一种基于多平台的水下定点目标快速标校系统及方法与流程
本发明涉及海洋测绘及工程应用,具体涉及一种基于多平台的水下定点目标快速标校系统及方法。
背景技术:
1、水声定位系统根据基线长度可分为长基线、短基线、超短基线定位系统,可通过声学应答模式获取水下移动或定点目标的定位时延信号。随着水声定位技术的不断发展和应用,长基线、超短基线等不同的测量体制应用范围逐渐广泛、定位精度逐渐提高,其中,在长基线定位测量体制下,各阵元需按照点位要求布放于海底预定位置,为实现长基线定位系统的高精度测量,与超短基线开展安装误差校准方法类似,需要识别阵元布放完成后的系统误差并进行消除,因此,各阵元完成海底布放后,需要开展阵元位置的高精度标定工作,获取该位置点的高精度位置信息,作为最终长基线高精度定位解算的基础。
2、在真实海洋环境条件下开展水声定位作业,对定位精度要求和作业效率要求较高,需要重点考虑突变性海况和高海情条件的影响,其不仅增加了水声定位系统海上作业的难度,同时影响海上作业的时效性和声学数据的可靠性。目前开展标校作业的测量平台一般根据工作海域深度及布放载荷要求不同选择相应的船型和作业半径,需要事前获取布放海域底质和深度信息数据,规划各个目标的作业航迹,同时存在顺序完成各标校点位作业周期长、易反复的问题,考虑到海上作业的气象水文窗口窄的情况和水下阵元载荷的自容式工作设计要求,需要发展一种基于多平台协同作业的新型快速标校技术,以提升标校作业的效率和精度。
技术实现思路
1、本发明所要解决的技术问题是,如何提升标校作业的效率和精度。
2、为达到上述目的,本发明提供一种基于多平台的水下定点目标快速标校系统及方法,采用多个标校平台进行相互合作,利用主标校平台对采集作业进行统筹和对采集的数据进行处理,提升标校作业的效率和精度。
3、本发明实施例第一方面公开了一种基于多平台的水下定点目标快速标校系统,所述系统包括:m个标校平台、n个水下定点目标;所述n为不小于1的整数;所述m为不小于2的整数;所述标校平台搭载有计算处理模块、通信模块、声速剖面仪、高精度全球卫星定位系统设备、高精度姿态测量设备、声学换能器;
4、所述m个标校平台中包括1个主标校平台,其余为普通标校平台;所述主标校平台用于生成标校分配信息表、进行标校作业、接收其他各标校平台的初始测量数据并进行汇集处理,生成与所述n个水下定点目标相对应的n个初始测量数据序列,对所述n个初始测量数据序列进行处理,得到n个水下定点目标的标校信息;所述普通标校平台用于根据标校分配信息进行标校作业,并将测得的初始测量数据发送至主标校平台、空余时间进行交叉校核;
5、所述标校作业包括:利用所述高精度全球卫星定位系统设备获取高精度定位数据,利用所述高精度姿态测量设备获取姿态变化数据;利用声学换能器用于与水下定点目标进行信号交换和测量信号传播时间,利用所述计算处理模块记录测量数据、计算测距信息,生成初始测量数据;所述主标校平台与所述普通标校平台通过所述通信模块进行无线通信连接;
6、所述水下定点目标上设置有至少一组合作声信标;所述合作声信标能够接收标校平台上声学换能器发送的信号、按照固定的编码格式进行水声信号的预制,通过应答触发模式设置进行声信号的周期性发射;所述水下定点目标设置有深度传感器;
