一种基于YOLOv8算法的轴承滚子缺陷检测方法及装置与流程
本发明涉及轴承滚子缺陷检测领域,具体为一种基于yolov8算法的轴承滚子缺陷检测方法及装置。
背景技术:
1、轴承滚子是轴承部件中的一个关键零件,其性能的好坏直接决定了机械设备运转的性能,由于在工厂加工的时候,轴承滚子的滚动表面会出现不同程度的损伤,例如划伤、摩擦、凹陷,生锈等,因此缺陷检测对轴承工业的发展具有重大的意义;
2、由于轴承滚子滚动面表面的光滑反光等问题,因此对光反射物体的探测通常需要复杂的照明系统,如明暗场,背光,同轴光源,一般来说,这些照明缺乏鲁棒性,应仔细选择和设置,否则,会在图像上产生大面积的白点,使缺陷特征难以捕捉,另一种选择是采用平面条纹光源的条纹投影技术,将条纹图案投影到物体上,当物体表面不均匀时,条纹图案就会变形,可以检测到产品表面的微小缺陷,条纹投影技术的使用弥补了上述光源的不足,但也不能充分反映光滑表面的缺陷;
3、目前广泛采用的传统的基于线阵相机加线光源的检测模式面临着许多困难,传统的采样方式无法有效甄别,其检测水平低,漏检率高已经无法满足企业的对轴承滚子缺陷检测的性能要求,且检测轴承滚子用的装置自动化程度底,一般使用半自动式上料组件将待检测的滚子输送至采样点,后期采集以及卸料均需要辅助人工操作,这样在大批量采集数据时,效率低下,因此需要设计一种基于yolov8算法的轴承滚子缺陷检测方法及装置。
技术实现思路
1、本发明的目的在于提供一种基于yolov8算法的轴承滚子缺陷检测方法及装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于yolov8算法的轴承滚子缺陷检测装置,所述一种基于yolov8算法的轴承滚子缺陷检测装置包括
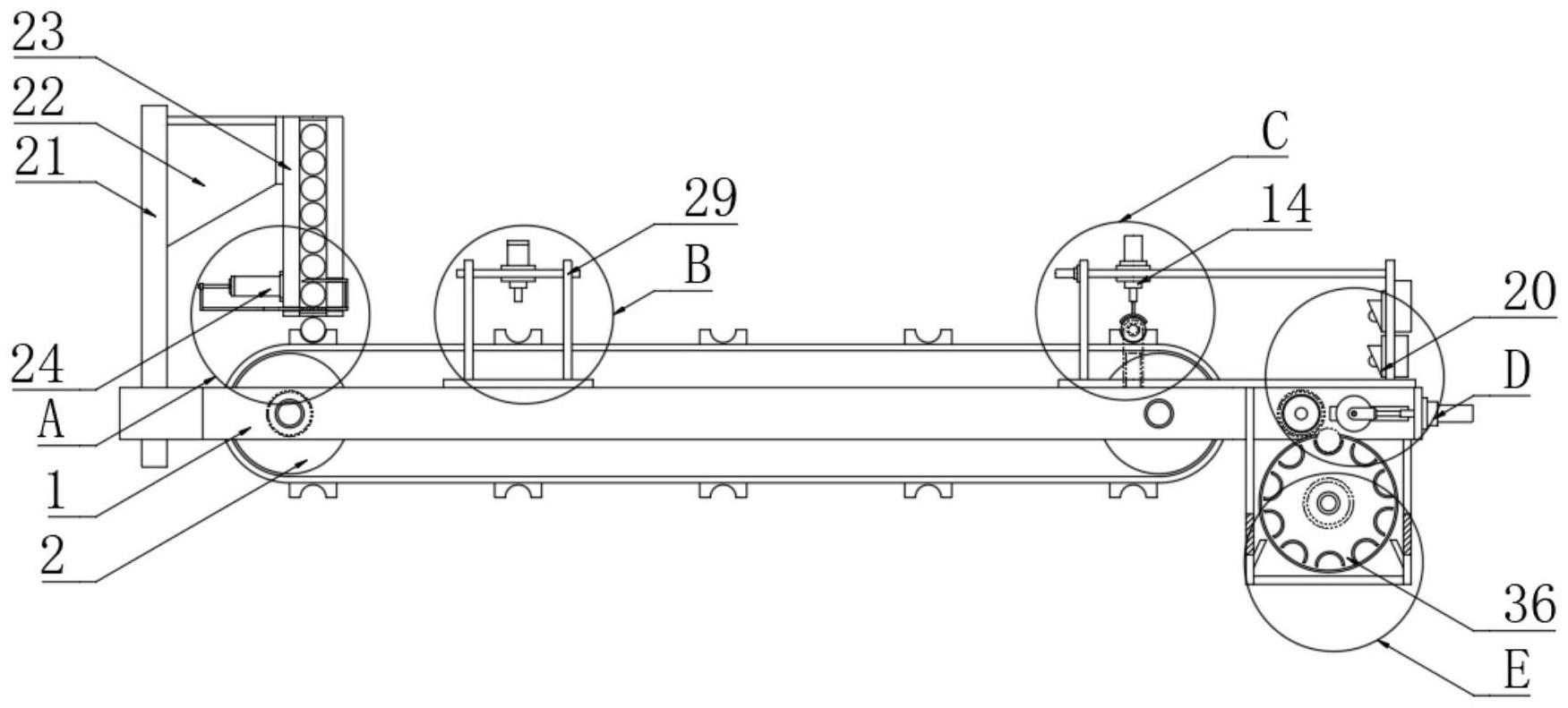
3、机架,所述机架的内部两端分别活动安装有主动滚筒和从动滚筒,所述主动滚筒和从动滚筒的外部活动安装有传送带,所述机架靠近主动滚筒的一侧外部设置有第一步进电机,所述第一步进电机的输出轴固定连接主动滚筒,所述传送带的外壁处固定连接有若干托块;
4、滑架,所述滑架固定连接于机架靠近从动滚筒的一侧顶端,所述滑架的一侧外部固定安装有伺服电机,所述滑架的内部两端均活动安装有丝杠,两个所述丝杠靠近伺服电机的一端分别安装有第一同步轮和第二同步轮,所述第一同步轮和第二同步轮通过同步带活动连接,所述伺服电机的输出轴端固定连接第二同步轮,两个所述丝杠的外部活动安装有滑台,所述滑台的顶端固定安装有第二气缸,所述第二气缸的输出轴端固定安装有电磁夹板;
