获取目标的位置和取向的方法与流程
本发明涉及智能制造装备产业,具体涉及一种获取目标的位置和取向的方法。
背景技术:
1、在精密工业以及测量领域,人们对设备进行装配的时候,经常需要利用精密仪器对组装的目标物进行测试以提高装配精度,在完成设备的装配后,也需要对机器进行校准。在对目标物或者目标物上的某个目标点进行三维坐标测量时,还需要对它们的姿态进行测量,因此需要一种能够同时测量目标的三维坐标和姿态的姿态检测装置。
2、常用的姿态检测装置包括用于发射和接收激光束的跟踪头以及设置在工件的并用于反射激光束的探头,利用激光束测量探头的三维坐标,并利用设置在探头上的光源获取探头的姿态。然而,在工件的姿态发生变化的过程中,激光束可能超出探头的可接收的角度范围(一般为正负45°),导致探头的反射镜无法接收到激光束,进而影响测量结果。
3、为此,现有技术公开了一种令探头主动地跟踪(也即反向跟踪)跟踪头的姿态检测装置。例如,公开号为cn112424563a的中国专利公开了一种用于精确计算动态对象的位置和方位的多维测量系统,利用目标(也即探头)主动地跟踪激光束单元(也即跟踪头),通过改变探头的姿态以扩大反射元件的可接收的角度范围。
4、然而该专利所涉及的方案中,在计算对象的位置和姿态时,需要使目标分别绕纵倾轴、偏航轴和横摇轴三个旋转轴进行旋转,目标的控制成本较高。
技术实现思路
1、本公开是有鉴于上述的状况而提出的,其目的在于提供一种能够基于靶标的旋转角度和目标的部分欧拉角计算目标的欧拉角,不仅能够扩大靶标的可接收的角度范围,还能够降低靶标控制成本的基于反向跟踪的测量方法和测量系统。
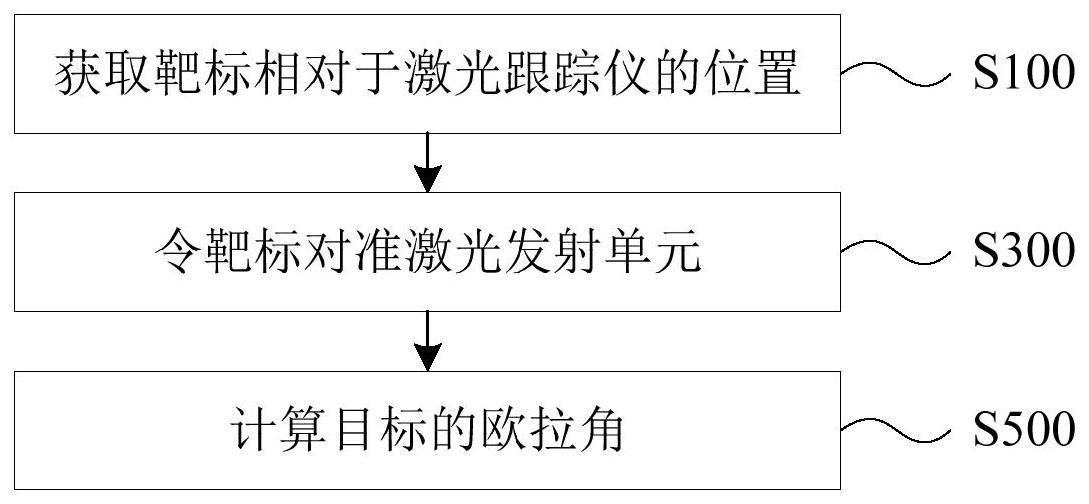
2、为此,本公开的第一方面提供了一种基于反向跟踪的测量方法,是利用具有激光发射单元的激光跟踪仪和设置于目标的并具有可旋转的靶标的探头以获得所述目标的位置和姿态的测量方法,所述测量方法包括:获取所述靶标相对于所述激光跟踪仪的位置,在所述探头中,分别沿两个方向旋转所述靶标以使所述靶标对准所述激光发射单元,基于所述激光跟踪仪的位置和所述靶标沿两个方向的旋转角度计算目标的欧拉角。
3、在这种情况下,令靶标对准激光发射单元,能够实现靶标反向跟踪,进而能够扩大探头所能够接收的激光束的入射角度的范围。由于探头设置于目标,能够利用靶标相对于激光跟踪仪的位置确定目标的位置,由于沿两个方向旋转靶标以使靶标对准激光发射单元,计算靶标沿两个方向的旋转角度能够控制靶标对准激光发射单元,相对于现有的需要控制靶标沿三个方向旋转靶标的方法,能够减少降低靶标的控制成本,靶标对准激光发射单元后,能够利用激光束的方向向量计算出目标的欧拉角。