7、所述标校平台能够获取所述水下定点目标的合作声信标发送信号和测距时延信息。
8、可选的,所述标校平台为水面无人船或有人船平台;若所述标校平台中包括有人标校平台,选择有人的标校平台作为主标校平台,完成对本标校平台和其他标校平台航迹规划、数据实时共享、作业数据回传、准实时处理、精度分析等工作,各标校平台以机动性、稳定性、兼容性为平台操作要求,提高海上协同作业效率。
9、本发明实施例第二方面公开了一种基于多平台的水下定点目标快速标校方法,应用于本发明实施例第一方面公开的基于多平台的水下定点目标快速标校系统,所述方法包括:
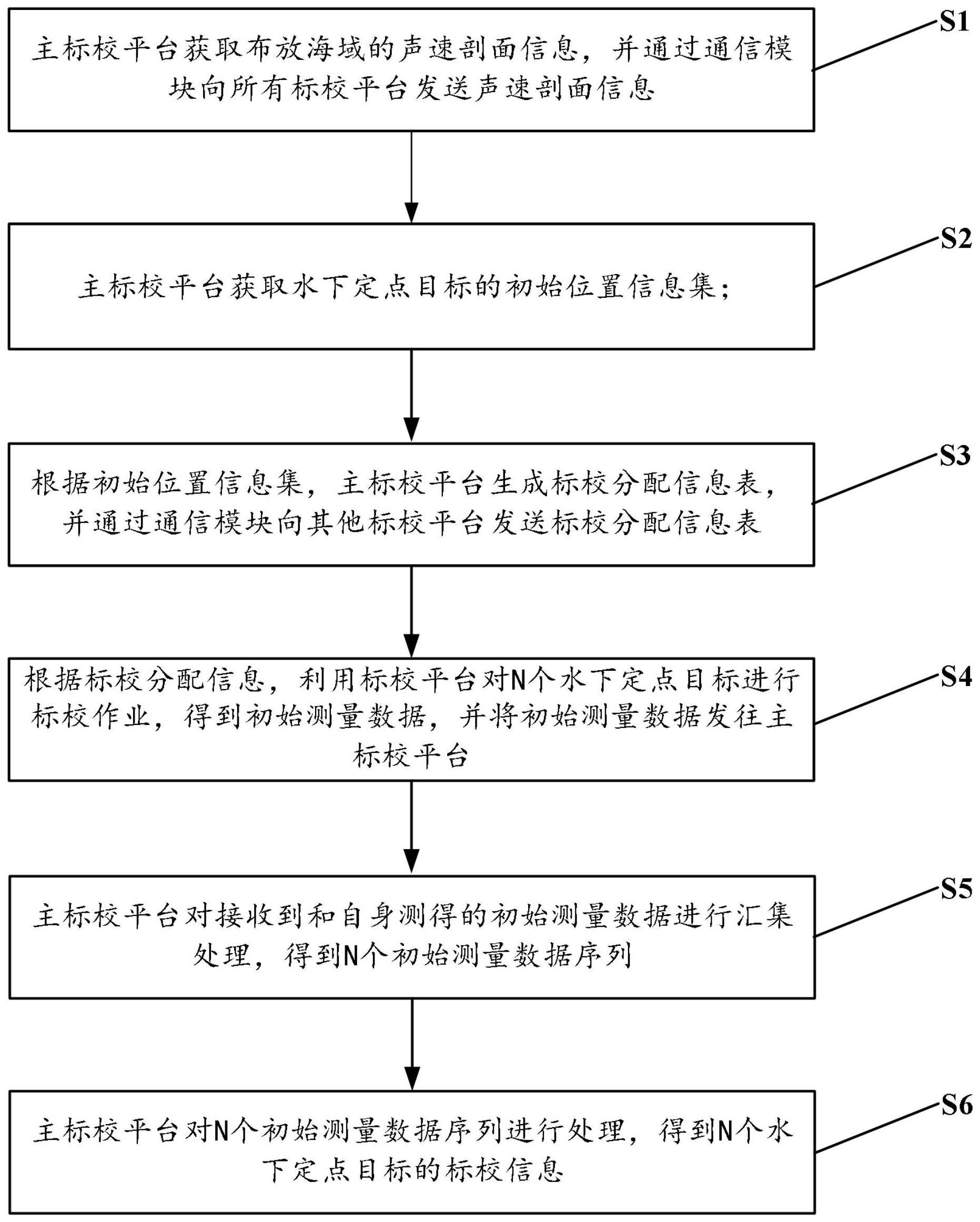
10、s1、主标校平台获取布放海域的声速剖面信息,并通过通信模块向所有标校平台发送所述声速剖面信息;
11、s2、所述主标校平台获取水下定点目标的初始位置信息集;所述初始位置信息集包括n个水下定点目标的初始位置信息;所述初始位置信息包括经纬度和点位深度值;所述n表征水下定点目标的个数;
12、所述主标校平台利用高精度全球卫星定位系统设备获取布放点的经纬度,通过阵元预置的深度传感器获取该点位深度值;
13、s3、根据所述初始位置信息集,所述主标校平台生成标校分配信息表,并通过通信模块向其他标校平台发送所述标校分配信息表;所述标校分配信息表包括n个分配信息;每个所述分配信息对应一个水下目标,所述分配信息包括水下定点目标的编号、该水下定点目标的初始位置信息、对应的标校平台和航迹规划;所述航迹规划包括航线和测量点信息;
14、s4、根据所述标校分配信息,利用标校平台对n个水下定点目标进行标校作业,得到初始测量数据,并将初始测量数据发往主标校平台;所述标校平台表征主标校平台和普通标校平台;所述初始测量数据包括水下定点目标的初始位置信息、采集时间、标校平台的高精度定位数据、标校平台的姿态变化数据、换能器的高精度位置和水下定点目标测距信息;
15、s5、主标校平台对接收到和自身测得的初始测量数据进行汇集处理,得到n个初始测量数据序列;所述n个初始测量数据序列与n个水下定点目标一一对应;所述初始测量数据序列包括若干个按预设时间间隔采集的初始测量数据,所述初始测量数据序列包括若干个初始测量数据,且按时间顺序排列;
16、s6、主标校平台对所述n个初始测量数据序列进行处理,得到n个水下定点目标的标校信息;所述标校信息包括布放位置,精度信息。
17、作为一种可选的实施方式,在本发明实施例第二方面中,所述主标校平台按预设的声速测量时间周期利用声速剖面仪重新获取、更新作业海域声速剖面信息,并利用通信模块实时向其他标校平台发送更新后的声速剖面信息。
18、作为一种可选的实施方式,在本发明实施例第二方面中,所述作业航迹规划为通过以水下定点目标为中心的圆形航迹、或、过圆心的交叉垂直航迹、或、以布放点为中心的方形航迹等航迹的组合规划。
19、作为一种可选的实施方式,在本发明实施例第二方面中,所述根据所述标校分配信息,利用标校平台对n个水下定点目标进行标校作业,得到初始测量数据,并将初始测量数据发往主标校平台,包括:
20、对n个水下定点目标中任一水下定点目标,利用所述标校分配信息中指定的标校平台进行标校作业,得到所述任一水下定点目标的初始测量数据,并将初始测量数据发往主标校平台,具体的:
21、s41、根据所述标校分配信息中的航迹规划,所述指定的标校平台行驶至航迹规划的测量点后,按预设的采集时间间隔进行采集作业,记录采集时间,获取此时所述指定的标校平台的高精度定位数据和姿态变化数据;所述高精度定位数据利用高精度全球卫星定位系统设备获取;所述姿态变化数据利用高精度姿态测量设备获取;
22、s42、所述指定的标校平台对所述高精度定位数据和姿态变化数据进行计算处理,得到换能器的高精度位置;
23、s43、所述指定的标校平台利用换能器发射周期性制式声信号,所述任一水下定点目标获取声信号后回复制式声信号,所述指定的标校平台根据声速剖面信息和测得的时延差信息,计算得到水下定点目标测距信息;
24、s44、所述指定的标校平台将所述任一水下定点目标的初始位置信息、采集时间、标校平台的高精度定位数据、标校平台的姿态变化数据、换能器的高精度位置和水下定点目标测距信息组成生成一个初始测量数据,并发往主标校平台;
25、s45、所述指定的标校平台判断是否完成所述航迹规划中所有测量点的标校作业,得到第一判断结果;如果第一判断结果为否,则根据所述航迹规划中前往下一个测量点,触发执行步骤s41;如果第一判断结果为是,则结束标校作业,向主标校平台发送标校完成工作信号;所述标校完成工作信号包括所述任一水下定点目标的初始位置信息和完成标识。
26、作为一种可选的实施方式,在本发明实施例第二方面中,所述标校平台根据所述标校分配信息中的航迹规划,所述指定的标校平台行驶至航迹规划的测量点后,可动态调整规划的标校航迹,在所述标校分配信息中的航迹规划基础上重新规划新的作业航迹。
27、作为一种可选的实施方式,在本发明实施例第二方面中,所述主标校平台对接收到和自身测得的初始测量数据进行汇集处理,得到n个初始测量数据序列,包括:
28、s51、所述主标校平台构建与n个水下定点目标一一对应的n个初始测量数据序列;所述n个初始测量数据序列初始值都为空;
29、s52、所述主标校平台接收到来自其他各标校平台的初始测量数据;
30、s53、所述主标校平台将接收的初始测量数据和自身测得的初始测量数据按采集时间顺序插入至相应的初始测量数据序列中;
31、s54、所述主标校平台接收到标校完成工作信号后,将对应的初始测量数据序列标记为已完成测量状态;
32、s55、所述主标校平台将所有标记为已完成测量状态的初始测量数据序列进行汇集,得到n个初始测量数据序列。
33、作为一种可选的实施方式,在本发明实施例第二方面中,所述主标校平台对所述n个初始测量数据序列进行处理,得到n个水下定点目标的标校信息,包括:
34、s61、所述主标校平台对所述n个初始测量数据序列进行预处理,得到n个可用测量数据信息序列;
35、s62、对所述n个可用测量数据信息序列进行处理,得到n个水下定点目标的标校信息。
36、在该可选的实施例中,作为一种可选的实施方式,所述主标校平台对所述n个初始测量数据序列进行预处理,得到n个可用测量数据信息序列,包括:
37、对所述n个初始测量数据序列中任一初始测量数据序列进行预处理,得到该任一初始测量数据序列对应的可用测量数据信息序列,具体的:
38、s611、对所述任一初始测量数据序列进行空缺补齐处理,得到第二初始测量数据序列;