5、底架,所述底架固定安装于机架靠近从动滚筒的一侧外部,所述底架的内部两端分别活动安装有导料辊和同步辊,所述底架的一侧外部固定安装有第二步进电机,所述第二步进电机的输出轴端固定连接导料辊;
6、单目相机,所述单目相机固定安装于滑架靠近底架的一侧,所述滑架靠近单目相机的一侧底端固定安装有第三定位传感器。
7、进一步的,所述机架靠近主动滚筒的一侧顶端固定安装有吊架,所述吊架靠近传送带的一侧顶端外部通过安装架固定安装有上料盒。
8、进一步的,所述上料盒靠近吊架的一侧底端外部固定安装有第一气缸,所述第一气缸远离上料盒的一侧底端固定安装有连杆,所述连杆靠近上料盒的底端内部固定安装有下料板,所述下料板远离连杆的一侧顶端通过连接件固定安装有挡板,所述挡板、下料板与上料盒活动连接,所述下料板的中部开设有通槽。
9、进一步的,所述机架靠近上料盒的一侧顶端固定安装有支架,所述支架的顶端中部固定安装有第一定位传感器。
10、进一步的,所述机架靠近从动滚筒的一侧顶部两端均固定安装有第二定位传感器,所述滑架靠近第三定位传感器的一侧外部固定安装有控制器,所述控制器与第三定位传感器、第二定位传感器和第一定位传感器电性连接。
11、进一步的,所述滑架靠近单目相机的一侧外部固定安装有存储器,所述存储器与单目相机电性连接。
12、进一步的,所述底架远离机架的一侧外部固定安装有第三气缸,所述第三气缸的输出轴端固定安装有轴架,所述轴架与同步辊通过转轴活动连接。
13、进一步的,所述底架靠近导料辊和同步辊的中部底端活动安装有导料盘,所述底架靠近导料盘的一侧外部固定安装有第三步进电机,所述第三步进电机的输出轴固定连接导料盘,所述导料盘的外侧环形安装有若干导料板。
14、进一步的,所述底架的底端内壁两端均固定安装有斜板,所述底架靠近两个所述斜板一侧均开设有下料口。
15、一种基于yolov8算法的轴承滚子缺陷检测方法,包括以下步骤:
16、步骤s1,图像采集,将步进电机、导料辊以及同步辊组成运动模块,通过输送组件将轴承滚子放置在导料辊以及同步辊上方,启动步进电机带动导料辊滚动,使滚子匀速滚动,采用不均匀光照法,并使用单目相机拍摄该画面,进行数据采集;
17、步骤s2,数据标注,采用帕多瓦增量数据标注方法,通过在已经采集的轴承滚子图片数据集上进行增量标注,逐步扩展图片数据集,从而提高标注的准确性和完整性;
18、步骤s3,数据预处理,将自采集的数据集进行预处理,包括水平上下翻转、旋转、滤波、mixup、加噪等操作,以提高模型后续的鲁棒性;
19、步骤s4,参数配置,设定训练轮次epoch为300次,学习率为0.01%,每30个轮次缩小2倍,对模型进行训练,当模型的测试集得分趋于稳定时且得分达到97%以上时,停止训练,保存当前模型权重文件;
