的距离;设xoy平面为探测器平面,x0为激光照射到第一焦平面探测器上的零级光斑,x0'为激光照射到第二焦平面探测器上的零级光斑,将照射到第一探测器的激光光线设为ao,将照射到第二探测器的激光光线设为ae,设α1、β1、γ1分别为激光ao方向与x、y、z轴的交点,α2、β2、γ2分别为激光ae方向与x、y、z轴的交点,oe为两个探测器零级光斑的距离d,ao、ae即为所求激光距离,由于d远远小于ao、ae所以ao、ae近似相等;设第一焦平面探测上的零级光斑及其横纵坐标x0(x0,y0),第二焦平面探测上的零级光斑及其横纵坐标x0'(x0',y0'),设激光ao方向的方位角为θ1俯仰角为激光ae方向的方位角为θ2,俯仰角为进行详细推算:
20、通过第一焦平面探测器获得激光ao方向上的零级衍射光斑的横纵坐标位置x0、第二焦平面探测获得激光ae方向上的零级衍射光斑的横纵坐标位置x0',根据衍射方程得:
21、
22、推算出激光ae方向:
23、
24、由(1-1)推出ao方向的方位角θ1,俯仰角
25、
26、由(1-2)推出ae方向的方位角θ2,俯仰角
27、
28、激光ao方向与x、y、z轴的交点α1、β1、γ1以及激光ae方向与x、y、z轴的交点α2、β2、γ2有以下联系:
29、cos2α+cos2β+cos2γ=1
30、由此推出:
31、
32、
33、激光ao方向上的方位角θ1和俯仰角与ao方向上激光与x、y、z轴的交点α1、β1、γ1有以下关系:
34、
35、激光ae方向上的方位角θ1和俯仰角与ae方向上激光与x、y、z轴的交点α1、β1、γ1有以下关系:
36、
37、将α1、α2带入求出γ1、γ2得到:
38、
39、
40、
41、两个光斑之间的距离为d,设光斑x1到z轴距离为x,激光到探测器的深度为a,γ1、γ2已经推出,因此得出:
42、
43、由此推出x:
44、
45、最后可得ao:
46、
47、d远远小于ao、ae,所以ao、ae近似相等。
48、本发明与现有技术相比,具有的有益效果是:
49、本发明通过多加一组镜头采用视差测距法,推算出激光光源距离。并且本发明通过光栅衍射光斑0级和1级实现波长和角度测量,通过对激光脉冲信号进行时间间隔的测量实现对来袭激光的脉宽测量,从而实现对来袭激光的波长、方向、脉宽、距离参数的测量。
- 还没有人留言评论。精彩留言会获得点赞!