39、s612、对所述第二初始测量数据序列进行野点剔除处理,得到第三初始测量数据序列;
40、s613、对所述第三初始测量数据序列进行平滑处理,得到该任一初始测量数据序列对应的可用测量数据信息序列。
41、在该可选的实施例中,作为一种可选的实施方式,所述对所述任一初始测量数据序列进行空缺补齐处理,得到第二初始测量数据序列,包括:
42、s6111、判断所述任一初始测量数据序列中任一相邻的两个初始测量数据xi,xi+1的采集时间差是否都处在预设的采集时间间隔范围内,得到第三判断结果;
43、如果所述第三判断结果为是,则将所述任一初始测量数据序列设为第二初始测量数据序列;
44、如果所述第三判断结果为否,则在所述相邻的两个初始测量数据xi,xi+1的之间补齐缺失的初始测量数据,更新所述任一初始测量数据序列,并继续执行步骤s6111;
45、可选的,上述如果所述第三判断结果为否,则在所述相邻的两个初始测量数据xi,xi+1的之间补齐缺失的初始测量数据,更新所述任一初始测量数据序列,包括:
46、将所述采集时间差与预设的采集时间间隔相除,得到数据缺失宽度wi,所述数据缺失宽度表征相邻的两个初始测量数据xi,xj之间缺失的初始测量数据个数;
47、所述数据缺失宽度wi计算公式为:
48、
49、式中,δt表示采集时间差,t0表示预设的采集时间间隔;
50、将所述初始测量数据xi+1在所述任一初始测量数据序列中的序号由i+1更新为i+wi+1,在初始测量数据xi,之间添加wi个初始测量数据,更新所述任一初始测量数据序列;
51、其中空缺初始测量数据补偿值xj为:
52、
53、式中,xj表示空缺初始测量数据补偿值,所述i<j<i+wi+1。
54、在该可选的实施例中,作为一种可选的实施方式,所述对所述第二初始测量数据序列进行野点剔除处理,得到第三初始测量数据序列,包括:
55、假定y=[y1,…,ym]t为所述第二初始测量数据序列中的初始测量数据,x为已知的列满秩的设计矩阵,β=[β1,…,βm]t为未知待求的参数,三者满足关系式y=xβ,因测量数据一般大于未知参数,导致上式无法得到解析解,因此,将方程组变更为y=xβ+ε,设计数据矩阵x,并给定显著性水平α,得到数据估计参数数据估计方差和残差值计算得到分位数t1-α/2,通过对每个测量数据样本yj的遍历性检查,得到每个数据的异己样本方差和异己投影hjj,从而可得到贝尔斯利检测统计量对测量数据样本yj进行遍历性检查,判断并完成野点数据剔除,得到第三初始测量数据序列。
56、在该可选的实施例中,作为一种可选的实施方式,所述对所述n个可用测量数据信息序列进行处理,得到n个水下定点目标的标校信息,包括:
57、对所述n个可用测量数据信息序列中任一可用测量数据信息序列进行计算处理,得到所述任一可用测量数据序列对应的水下定点目标的标校信息,具体的:
58、s621、根据所述任一可用测量数据序列,利用多圆交汇定位法进行计算,得到第一计算位置;
59、s622、根据所述第一计算位置,计算所述任一可用测量数据序列中每个测量点的斜距计算值,得到斜距计算值序列;
60、s623、基于所述任一可用测量数据序列和所述斜距计算值序列,计算每个测量点的水下定点目标测距信息与斜距计算值的残差值和残差平方和,得到第一残差值序列和第一残差平方和;
