一种水深探测方法、装置、车载终端和存储介质与流程
本发明涉及智能交通,特别涉及一种水深探测方法、装置、车载终端和存储介质。
背景技术:
1、随着自动驾驶技术的发展,人们对智能驾驶汽车的安全越来越重视。同时,由于自然环境的变化,洪涝灾害频发,大部分城市的排水系统不足以应对强降雨,从而导致路面积水严重,水淹车事件时常发生。
2、当前汽车上装备的水深探测设备主要是用于涉水检测,通过安装在车外的探测器,检测车辆基准位置与水平面的距离,得到积水深度。然而这种方法受限于精确性及突发状况,无法提前预测积水深度,不能有效避免汽车淹水。
技术实现思路
1、本发明实施例提供一种水深探测方法、装置、车载终端和存储介质,用以解决现有技术中,车辆无法提前预测积水深度,避免车辆淹水的问题。
2、为了解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明实施例提供一种水深探测方法,包括:
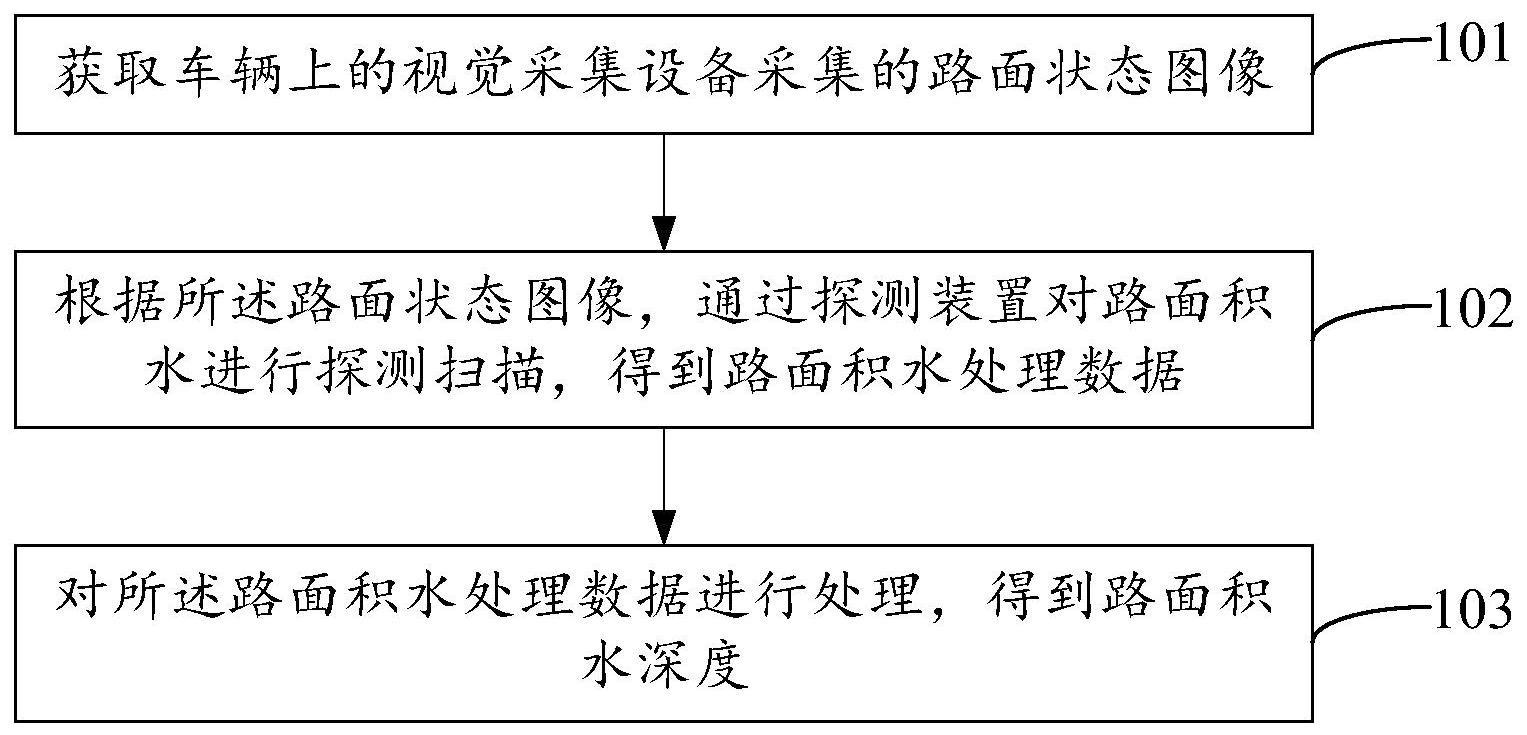
4、获取车辆上的视觉采集设备采集的路面状态图像;
5、根据所述路面状态图像,通过探测装置对路面积水进行探测扫描,得到路面积水处理数据;
6、对所述路面积水处理数据进行处理,得到路面积水深度。
7、可选地,所述路面积水处理数据包括以下至少一项:
8、所述探测装置发射的第一探测信号在空气中的传播的第一速度;
9、所述探测装置发射的第一探测信号在空气中的传播的第一时间;
10、所述探测装置发射的第一探测信号在积水中的传播的第二速度;
11、所述探测装置发射的第一探测信号在积水中的传播的第二时间;
12、所述探测装置距离地面的距离。
13、可选地,所述对所述路面积水处理数据进行处理,得到路面积水深度,包括:
14、根据探测装置发射的第一探测信号在空气中的传播的第一速度、探测装置发射的第一探测信号在空气中的传播的第一时间、探测装置发射的第一探测信号在积水中的传播的第二速度和探测装置发射的第一探测信号在积水中的传播的第二时间,得到所述探测装置的探测距离;
15、根据所述第二速度、所述第二时间和探测装置距离地面的距离,得到所述探测装置发射的第一探测信号与地面之间的第一夹角的正弦值;
16、根据所述探测装置的探测距离、所述探测装置距离地面的距离和所述第一夹角的正弦值,得到所述路面积水深度。
17、可选地,所述路面积水处理数据包括以下至少一项:
18、所述探测装置发射的第二探测信号在积水中的折射率;
19、所述探测装置发射的第二探测信号对应的回波信号的信号谱;
20、所述探测装置发射的第二探测信号在积水面的入射角。
21、可选地,所述对所述路面积水处理数据进行处理,得到路面积水深度,包括:
22、根据探测装置发射的第二探测信号在积水中的折射率和探测装置发射的第二探测信号在积水面的入射角,得到探测装置发射的第二探测信号在积水中的折射角;
23、根据探测装置发射的第二探测信号对应的回波信号的信号谱,确定所述第二探测信号在积水面和积水底反射的回波信号的信号峰值;
24、根据所述第二探测信号在积水面和积水底反射的回波信号的信号峰值,得到所述第二探测信号到达积水面和积水底之间的时间差;
25、根据所述探测装置发射的第二探测信号在积水中的折射率、所述第二探测信号在积水中的折射角和所述第二探测信号到达积水面和积水底之间的时间差,得到所述路面积水深度。
26、可选地,根据所述路面状态图像,通过探测装置对路面积水进行探测扫描,得到路面积水处理数据,包括:
27、对所述路面状态图像进行分析,得到路面积水的位置信息;
28、在所述路面积水的位置信息指示所述路面积水的边缘与所述车辆之间的距离小于预设距离的情况下,通过所述探测装置对所述路面积水进行探测扫描,得到所述路面积水处理数据。
29、可选地,所述通过探测装置对路面积水进行探测扫描,得到路面积水处理数据,包括:
30、通过所述探测装置对所述路面积水进行探测扫描,得到初始处理数据;
31、对所述初始处理数据进行降噪处理,得到降噪后的处理数据;
32、利用预设的拟合算法对所述降噪后的处理数据进行处理,得到所述路面积水处理数据。
33、可选地,所述方法还包括:
34、在所述路面积水深度超过预设深度的情况下,生成预警信息。
35、本发明实施例还提供一种水深探测装置,包括:
36、获取模块,用于获取车辆上的视觉采集设备采集的路面状态图像;
37、探测模块,用于根据所述路面状态图像,通过探测装置对路面积水进行探测扫描,得到路面积水处理数据;
38、处理模块,用于对所述路面积水处理数据进行处理,得到路面积水深度。
39、可选地,所述路面积水处理数据包括以下至少一项:
40、所述探测装置发射的第一探测信号在空气中的传播的第一速度;
41、所述探测装置发射的第一探测信号在空气中的传播的第一时间;
42、所述探测装置发射的第一探测信号在积水中的传播的第二速度;
43、所述探测装置发射的第一探测信号在积水中的传播的第二时间;
44、所述探测装置距离地面的距离。
45、可选地,所述处理模块,包括:
46、第一处理单元,用于根据探测装置发射的第一探测信号在空气中的传播的第一速度、探测装置发射的第一探测信号在空气中的传播的第一时间、探测装置发射的第一探测信号在积水中的传播的第二速度和探测装置发射的第一探测信号在积水中的传播的第二时间,得到所述探测装置的探测距离;
47、第二处理单元,用于根据所述第二速度、所述第二时间和探测装置距离地面的距离,得到所述探测装置发射的第一探测信号与地面之间的第一夹角的正弦值;
