一种车道级道路规划方法、装置、终端设备及存储介质与流程
本发明涉及高精度地图数据应用,尤其涉及一种车道级道路规划方法、装置、终端设备及存储介质。
背景技术:
1、在现有的自动驾驶和驾驶辅助领域中,高精度地图作为高级驾驶辅助必备的传感器,起到了巨大的作用,但由于高精度地图的数据模型复杂,数据内容丰富,导致在长距离的路径规划时需要很大的算力支撑,而在自动驾驶过程中,对于地图的需求只需车辆前后放一小段详细的车道级信息,从而使车道级路径规划依赖道路级路径规划的输入;
2、在当前车道级依赖道路级规划过程中,往往对长距离的道路级路径规划结果向车道级路径规划进行直接映射后,得到全局的车道级规划结果,对算力的需求依旧很高,用户使用时需要等待较长的时间,或者需要云端的算力支持。
技术实现思路
1、本发明实施例提供一种车道级道路规划方法、装置、终端设备及存储介质,能降低在车道级规划时对算力的需求。
2、本发明一实施例提供种车道级道路规划方法,包括:
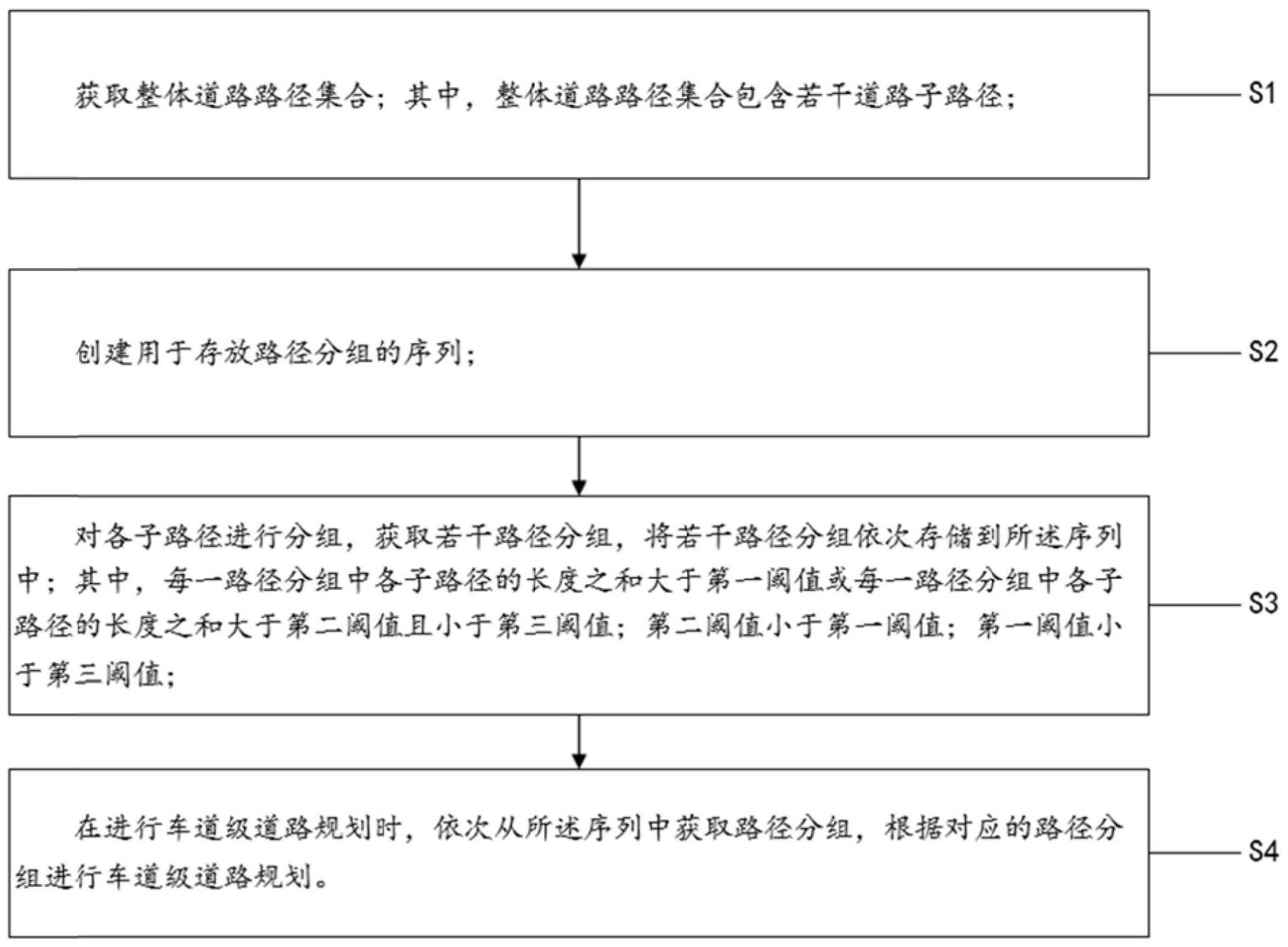
3、获取整体道路路径集合;其中,整体道路路径集合包含若干道路子路径;
4、创建用于存放路径分组的序列;
5、对各子路径进行分组,获取若干路径分组,将若干路径分组依次存储到所述序列中;其中,每一路径分组中各子路径的长度之和大于第一阈值或每一路径分组中各子路径的长度之和大于第二阈值且小于第三阈值;第二阈值小于第一阈值;第一阈值小于第三阈值;
6、在进行车道级道路规划时,依次从所述序列中获取路径分组,根据对应的路径分组进行车道级道路规划。
7、进一步地,所述对各子路径进行分组,获取若干路径分组,包括:
8、单次分组容器创建步骤:创建用于存储子路径的数组;
9、子路径获取步骤:遍历整体道路路径集合,从整体道路路径集合头部获取当前子路径,并从整体道路路径集合中剔除已获取的子路径,执行空集判断步骤;
10、空集判断步骤:判断当前子路径是否为空集;若是,则整体道路路径集合分组结束,不再执行后续步骤;若否,则将当前子路径放入数组尾部,继而计算当前子路径的长度,执行有效距离计算步骤;
11、有效距离计算步骤:判断当前子路径的标识符是否为路线起点道路的标识符;若是,则计算路线起点到当前子路径的终点之间的距离作为当前子路径的有效距离;若否,则将当前子路径的长度作为当前子路径的有效距离;
12、途经地判断步骤:判断当前子路径的标识符是否为途经地道路的标识符;若是,执行路径起点判断步骤;若否,执行路线终点判断步骤;
13、路径起点判断步骤:判断当前位置是否为当前子路径的起点位置;若是,则计算当前子路径中途经地到当前子路径的终点之间的距离,作为当前子路径的有效距离,执行终点判断步骤;若否,计算当前子路径中途经地到当前子路径的终点之间的距离,得到当前子路径的道路长度,计算当前子路径的有效距离与当前子路径的道路长度之间的差值得到当前子路径的有效距离,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行单次分组容器创建步骤;
14、路线终点判断步骤:判断当前子路径的标识符是否为路线终点的标识符;若是,则计算当前路线终点到当前子路径的终点的距离,得到当前子路径的道路长度,计算当前子路径的有效距离与当前子路径的道路长度之间的差值得到当前子路径的有效距离,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行单次分组容器创建步骤;若否,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,执行第一距离判断步骤;
15、第一距离判断步骤:判断当前路径分组的总长度是否大于第一阈值;若是,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤;若否,则执行子路径获取步骤。
16、进一步地,当前子路径的标识符为路线终点的标识符,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行单次分组容器创建步骤,包括:
17、当前子路径的标识符不为路线终点的标识符,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行第二距离判断步骤;
18、第二距离判断步骤:判断当前路径分组的总长度是否小于第二阈值,若是,则从所述序列尾部取出上一路径分组,执行第三距离判断步骤;若否,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤;