61、s624、根据所述第一残差值序列和所述第一残差平方和,得到对应的水下定点目标的雅克比矩阵;
62、s625、根据所述雅克比矩阵,利用参数迭代增量模型进行计算,得到参数迭代增量值;
63、所述参数迭代增量模型为:
64、δx=(jtj)-1jte
65、式中,δx表示参数迭代增量值,j表示雅克比矩阵,jt表示雅克比矩阵转置,e表示第一残差值序列;
66、s626、基于所述参数迭代增量值,对所述任一可用测量数据序列进行处理计算,得到第二计算位置;
67、s627、根据所述第二计算位置,计算所述任一可用测量数据序列中每个测量点的斜距计算值,得到第二斜距计算值序列;
68、s628、基于所述任一可用测量数据序列和所述第二斜距计算值序列,计算每个测量点的水下定点目标测距信息与斜距计算值的残差值和残差平方和,得到第二残差值序列和第二残差平方和;
69、s629、将第二残差平方和与第一残差平方和相减,得到残差平方和增量;
70、s630、判断所述参数迭代增量值是否大于预设的精度判据,得到第二判断结果;如果所述第二判断结果为否,则利用所述第二残差值序列和所述第二残差平方和更新所述第一残差值序列和所述第一残差平方和,触发执行步骤s624;如果所述第二判断结果为是,则将第二位置确定为布放位置,所述第二残差平方和确定为精度信息,得到所述任一可用测量数据序列对应的水下定点目标的标校信息。
71、作为一种可选的实施方式,在本发明实施例第二方面中,所述方法还包括:
72、普通标校平台完成所述标校分配信息指定的标校作业任务后,对其他水下目标点进行标校作业,得到所述其他水下目标点的参考初始测量数据序列;
73、所述普通标校平台利用多圆交汇定位法,对所述参考初始测量数据序列进行计算,得到所述其他水下目标点的参考布放位置信息;所述参考布放位置信息包括水下定点目标的编号、参考布放位置;
74、所述普通标校平台将所述参考布放位置信息发送至主标校平台;
75、主标校平台利用所述参考布放位置信息对计算得到标校信息进行交叉校核。
76、与现有技术相比,本发明实施例具有以下有益效果:
77、本发明实施例中,公开了一种基于多平台的水下定点目标快速标校系统及方法。所述统包括若干个标校平台和待测水下定点目标;标校平台中包括一个主标校平台;主标校平台获取并广播声速剖面信息,获取水下定点目标的初始位置信息集,生成标校分配信息表;标校平台根据所述标校分配信息,对水下定点目标进行标校作业,得到初始测量数据,并将初始测量数据发往主标校平台;主标校平台对接收到来自各标校平台的初始测量数据进行汇集和处理,得到水下定点目标的标校信息;各标校平台完成各自目标航迹作业后,还可对相近目标点开展测量,完成不同点位交叉测距作业,与其他各标校平台间实现不同水下目标点的交叉校核。可见,本发明通过设计多个标校平台协同作业场景,对特定海域内布放的单个或多个定点目标,实现快速高效位置标校。在海上作业方面,能够引入无人平台,有效解决人在海上平台作业条件下的安全问题、适应性问题;在标校解算精度分析方面,多平台对同一目标的标校结果可互相作为真值进行交叉校核,提高定位精度;在作业效率方面,多个标校平台进行合作标校,提高作业效率,并具有交叉校核优势。
- 还没有人留言评论。精彩留言会获得点赞!