4、另外,在本公开的第一方面所涉及的测量方法中,可选地,在所述激光跟踪仪中,控制所述激光发射单元发射出的激光束沿第一方向旋转和沿第二方向旋转以改变所述激光发射单元发射出的激光束的方向,令所述激光发射单元发射出的激光束对准所述靶标,并接收所述靶标反射的携带所述靶标的距离信息的激光束,基于携带所述靶标的距离信息的激光束和所述激光发射单元的旋转角度获得所述靶标相对于所述激光跟踪仪的位置。在这种情况下,能够获得靶标相对于激光跟踪仪的位置。
5、另外,在本公开的第一方面所涉及的测量方法中,可选地,通过初步捕获和精细瞄准以使所述激光发射单元发射出的激光束对准所述靶标,所述初步捕获为控制所述激光发射单元发射出的激光束沿所述第一方向旋转和沿所述第二方向旋转以使激光束靠近所述靶标直至所述靶标接收并反射所述激光发射单元发射出的激光束,所述精细瞄准为所述激光跟踪仪接收所述靶标反射的激光束后,控制所述激光发射单元发射出的激光束沿所述第一方向旋转和沿所述第二方向旋转以使激光束经过所述靶标的预设位置,所述预设位置为位于所述靶标的通孔。在这种情况下,即使激光束未达到靶标,激光跟踪仪未接收到靶标反射的激光束,激光发射单元发射出的激光束也能够通过初步捕获靠近靶标,直至靶标能够反射激光束至激光发射单元,同时能够判断激光发射单元发射出的激光束是否对准靶标。
6、另外,在本公开的第一方面所涉及的测量方法中,可选地,初步捕获包括:所述激光跟踪仪发射发散光束,利用设置于所述激光跟踪仪的目标捕获单元接收所述靶标反射的发散光束,基于所述靶标反射的发散光束在所述目标捕获单元形成的目标捕获光斑计算所述激光发射单元的姿态调整方式,控制所述激光发射单元发射出的激光束沿所述第一方向旋转和沿所述第二方向旋转以使激光束靠近所述靶标直至所述靶标接收并反射所述激光发射单元发射出的激光束。在这种情况下,激光跟踪仪发射的是发散光束,即使激光发射单元发射出的激光束未对准靶标,靶标能够容易地接收并反射到发散光束,目标捕获单元能够容易地接收到靶标反射的发散光束,同时,能够基于靶标反射的发散光束获取靶标的大致位置,从而能够控制激光发射单元旋转以使激光发射单元发射出的激光束靠近靶标。
7、另外,在本公开的第一方面所涉及的测量方法中,可选地,所述精细瞄准包括:利用设置于所述激光跟踪仪的第一位置传感单元接收所述靶标反射的激光束,基于所述靶标反射的激光束在所述第一位置传感单元形成的第一光斑计算所述激光发射单元的姿态调整方式,控制所述激光发射单元发射出的激光束沿所述第一方向旋转和沿所述第二方向旋转以使激光束经过所述预设位置。在这种情况下,由于第一位置传感单元接收靶标反射的激光束,因此能够以较高的精度控制激光发射单元发射出的激光束对准并实时跟踪靶标。
8、另外,在本公开的第一方面所涉及的测量方法中,可选地,利用设置于所述靶标的第二位置传感单元接收通过所述预设位置的激光束,基于所述靶标接收的激光束在所述第二位置传感单元的第二光斑计算靶标的姿态调整方式,控制所述靶标沿第三方向旋转和沿第四方向旋转以使所述靶标对准所述激光发射单元。在这种情况下,由于靶标对准激光发射单元后,激光发射单元发射出的激光束垂直入射靶标,也即与第二位置传感单元垂直,能够利用靶标的旋转角度便捷地表示激光束在靶标坐标系的方向向量。