19、第三距离判断步骤:判断上一路径分组的总长度是否大于第三阈值,若是,则将上一路径分组存入当前路径分组的数组尾部,更新当前路径分组,计算当前路径分组的总长度,将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤;若否,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤。
20、进一步地,当前子路径的标识符包含途经地的标识符且途经地不为当前子路径的起点位置,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行单次分组容器创建步骤,包括:
21、当前子路径的标识符包含途经地的标识符且途经地不为当前子路径的起点位置,将当前子路径所在数组中各子路径的有效距离进行累加,得到当前路径分组的总长度,结束当前路径分组,执行第二距离判断步骤;
22、第二距离判断步骤:判断当前路径分组的总长度是否小于第二阈值,若是,则从所述序列尾部取出上一路径分组,执行第三距离判断步骤;若否,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤;
23、第三距离判断步骤:判断上一路径分组的总长度是否大于第三阈值,若是,则将上一路径分组存入当前路径分组的数组尾部,更新当前路径分组,计算当前路径分组的总长度,将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤;若否,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤。
24、进一步地,当前路径分组的总长度大于第一阈值,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤,包括:
25、当前路径分组的总长度大于第一阈值,判断当前子路径是否包含进入路口;若是,则执行子路径获取步骤;若否,则将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤。
26、进一步地,当前子路径不包含进入路口,将当前路径分组存储到所述序列尾部,执行单次分组容器创建步骤,包括:
27、判断当前子路径是否包含路口内路径,若是,则执行子路径获取步骤;若否,则将当前子路径存放到当前路径分组的数组中,并将该数组放入所述序列的尾部,执行单次分组容器创建步骤。
28、进一步地,各子路径包含子路径的信息;
29、所述子路径的信息包括:标识符和道路的类型。
30、在上述方法项实施例的基础上,本发明对应提供了装置项实施例;
31、本发明一实施例对应提供了一种车道级道路规划装置,包括:数据获取模块、分组模块和规划模块;
32、所述数据获取模块,用于获取整体道路路径集合;其中,整体道路路径集合包含若干道路子路径;
33、所述道路分段模块,用于创建用于存放路径分组的序列;
34、对各子路径进行分组,获取若干路径分组,将若干路径分组依次存储到所述序列中;其中,每一路径分组中各子路径的长度之和大于第一阈值或每一路径分组中各子路径的长度之和大于第二阈值且小于第三阈值;第二阈值小于第一阈值;第一阈值小于第三阈值;
35、所述道路规划模块,用于在进行车道级道路规划时,依次从所述序列中获取路径分组,根据对应的路径分组进行车道级道路规划。
36、本发明另一实施例提供了一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述发明实施例所述的一种车道级道路规划方法。
37、本发明另一实施例提供了一种存储介质,所述存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述存储介质所在设备执行上述发明实施例所述的一种车道级道路规划方法。
38、通过实施本发明具有如下有益效果:本发明提供了一种车道级道路规划方法、装置、终端设备及存储介质,通过获取整体道路路径集合,并对整体道路路径集合进行分组处理,将整体道路路径集合的路径分组存储在序列中,在进行车道级道路规划时,依次从序列中获取路径分组,并根据对应的路径分组进行计算,以逐一计算路径分组的方式避免了对长距离道路规划时一次计算全部路径,降低了在车道级规划时对算力的需求。
- 还没有人留言评论。精彩留言会获得点赞!