20、步骤s5、模型训练,将yolov8算法部署在服务中,为该算法设置采集数据集,进行训练,将每轮训练得到的预测值p和真实值t送入交叉熵损失函数中,计算损失值,并将得到的损失值回传到yolov8模型中,进而控制预测值的准确性;
21、步骤s6,缺陷预测,将权重文件代入模型中,当企业中有需要待检测的轴承滚子时,只需要将拍摄采集的画面送入模型,即可完成缺陷预测。
22、进一步的,所述步骤s1中,从企业中寻找含有各种缺陷的轴承滚子共计2500个和无缺陷的轴承滚子500个,然后使用单目摄像机拍摄滚动中的轴承滚子,每间隔0.6秒拍摄1次,一个轴承滚子拍摄3张图片,接着对拍摄到的所有数据划分为测试集和训练集,其中测试集和训练集的比例为3:7;
23、进一步的,所述步骤s2中,首先,选择已采集完毕的已标注的数据集;接着,针对数据集中的一部分文本进行初步标注;然后,根据初步标注的结果,使用自动化的算法对未标注的部分进行标注;接着,人工检查自动标注的结果,进行修正和补充;最后,使用修正和补充后的数据集,重复以上步骤,直到达到所需的标注质量;
24、进一步的,所述步骤s5中,将yolov8算法部署在服务中,为该算法设置上述数据预处理后的数据集,进行训练,并将得到的损失值回传到yolov8模型中,进而控制预测值的准确性,每经过1个轮次的训练后,使用模型对训练集进行预测,将预测得到的预测值p和测试集样本的真实值t送入交叉熵损失函数中,计算损失值,输出模型得分;
25、进一步的,所述步骤s6中,经训练得到的模型权重文件代入模型中,经过上述相同的图片采集步骤和数据预处理步骤,并输入到模型中,即可得到轴承滚子的模型预测值,大大的提高了企业检测轴承滚子的效率,降低了企业的检测成本。
26、与现有技术相比,本发明的有益效果是:
27、1、本发明通过机架、上料盒、传送带、电磁夹板、单目相机、导料辊和同步辊之间配合使用,使得整个采样过程全自动化操作,无需人工上下料以及辅助采样,在大批量采样时,效率更高;
28、2、本发明在自动下料时,启动第一气缸,第一气缸启动后推动连杆,连杆往一侧移动时拉动下料板以及挡板,这时下料板与挡板之间的滚子会穿过下料板中部的通槽落入底端的托块上,而挡板顶端的滚子通过挡板的阻挡无法下落,这样即可在下料时,控制每次单个下料,从而达到便于自动下料的目的;
29、3、本发明中当滚子检测完成后,启动第三气缸,第三气缸启动后带动轴架收回,轴架收回时带动同步辊同步收回,这样导料辊与同步辊之间的滚子会下落,当滚子下落后,第三气缸再次控制同步辊复位,从而达到便于下料的目的。
- 还没有人留言评论。精彩留言会获得点赞!