48、第三处理单元,用于根据所述探测装置的探测距离、所述探测装置距离地面的距离和所述第一夹角的正弦值,得到所述路面积水深度。
49、可选地,所述路面积水处理数据包括以下至少一项:
50、所述探测装置发射的第二探测信号在积水中的折射率;
51、所述探测装置发射的第二探测信号对应的回波信号的信号谱;
52、所述探测装置发射的第二探测信号在积水面的入射角。
53、可选地,所述处理模块,包括:
54、第四处理单元,用于根据探测装置发射的第二探测信号在积水中的折射率和探测装置发射的第二探测信号在积水面的入射角,得到探测装置发射的第二探测信号在积水中的折射角;
55、第五处理单元,用于根据探测装置发射的第二探测信号对应的回波信号的信号谱,确定所述第二探测信号在积水面和积水底反射的回波信号的信号峰值;
56、第六处理单元,用于根据所述第二探测信号在积水面和积水底反射的回波信号的信号峰值,得到所述第二探测信号到达积水面和积水底之间的时间差;
57、第七处理单元,用于根据所述探测装置发射的第二探测信号在积水中的折射率、所述第二探测信号在积水中的折射角和所述第二探测信号到达积水面和积水底之间的时间差,得到所述路面积水深度。
58、可选地,所述探测模块,包括:
59、分析单元,用于对所述路面状态图像进行分析,得到路面积水的位置信息;
60、探测单元,用于在所述路面积水的位置信息指示所述路面积水的边缘与所述车辆之间的距离小于预设距离的情况下,通过所述探测装置对所述路面积水进行探测扫描,得到所述路面积水处理数据。
61、可选地,所述探测单元,具体用于:
62、通过所述探测装置对所述路面积水进行探测扫描,得到初始处理数据;
63、对所述初始处理数据进行降噪处理,得到降噪后的处理数据;
64、利用预设的拟合算法对所述降噪后的处理数据进行处理,得到所述路面积水处理数据。
65、可选地,所述装置还包括:
66、信息生成模块,用于在所述路面积水深度超过预设深度的情况下,生成预警信息。
67、本发明实施例还提供一种车载终端,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上中任一项所述的水深探测方法。
68、本发明实施例还提供一种可读存储介质,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如上中任一项所述的水深探测方法中的步骤。
69、本发明的有益效果是:
70、本发明至少一个实施例中,通过获取车辆上的视觉采集设备采集的路面状态图像,对路面状态图像进行分析,确定存在路面积水的情况下,通过探测装置对路面积水进行探测扫描,得到路面积水处理数据,并对路面积水处理数据进行处理,可以提前得到路面积水深度,避免车辆淹水。
- 还没有人留言评论。精彩留言会获得点赞!