9、另外,在本公开的第一方面所涉及的测量方法中,可选地,计算目标的欧拉角包括:建立激光跟踪仪设备坐标系、目标坐标系和靶标坐标系,获取激光束在所述激光跟踪仪设备坐标系中的方向向量为设备激光束向量,获取所述激光跟踪仪设备坐标系和所述目标坐标系之间的变换关系,获取激光束在所述目标坐标系中的方向向量为目标激光束向量,获取激光束在所述靶标坐标系中的方向向量为靶标激光束向量,测量目标的横滚角和俯仰角,获取所述目标坐标系和所述靶标坐标系之间的变换关系,建立等式并计算目标的偏航角。在这种情况下,能够得到目标的欧拉角。
10、另外,在本公开的第一方面所涉及的测量方法中,可选地,利用设置于所述探头的倾角仪或加速度计获得所述目标的横滚角和俯仰角。由于固定底座设置于目标,与目标相对静止,测量固定底座相对于水平面的倾斜角度,也即目标相对于水平面的倾斜角度,也即目标的横滚角和俯仰角。
11、另外,在本公开的第一方面所涉及的测量方法中,可选地,利用设置于所述激光跟踪仪的第一重力对齐单元获取所述激光跟踪仪相对于水平面的倾斜角度为第一倾斜角度,基于所述第一倾斜角度获取所述激光跟踪仪设备坐标系和所述目标坐标系之间的变换关系;利用设置于所述探头的第二重力对齐单元获取所述探头相对于水平面的倾斜角度为第二倾斜角度,基于第二倾斜角度获取所述目标坐标系和所述靶标坐标系之间的变换关系;基于所述激光发射单元发射出的激光束的旋转角度获取所述设备激光束向量;基于所述激光跟踪仪设备坐标系和所述目标坐标系之间的变换关系和设备激光束向量获取所述目标激光束向量;基于所述靶标的旋转角度获取所述靶标激光束向量。在这种情况下,能够通过测量和计算获得等式中的除偏航角外的其他参数。
12、本公开的第二方面提供了一种基于反向跟踪的测量系统,包括:具有可旋转的激光发射单元的激光跟踪仪和设置于目标的并具有可沿两个方向旋转的靶标的探头,所述测量系统利用本公开第一方面所涉及的测量方法获得目标的位置和姿态。在这种情况下,令靶标对准激光发射单元,能够实现靶标反向跟踪,进而能够扩大探头所能够接收的激光束的入射角度的范围。由于探头设置于目标,能够利用靶标相对于激光跟踪仪的位置确定目标的位置,同时,获取靶标相对于激光跟踪仪的位置后,能够获得激光束在激光跟踪仪设备坐标系的方向向量,靶标对准激光发射单元后,能够根据靶标的旋转角度获得激光束在靶标坐标系中的方向向量,从而能够利用坐标变换的方式建立等式,由于目标的欧拉角和激光跟踪仪设备坐标系与靶标坐标系之间的变换关系相关联,因此能够基于等式计算出目标的欧拉角。
13、根据本公开,能够提供一种能够基于靶标的旋转角度和目标的部分欧拉角计算目标的欧拉角,不仅能够扩大靶标的可接收的角度范围,还能够降低靶标控制成本的基于反向跟踪的测量方法和测量系统。
- 还没有人留言评论。精彩留言会获得点赞!